Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематическое исследование плоских механизмовСодержание книги
Поиск на нашем сайте
Кривая, по которой перемещается точка звена во время работы механизма, называется траекторией этой точки. Масштабным коэффициентом называется отношение численного значения физической величины к длине отрезка, изображающего эту величину. Кинематической диаграммой называется кривая в прямоугольной системе координат, представляющая зависимость какого-либо параметра движения звена от времени или угла поворота ведущего звена. Планом скоростей звена называется графическое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные скорости точек звена плоского механизма, а отрезки, соединяющие концы лучей, – относительные скорости соответствующих точек при данном положении звена. Планом скоростей механизма называется совокупность планов скоростей звеньев механизма с одним общим полюсом. Относительная скорость между двумя точками, лежащими на одном звене, всегда перпендикулярна к прямой, соединяющей эти точки. Свойства плана скоростей: – фигура на плане скоростей, образованная векторами относительных скоростей, подобна фигуре на звене, образованной отрезками, соединяющими соответствующие точки; – план скоростей дает возможность находить угловую скорость звена. Для этого нужно относительную скорость между любыми двумя точками, лежащими на одном звене, разделить на расстояние между этими точками:
– по плану скоростей можно найти положение мгновенного центра скоростей звена, т. е. точки на звене, скорость которой в данный момент равна нулю; – на плане скоростей можно найти направления касательных и нормалей к траекториям точек без построения самих траекторий. Планом ускорений звена называется графическое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные ускорения точек звена плоского механизма, а отрезки, соединяющие концы лучей, – относительные ускорения соответствующих точек при данном положении звена. Планом ускорения механизма называется совокупность планов ускорений звеньев механизма с одним общим полюсом. Свойства плана ускорений: – фигура на плане ускорений, образованная векторами относительных ускорений, подобна фигуре на звене, образованной отрезками, соединяющими соответствующие точки; – план ускорений позволяет определять угловые ускорения звеньев. Для этого необходимо относительное касательное ускорение между любыми двумя точками звена разделить на расстояние между этими точками:
– по плану ускорений можно найти положение мгновенного центра ускорений звена, т. е. точку на звене, ускорение которой в данный момент равно нулю; – план ускорений дает возможность находить радиусы кривизны траекторий без их построения.
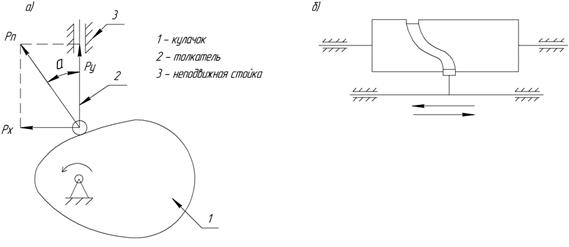
Кулачковые механизмы Кулачковым механизмом называется механизм, в состав которго входит кулачок (звено, рабочая поверхность которого имеет переменную кривизну) (рис. 42).
Рис. 42
Классификация кулачковых механизмов 1. В зависимости от вида относительного движения звеньев: а) плоские (кулачок и толкатель перемещаются в параллельных плоскостях) (рис. 42а); б) пространственные (кулачок и толкатель перемещаются в непараллельных плоскостях) (рис. 42б). 2. По видам движения кулачка: а) с поступательно движущимися кулачками (рис. 43а); б) с вращающимися кулачками (рис. 42а); в) с качающимися кулачками (рис. 43б).
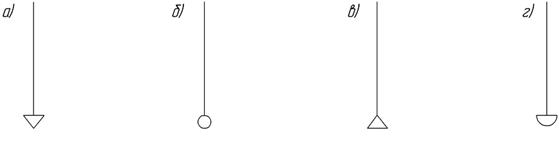
Рис. 43 3. В зависимости от характера движения толкателя: а) возвратно-поступательные; б) колебательные; в) сложные. 4. По профилю рабочей поверхности толкателя: а) остроконечный (рис. 44а); б) роликовый (рис. 44б); в) плоский (рис. 44в); г) сферический (рис. 44г).
Рис. 44
5. В зависимости от типа кулачка: а) дисковые (рис. 42а); б) пазовые (рис. 42б). 6. В зависимости от расположения оси толкателя и центра вращения кулачка: а) центральные (рис. 42а); б) дезаксиальные (рис. 43б). Углом давления α (рис. 42а) называется угол между направлением силы и направлением перемещения, вызванного этой силой. Составляющая сила Ру является движущей силой для толкателя и определяется по формуле Ру = Р n cosα. Составляющая сила Рх прижимает толкатель к направляющей и определяется по формуле Рх = Р n sinα.
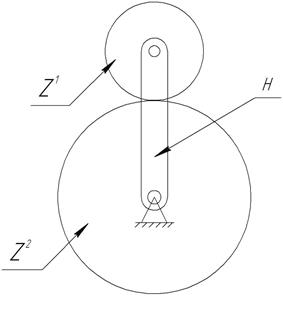
Зубчатые механизмы Зубчатая передача представляет собой передаточный механизм, звеньями которого являются зубчатые колеса, служащие для передачи движения и сил путем непосредственного зацепления. Зубчатой передачей называется трехзвенный механизм, имеющий две низшие и одну высшую кинематические пары. Зубчатым колесом называется звено с замкнутой системой зубьев, обеспечивающее за свой полный оборот непрерывность движения парного звена в одном направлении. Зубчатые механизмы, в составе которых имеются подвижные оси зубчатых колес, называются эпициклическими. Зубчатое колесо z 2 (рис. 45), ось которого перемещается в пространстве, называется сателлитом. Зубчатое колесо z 1 (рис. 45), вокруг оси которого вращается сателлит, называется солнечным или центральным. Звено Н (рис. 45), которое несет на себе ось сателлита, называется водилом.
Рис. 45
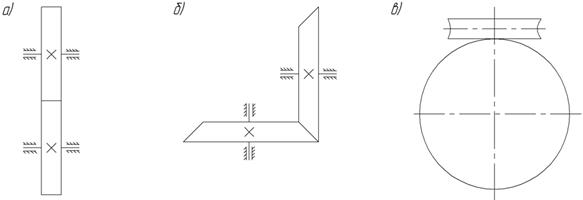
Планетарным называется эпициклический механизм, имеющий степень подвижности, равную единице. Дифференциальным называется эпициклический механизм, имеющий степень подвижности больше единицы. Цилиндрические зубчатые передачи – это передачи с параллельными осями колес (рис. 46а). Конические зубчатые передачи – это передачи с пересекающимися осями колес (рис. 46б). Гиперболоидные зубчатые передачи – это передачи с перекрещивающимися осями колес (рис. 46в).
Рис. 46
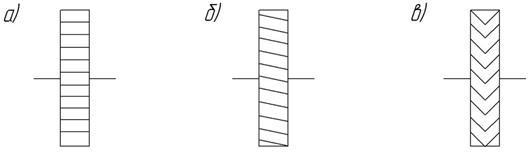
Прямозубыми называются колеса, у которых направление каждого зуба совпадает с образующей начальной поверхности (рис. 47а). Косозубыми называются колеса, у которых направление каждого зуба составляет постоянный угол с образующей начальной поверхности (рис. 47б). Шевронными называются колеса, у которых зубчатый венец образуется из двух рядов косых зубьев противоположного направления (рис. 47в).
Рис. 47
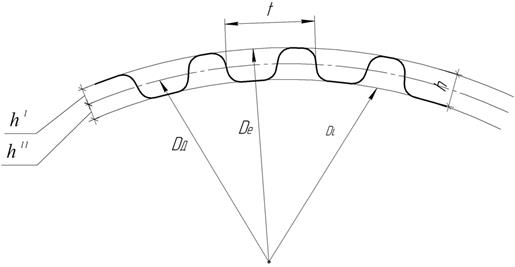
Элементы зубчатого колеса
Рис. 48
Шагом зацепления называется расстояние t (рис. 48) между одинаково расположенными точками двух соседних зубьев, измеренное по делительной окружности. Линия пересечения боковой поверхности зуба с плоскостью, перпендикулярной к оси вращения колеса, называется профилем зуба. Окружность наибольшего диаметра (проходящая через вершины зубьев) называется окружностью вершин (D е). Окружность, ограничивающая тело зубчатого колеса от стороны его зубьев, называется окружностью впадин (Di). Делительной окружностью называется окружность, которая делит зуб на две части (D д). Часть зуба, заключенная между делительной окружностью и окружностью впадин, называется ножкой зуба (h II). Часть зуба, заключенная между делительной окружностью и окружностью выступов, называется головкой зуба (h I). Расстояние h между окружностью вершин и окружностью впадин называется высотой зуба. Модулем зубчатого зацепления называется часть диаметра делительной окружности, приходящаяся на один зуб (m). Размеры зубчатого колеса, выраженные через модуль 1. Высота головки зуба h I = m 2. Высота ножки зуба h II = 1,25 m 3. Высота зуба h = 2,25 m 4. Шаг зацепления t = π m 5. Диаметр делительной окружности D д = mz 6. Диаметр окружности вершин зубьев D е = m (z + 2) 7. Диаметр окружности впадин Di = m (z – 2,5) Передаточным отношением называется отношение угловой скорости ведущего звена к угловой скорости ведомого звена (i). i
Динамика механизмов и машин Силы инерции Движущие силы – это силы, приложенные к ведущему звену механизма и совершающие механическую работу. Силы полезного сопротивления Q – это силы сопротивления, совершающие работу, требуемую от механизма. Силы вредного сопротивления F – это силы, приложенные к звеньям механизма и совершающие отрицательную работу (не являющуюся работой полезных сопротивлений, которая также отрицательна). Силы вредных сопротивлений делятся на силы трения и силы сопротивления среды. Силы тяжести С – вес самой машины и вес ее звеньев. Силы инерции Р и – силы обратного воздействия ускоряемого тела на тела, вызывающие его ускорение Р и = – m а, где m – масса тела; а – ускорение центра тяжести. Реактивные силы R (или просто реакции) – силы, возникающие в кинематических парах и представляющие собой давление звеньев друг на друга. Силовой анализ Определение реактивных и движущих сил носит название силового анализа механизма. Приведенной силой Р пр называется сила, условно приложенная к одной из точек механизма, работа которой на ее элементарном перемещении равна сумме работ всех реальных сил на их элементарных перемещениях. Уравновешивающей силой Р ур называется сила, равная приведенной, но противоположно направленная.
|
||||
|
|
Последнее изменение этой страницы: 2020-11-11; просмотров: 145; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.97.161 (0.008 с.) |

 ;
;
 ;
;