
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Адаптивная дифференциальная ИКМСтр 1 из 8Следующая ⇒
Содержание
Введение 1. Обзор методов сжатия речи 1.1 Избыточность речи 1.2 Импульсно-кодовая модуляция 1.3 Дельта-модуляция 1.3.1 Линейная дельта-модуляция 1.3.2 Адаптивная дельта-модуляция 1.4 Дифференциальная ИКМ 1.5 Адаптивная дифференциальная ИКМ 2. Анализ технического задания 2.1 Выбор метода сжатия речи 2.2 Механизм речеобразования 2.3 Кодирование речевых сигналов на основе линейного предсказания 2.3.1 Методы анализа на основе линейного предсказания 2.3.2 Выбор метода вычисления коэффициентов предсказания 2.3.3 Автокорреляционный метод 2.3.4 Вычисление коэффициента усиления модели 3. Выбор и обоснование структурной схемы модуля сжатия речевых сигналов 4. Выбор и обоснование принципиальной схемы модуля сжатия речевых сигналов 5. Разработка алгоритма программы 6. Экспериментальные исследования 6.1 Методика проведения эксперимента 6.2 Результаты эксперимента 7. Разработка конструкции модуля сжатия речевых сигналов Заключение Список использованных источников Введение
Методы цифровой обработки и передачи речевых сигналов в настоящее время интенсивно развиваются. Это, прежде всего, обусловлено прогрессом в области цифровой микросхемотехники, благодаря которому появилась реальная возможность изготовления сложной аппаратуры передачи сообщений, а также цифровых устройств распознавания речи, синтеза речи и др. Первые образцы таких устройств, уже освоенные промышленностью, вызвали повышенный интерес разработчиков к открывающимся возможностям и привлекли новых приверженцев этого направления исследований к изучению современных методов и алгоритмов цифровой обработки речи. Обработка речевого сигнала предполагает в первую очередь формирование описания на основе некоторой модели с последующим преобразованием полученного представления в требуемую форму. Последним шагом в процессе обработки является выделение и использование информационного содержания сигнала. Следует заметить, что конечная цель цифровой обработки сигналов такая же, как и при аналоговой обработке. Поэтому цифровые методы обработки требуют специального изучения в рамках общих методов обработки сигнала. Для этого имеется ряд серьезных причин. Первая, и возможно наиболее важная, заключается в том, что использование цифровых методов позволяет реализовать достаточно сложные алгоритмы обработки. Это также связано с успешным развитием технологии изготовления цифровых устройств. Цифровые системы надежны и компактны. Технология производства интегральных схем достигла в настоящее время такого уровня, когда сложнейшая система обработки может быть реализована в виде одной микросхемы. Скорость выполнения логических операций в микросхемотехнике столь высока, что в большинстве случаев системы обработки речевых сигналов могут функционировать в реальном масштабе времени.
Основная задача обработки и передачи речи - создание систем низкоскоростной передачи с высоким качеством восприятия сигнала, способных функционировать в реальных условиях. Одной из ключевых проблем ресурсосберегающего развития телефонных сетей является сокращение избыточности речевого сигнала. Решение этой проблемы позволит в условиях заданного критерия качества связи увеличить пропускную способность линейных трактов и каналов передачи. Именно для сокращения избыточности и предназначено разрабатываемое устройство - модуль сжатия речевых сигналов цифровой АТС. Уменьшение скорости передачи речевого сигнала (РС) с 64кбит/с до 7,8кбит/с, при сохранении достаточно хорошего качества восприятия речи, позволяет увеличить время, отводимое для записи сообщений в системе “голосовой почты" в цифровой АТС. Применение данного устройства позволит увеличить время записи сообщений примерно в восемь раз по сравнению с аналогом, в котором сигнал записывается без предварительного сжатия. Обзор методов сжатия речи Избыточность речи
Анализ речевых сигналов показывает, что при переходе от одного дискрета к другому проявляется значительная избыточность. В действительности коэффициент корреляции (мера предсказуемости) между соседними дискретами, следующими с частотой 8 кГц, составляет в общем случае 0.85 или больше. Все методы аналого - цифрового преобразования, описанные в последующей части этого раздела, с целью уменьшения скорости передачи приспособлены в той или иной степени к характеристикам речевых сигналов.
В дополнение к корреляции, существующей между соседними дискретами речевого сигнала, для уменьшения скорости передачи кодированного сигнала можно использовать и несколько других видов избыточности. Они перечислены в табл.1.1.
Таблица 1.1 Виды избыточности речевого сигнала
Неравномерное распределение амплитуд предполагает использование некоторых видов адаптивной регулировки усиления. Это обусловлено тем, что дискреты с меньшими значениями встречаются чаще, чем дискреты с большими значениями. Корреляция между дискретами речи - кодируется только разность между соседними дискретами. Результаты измерений разностей накапливаются затем в декодере для восстановления сигнала. Корреляция, связанная с периодичностью в сигнале объясняется тем, что в любой конкретный момент времени определенные звуки могут быть построены только из колебаний нескольких основных частот. Поэтому наблюдается сильная корреляция между большим числом дискретов, относящихся к нескольким периодам колебаний. Корреляция между периодами основного тона - следствие долговременной периодичности, относящейся к основному тону. Кодируются звонкие отрезки речи на одном периоде основного тона и результаты этого кодирования используются как шаблон для последующих периодов основного тона в этом звуке. Избыточность, связанная с неактивностью речи (паузы) определяется достаточно большой длительностью пауз в разговоре (около 60%). Кодирование заключается в определении речевой активности и освобождении канала по завершению каждого отрезка речи. При рассмотрении вопросов применения цифровой обработки речевых сигналов к задачам связи следует выделить два основных способа кодирования речевых сигналов: формы и параметров (вокодерные методы). Кодирование формы речевого сигнала основано на сохранении формы колебания в процессе дискретизации и квантования. Параметрическое представление базируется на описании речевого сигнала, как выходного отклика модели речеобразования. На первом этапе построения параметрического представления речевое колебание подвергается дискретизации и квантованию, а затем обрабатывается для получения модели. Параметры модели обычно разделяются на параметры возбуждения и параметры голосового тракта. Согласно рекомендациям МККТТ и требованиям ЕАСС (ВСС) полоса частот преобразуемого речевого сигнала ограничивается интервалом частот 0,3…3,4 кГц, а частота дискретизации при ИКМ в соответствии с теоремой отсчетов принимается равной f Д =8 кГц. Шкала уровней квантования рассчитывается таким образом, чтобы перекрыть весь диапазон изменения мгновенных значений выходного сигнала. Эта шкала может быть равномерной или неравномерной, фиксированной или адаптивно изменяемой в зависимости от параметров РС.
Импульсно-кодовая модуляция
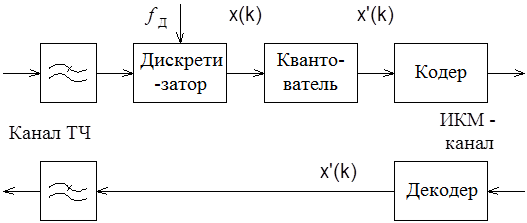
Избыточность при обычном, ИКМ - кодировании указывает на возможность значительной экономии полосы передачи. Этот вид модуляции основан на дискретизации, квантовании отсчетов и кодировании номера уровня квантования (рис.1.1) /1/. Аналоговый сигнал после фильтрации преобразуется в последовательность узких импульсов, модулированных по амплитуде. Полученный АИМ - сигнал квантуется по величине с использованием равномерной, неравномерной или адаптивно изменяемой шкалы квантования. Конкретное квантованное значение речевого сигнала преобразуется в кодовое слово, которое характеризуется числом разрядов и алфавитом символов. В основном цифровом канале используется ИКМ с А или - законом компандирования. Здесь восьмиразрядное двоичное кодовое слово отображает: знак (полярность) отсчета, трехразрядный номер сегмента характеристики компандирования и четырехразрядный номер уровня квантования в данном сегменте. Могут быть предусмотрены дополнительные меры для повышения помехоустойчивости кодовых слов по отношению к цифровым ошибкам в тракте передачи. Структурная схема кодека ДИКМ
Рис.1.1 Дельта-модуляция
Примером простого применения разностного квантования является дельта - модуляция (ДМ) /1/. В системах такого типа частота дискретизации выбирается во много раз больше, чем частота Котельникова. В результате соседние отсчеты оказываются в большой степени коррелированными. В системе с дельта - модуляцией используется простой одноразрядный (двухуровневый) квантователь. Таким образом, скорость передачи при использовании ДМ численно равна частоте дискретизации. Линейная дельта-модуляция В этом случае квантователь имеет только два уровня и шаг квантования фиксирован. Положительный уровень квантования соответствует c (n) =0, а отрицательный c (n) =1. Таким образом, согласно /1/,
Если крутизна входного сигнала максимальна, то для того, чтобы последовательность отсчетов
Иначе восстановленный сигнал будет “отставать” от исходного. Поскольку максимальная крутизна
Шаг квантования определяет также и максимальную ошибку, когда крутизна мала. Например, если сигнал на входе равен нулю (канал не занят), сигнал на выходе квантователя представляет собой переменную последовательность нулей и единиц, что приводит к флуктуации восстановленного сигнала вокруг нулевого или иного постоянного уровня с размахом Адаптивная дельта-модуляция Известен ряд методов адаптивной дельта - модуляции (АДМ) /1/. Большинство этих методов основано на адаптации по выходу, когда шаг квантования перестраивается по выходной последовательности кодовых слов. Подобное построение кодеков АДМ обладает тем преимуществом, что не требует синхронизации по кодовым словам, поскольку при отсутствии ошибок шаг квантования, как передатчика, так и приемника перестраивается в одной и той же кодовой последовательности. Поскольку минимальный шаг квантования может быть сделан значительно меньше, чем тот, который необходим для оптимальной работы линейного дельта - модулятора, шум дробления может быть существенно уменьшен. Аналогично максимальный шаг квантования можно сделать большим, чем максимальная крутизна входного сигнала, что приведет к уменьшению шума перегрузки по крутизне. Улучшение качества систем АДМ достигнуто путем ее незначительного усложнения. Поскольку адаптация осуществляется по выходному потоку двоичных символов, система АДМ сохраняет основное преимущество систем с дельта - модуляцией, т.е. не требует синхронизации по кодовым словам. По сути, дельта - модулятор представляет собой систему с дифференциальной ИКМ (ДИКМ). Дельта - модулятор также можно назвать одноразрядной системой с ИКМ. В общем случае, однако, термин “разностная ИКМ" применяется по отношению к системам, в которых квантователь имеет более двух уровней квантования. Дифференциальная ИКМ
Дифференциальная ИКМ основана на нелинейном отслеживании за передаваемым сигналом. В кодере можно выделить цепь обратной связи, где используется местный декодер. Из выходного цифрового сигнала формируется сигнал (оценка, копия), сравниваемый с исходным передаваемым сигналом (рис.1.2). Сигнал разности после дискретизации квантуется и по знаку, и по величине, после чего формируются двоичные символы или кодовые слова цифрового сигнала. В отличие от случая ИКМ при дифференциальной ИКМ квантованию подвергается не сам исходный сигнал, а разность между ним и результатом предсказания, формируемым на выходе предсказателя. Погрешность квантования этой разности, определяемая используемым в кодере квантователем, характеризует различие между исходным сигналом и его квантованной копией (аппроксимирующим сигналом) на выходе предсказателя. речевой сигнал сжатие модуль На приемной стороне из принятого цифрового сигнала аналогичным образом формируется квантованный аппроксимирующий сигнал, который после низкочастотной фильтрации и усиления поступает на выход телефонного канала.
Структурная схема кодека ДИКМ
Рис.1.2
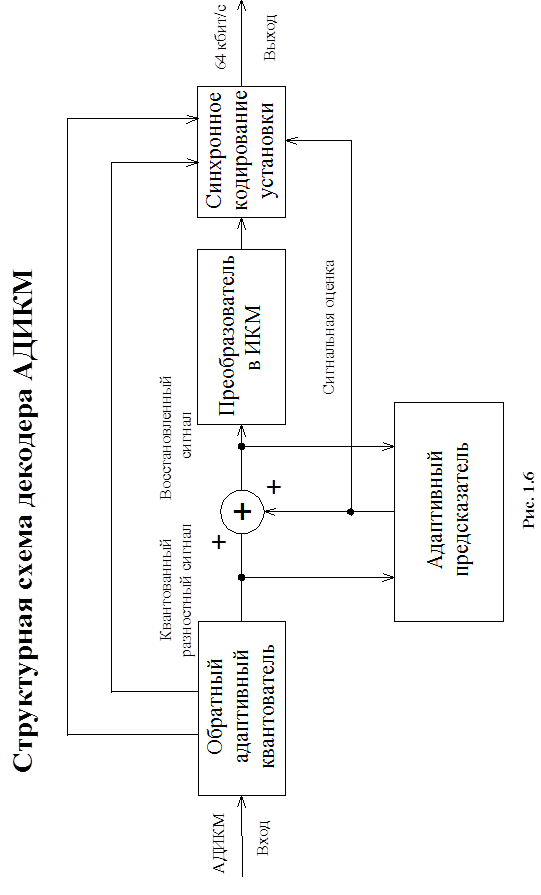
Декодер АДИКМ На рис.1.6 представлена структурная схема декодера АДИКМ /2,3/. Функции многих блоков декодера и кодера сходны. Т.о. функции обратного адаптивного квантователя, квантователя коэффициента масштабирования адаптации, адаптивного предсказателя и восстановителя сигнала описаны ранее при рассмотрении структуры кодера. Сначала выполняется преобразование сигнала из A - или -закона sp (k) в стандартную ИКМ - сигнал stx (k) и затем обрабатывается разностный сигнал dx (k):
dx (k) = slx (k) se (k).
Разностный сигнал dx (k) - затем сравнивается с квантованным АДИКМ сигналом и, выносится решение на интервале сигнала. Сигнал sd (k) (sd (k) - выходное кодовое слово ИКМ декодера) - затем определяется следующим образом: s+p (k) - ИКМ кодовое слово, которое представляет наибольший положительный выходной уровень ИКМ (когда sp (k) представляет наибольший положительный выходной уровень - s+p (k): - ограничивается, и принимается за sp (k)), s - p (k) - кодовое слово ИКМ, которое представляет наибольший отрицательный выходной уровень ИКМ (когда sp (k) представляет наибольший отрицательный выходной уровень - s-p (k): - ограничивается, и принимается за sp (k)). Т.о. можно видеть, что многие функции кодера и декодера сходны, поэтому их рассмотрение производится не будет.
2. Анализ технического задания
Выбор метода сжатия речи
Рассмотрев основные методы сжатия речевых сигналов сделаем следующие выводы: 3) ИКМ является стандартом цифровой телефонии. Она позволяет передавать речь со скоростью 64 кбит/с. Остальные разновидности методов сжатия речевого сигнала используют импульсно - кодовую модуляцию в качестве исходной (стандарт G703). 4) Адаптивная дельта модуляция позволяет передавать речь со скоростью 32 кбит/с. 5) Адаптивная дифференциальная ИКМ дает скорости передачи 40, 32, 24 и 16 кбит/с (стандарт G726). Все приведенные методы кодирования формы речевого сигнала уже достаточно хорошо изучены и не дают скорости передачи менее 16 кбит/с, но обеспечивают достаточно хорошее качество принимаемого сигнала. Поэтому для получения значительно меньших скоростей передачи требуется разработка принципиально новых методов и подходов к передачи речи. Причем эти методы должны учитывать структуру и особенности речевого сигнала. Существуют и другие подходы к обработке и передаче речи, такие как, например, сжатие в частотной области, примером которого может служить: полосное кодирование, канальный вокодер, формантный вокодер. Скорость передачи речевого сигнала в вокодерах значительно ниже чем у рассмотренных ранее, но натуральность звучания меньше. Представителем кодирования параметров сигнала - является метод линейного предсказания. Он позволяет получить скорости передачи вплоть до 2.4 кбит/с. Он стандартизован МККТТ (G 728 - 16 кбит/с, G 729 - 8 кбит/с), существует федеральный стандарт США на скорость передачи 6.8 кбит/с. Из приведенных выше рассуждений можно сделать вывод: 6) кодирование формы сигнала обеспечивает хорошее качество, но высокую избыточность сигнала (высокую скорость передачи); 7) кодирование в частотной области (полосное кодирование, канальный вокодер, формантный вокодер) обеспечивает плохое качество передаваемой речи, но низкую скорость передачи; 8) кодирование параметров сигнала позволяет добиться хорошего качества при низкой скорости передачи данных. Следовательно, данный метод является наиболее приемлемым. Перспективно также использование подхода, применяемого в линейном предикативном кодировании, и в других приложениях, таких как: 9) компьютерный ответ голосом (т.к. требуются гораздо меньшие объемы памяти для хранения информации); 10)системы идентификации и верификации голоса диктора; 11)передача сообщений по сети Internet. Таким образом, в качестве метода, используемого для модуля сжатия речи, выберем метод кодирования параметров речевого сигнала с использованием линейного предсказания. 2.2 Механизм речеобразования
Звуки речи могут быть разделены на три четко выраженные группы по типу возбуждения /4/: 12)Вокализованные звуки образуются проталкиванием воздуха через голосовую щель, при котором периодически напрягаются и расслабляются голосовые связки и возникает квазипериодическая последовательность импульсов потока воздуха, возбуждающая голосовой тракт. К вокализованным звукам относятся все гласные и часть согласных звуков. 13)Невокализованные или фрикативные звуки генерируются при сужении голосового тракта в каком - либо месте (обычно в конце рта) и проталкивании воздуха через суженное место со скоростью, достаточно высокой для образования турбулентного воздушного потока. Таким образом, формируется источник широкополосного шума, возбуждающего голосовой тракт. К невокализованным звукам относят большую часть согласных звуков. 14)Взрывные звуки характеризуются полностью закрытым голосовым трактом (обычно в начале голосового тракта). Затем воздух внезапно высвобождается. Такое явление имеет место при произнесении звука [т]. Различные звуки образуются путем изменения формы голосового тракта. Таким образом, спектральные свойства речевого сигнала изменяются во времени в соответствии с изменением формы голосового тракта. Автокорреляционный метод Одним из способов определения пределов в (2.8) основан на предположении, что сигнал равен нулю вне интервала
где w (m) - окно конечной длительности, равное нулю вне интервала. Если sn (m) отличен от нуля только на интервале будет отлична от нуля на интервале
Заметим, что погрешность предсказания будет большой в начале интервала (т.е. Для вычисления коэффициентов предсказания необходимо решить систему линейных уравнений
Минимальный средний квадрат погрешности предсказания
Систему уравнений (2.12) можно записать в матричной форме. Матрица размером рxр является теплицевой, т.е. симметричной и такой, что элементы на любой диагонали равны между собой.
Внешн. шина адреса Внешн. шина данных Таймер Контроллер прерываний IDMA Контроллер PMA DMA PMD DMD Флаги Power Down Контроллер BDMA Контроллер Внешн. шина адреса Внешн. шина данных Таймер Контроллер прерываний IDMA Контроллер PMA DMA PMD DMD Флаги Power Down Контроллер BDMA Контроллер
Архитектура процессора ADSP2181 имеет высокую степень параллелеризма, отвечающую требованиям цифровой обработки сигналов. За один командный цикл процессор может выполнить следующие действия: 20)cгенерировать адрес новой команды; 21)осуществить выборку и дешифрацию следующей команды; 22)выполнить одно или два обращения к памяти; 23)обновить один или два указателя адреса данных; 24)выполнить вычисления; 25)передавать данные через последовательные порты; 26)передавать данные по DMA портам. Базовая архитектура процессора приведена на рис 4.1.
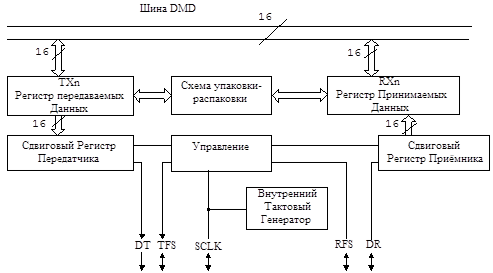
Вычислительные устройства непосредственно работают с 16 - битными данными и имеют аппаратную поддержку для работы с числами повышенной точности. АЛУ выполняет стандартный набор арифметических и логических операций, а также примитивы деления. МАС выполняет умножение за один цикл, а также операции умножения/вычитания. Устройство циклического сдвига производит арифметические и логические операции. В нем реализованы операции над числами в разных форматах, в том числе и надо числами с плавающей точкой, занимающих более одного слова. Вычислительные устройства организованны "бок о бок", а не последовательно, что позволяет результату работы любого устройства быть операндами любого другого устройства в следующем цикле. Шина внутренних результатов (R) прямо соединяет вычислительные устройства с этой целью. Все три вычислительных устройства содержат входные и выходные регистры, которые доступны через внутреннюю шину (DMD). Вычислительные устройства обычно берут операнды из входных регистров и помещают результат в выходной регистр. Эти регистры обеспечивают буферизацию между вычислительными устройствами и памятью. Шина внутренних результатов позволяет использовать результат предыдущего вычисления, используя непосредственно как операнд другой операции. Это исключает задержки в случае выполнения серий различных операций. Два выделенных генератора адресов данных DAG и многофункциональный счетчик команд обеспечивают эффективное использование вычислительных устройств. Генераторы адресов данных обеспечивают адреса памяти данных, когда данные пересылаются из выходных или во входные регистры. Каждый из двух генераторов запоминает до 4 адресных указателей. Когда указатель используется для косвенной адресации, он может автоматически модифицироваться значением в заданном регистре после исполнения инструкции. Имея 2 генератора адресов, процессор может генерировать 2 адреса за один цикл, что обеспечивает исполнение двухадресных инструкций. Программированный интервальный таймер, обеспечивающий периодическую генерацию прерываний.8-битный масштаб позволяет ему декрементировать содержимое 16-битного регистра-счетчика в диапазоне от каждого цикла до 256-го цикла процессора. Прерывание генерируется, когда регистр-счетчик обнуляется. Регистр-счетчик автоматически загружается из 16-битного регистра интервала и отсчет времени немедленно возобновляется. Данный процессор имеет два двунаправленных последовательных порта (SPORT) с двойной буферизацией. Эти порты используют синхронную передачу данных и используют кадровые сигналы, чтобы контролировать поток данных. Каждый порт может тактироваться от внутреннего таймера или от внешней частоты. Сигналы кадровой синхронизации могут меняться от 3 бит до 16. ADSP подключается к внешними устройствам через SPORT, рассмотрим его подробно. Последовательные порты. Для сопряжения с аппаратными средствами существует синхронные последовательные порты, или SPORT. SPORT поддерживает много последовательных протоколов обмена данными и могут обеспечить прямое соединение процессоров в многопроцессорной системе. В нашем случае для соединения ADSP с системной шиной и устройством управления. Каждый SPORT имеет пять интерфейсных линий: 27)SCLK Синхроимпульсы; 28)RFS Синхроимпульсы; 29)TFS Синхронизация приема кадра; 30)DT Передача данных; 31)DR Прием данных. SPORT получает данные через вход DR и посылает данные через вход DT. Для полнодуплексной работы он может одновременно посылать и принимать данные. Биты данных синхронизируются с синхроимпульсами SCLK. Линия SCLK является выходом, если процессор генерирует синхроимпульсы, и входом, если синхроимпульсы приходят извне. Сигналы синхронизации кадров RFS и TFS используются для индикации начала передачи слова или потока слов. Рис 4.2 показывает упрощенную блок-схему одного SPORT. Данные, подлежащие передаче, записываются из внутреннего регистра процессора в регистр RХ находящийся в SPORT, по шине DMD. Эти данные могут быть аппаратно упакованы, затем автоматически передаются в регистр сдвиговой передачи, биты из которого последовательно сдвигаются так, что они попадают на сигнал DT (синхронно с сигналом SCLK), начиная с младших бит. Приемная секция SPORT принимает данные с DR, синхронно с сигналом SCLK. Когда получено целое слово, данные могут быть автоматически распакованы, затем оно автоматически копируется в регистр RX, находящийся в SPORT, где эти данные доступны для процессора.
Блок схема последовательного порта
Рис.4.2
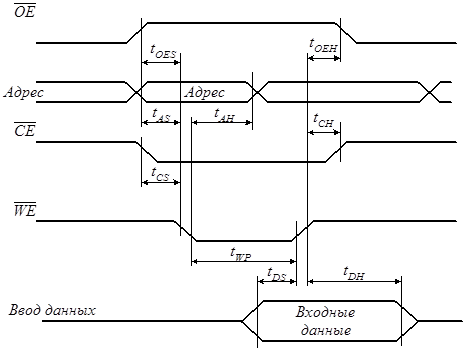
Рассмотрим возможности SPORT. Каждый SPORT имеет независимые секции приема и передачи (является двунаправленным). Каждая секция SPORT (и приемная, и передающая) имеет регистр данных для передачи слов данных в процессор, из процессора и регистр для сдвига посылаемых данных, получаемых данных (то есть имеет двойную буферизацию, что обеспечивает дополнительное время для обработки данных процессором). Каждый SPORT может использовать внешние синхроимпульсы c частотой от 0 Гц до 12.5 МГц или генерировать свои в широком диапазоне частот (до 1/2 частоты процессора). Каждый SPORT поддерживает длины последовательного слова от 3 до 16 бит. Каждая секция SPORT (и приемная, и передающая) может работать: 32)как с, так и без сигналов синхронизации кадра для прима/передачи каждого слова; 33)с внутренними или внешними кадровыми сигналами; 34)с активным высоким или активным низким кадровыми сигналами; 35)с нормальным или альтернативным режимом кадровой синхронизации. Каждый SPORT поддерживает аппаратное сжатие по А-закону или в соответствии с рекомендацией CCITT G.711. Автобуферизация с одним циклом задержки. С использованием DAG, SPORT может автоматически принять и/или передать целый кольцевой буфер, с затратой лишь одного цикла на переданное/полненное слово данных. Передачи данных между SPORT и кольцевым буфером происходят автоматически в этом режиме и не требуют дополнительного программирования. Прерывания: каждая секция SPORT (и приемная, и передающая) генерирует прерывание по завершению передачи/приема слова данных или целого буфера данных, если, используется режим автобуферизации. Многоканальные возможности: SPORTO может получать и передавать данные выборочно по каналам последовательного потока бит, мультиплексированного на 24 или 32 канала. В данном случае мы получаем возможность одновременного обслуживания до 24 или 32 каналов. Альтернативная конфигурация: SPORT1 может быть сконфигурирован как два внешних запроса на прерывание, IRQ0 и IRQ1, а также как два сигнала Flag In и Flag Out, вместо последовательного порта. Запись в регистр TX переводит SPORT в состояние готовности к передаче; сигнал TFS инициализирует передачу данных. Как только передача началась, каждое значение, записанное в регистр TX, передается во внутренний регистр передачи сдвигом, и биты данных последовательно посылаются, начиная с самого младшего. Каждый бит посылается по фронту сигнала SCLK. Как только младший бит слова послан, SPORT генерирует прерывание передачи. Регистр ТХ снова доступен для записи данных, хотя передача предыдущего слова только началась. В приемной секции, биты собираются по мере их прихода. Как только полное слово данных принято, SPORT записывает его в регистр RX и генерирует прерывание приема данных. Управление конфигурацией SPORT осуществляется установкой битов в конфигурационных регистрах. Конфигурационные регистры SPORT0 размещаются по адресам 0x3FF3-3FFA. Каждый SPORТ имеет регистры приема и передачи. Эти регистры недоступны по адресу памяти, зато они имеют ассемблерные мнемоники. Регистры для передачи данных называются TX0 и RX0 для SPORT0. SPORT0 должен быть сконфигурирован под ИКМ-32 с потоком 2048 Мбит/с. Применение в качестве ОЗУ данных ИС HY584000 фирмы Samsung позволяет обеспечить многократное считывание информации без ее разрушения. Особенностью данной микросхемы является перезапись информации при подаче на вход элемента напряжения низкого уровня. Это более удобно, так как обрыв вывода не создает на входе ИС напряжение активного уровня, что повышает надежность его работы. Данная ИС позволяет производить чтение - запись информации по одним и тем же выводам, что важно с точки зрения упрощения ИС. Выход ИС имеет три выходных состояния, т.е. информация подключается к выходным выводам только при выборе ИС. Приведем временные диаграммы управляющих сигналов, соответствующих процессу чтения из памяти (рис.4.3).
Диаграммы управляющих сигналов чтения из памяти Рис.4.3
В табл.4.3 приведены некоторые параметры управляющих сигналов чтения из памяти
Таблица 4.3 Параметры сигналов чтения из памяти
Приведем временные диаграммы управляющих сигналов, соответствующих процессу записи в память (рис.4.4).
Результаты эксперимента
Рис.6.2
На рис.6.2 и 6.3 представлены временные диаграммы исследуемых процессов.
Рис.6.3
Спектральные диаграммы входного воздействия (синусоидальный сигнал) (рис.6.4) и сигнала на выходе модуля сжатия речи (рис.6.5).
Рис.6.4
Рис.6.5
Рис.6.6
Спектральные диаграммы входного воздействия (треугольные импульсы) (рис.6.6) и сигнала на выходе модуля сжатия речи (рис.6.7).
Рис.6.7
Рис.6.8
Спектральные диаграммы входного воздействия (пилообразный сигнал) (рис.6.8) и сигнала на выходе модуля сжатия речи (рис.6.9).
Рис.6.9
Рис.6.10
Спектральные диаграммы входного воздействия (прямоугольные импульсы) (рис.6.10) и сигнала на выходе модуля сжатия речи (рис.6.11).
Рис.6.11
Рис.6.12
Спектральные диаграммы входного воздействия (шум) (рис.6.12) и сигнала на выходе модуля сжатия речи (рис.6.13).
Рис.6.13
Для приведенных на рис.6.2 и 6.3 графиков рассчитаем среднеквадратическое отклонение выходной кривой от входной и модуль отклонения по формулам
Для рис.6.2 (синусоидальное воздействие) получим В данной работе также представлены спектральные диаграммы следующих сигналов: пилообразные, прямоугольные импульсы, шум. По ним можно судить об изменении спектрального состава сигнала при прохождении через модуль сжатия речи. На всех спектральных диаграммах выходных сигналов можно видеть значительное обогащение спектра выходного сигнала по сравнению со спектром входного. Особенно это заметно на сигналах с короткими фронтами и спадами (пилообразные и прямоугольные импульсы), их длительность равна одному отсчету сигнала, а при частоте дискретизации Fд=44100 Гц, она составляет 22,68мкс. Такие значения фронтов и спадов не свойственны речевому сигналу, поэтому выходные временные диаграммы таких сигналов сильно искажены.
|
||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-02; просмотров: 780; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.142.174.55 (0.178 с.) |

 (на выходе кодера) возрастала так же быстро, как и последовательность
(на выходе кодера) возрастала так же быстро, как и последовательность  (на входе кодера) в области максимальной крутизны, необходимо потребовать выполнения неравенства
(на входе кодера) в области максимальной крутизны, необходимо потребовать выполнения неравенства .
. ограничивается шагом квантования, то возрастание или убывание последовательности
ограничивается шагом квантования, то возрастание или убывание последовательности  . Это вызывает т. н. шум дробления.
. Это вызывает т. н. шум дробления.
 /4/. Это удобно записать в виде
/4/. Это удобно записать в виде , (2.10)
, (2.10) , то соответствующая погрешность предсказания еn (m) для предсказателя порядка р
, то соответствующая погрешность предсказания еn (m) для предсказателя порядка р . В этом случае Еn имеет вид
. В этом случае Еn имеет вид . (2.11)
. (2.11) ), поскольку мы пытаемся предсказать сигнал по отсчетам, которые приравняли нулю. Погрешность будет большой и в конце интервала (т.е.
), поскольку мы пытаемся предсказать сигнал по отсчетам, которые приравняли нулю. Погрешность будет большой и в конце интервала (т.е.  ), поскольку здесь мы предсказываем нулевые значения по ненулевым. Поэтому в качестве окна w (m) в уравнении (2.10) используется окно, которое стремится к нулю на концах интервала.
), поскольку здесь мы предсказываем нулевые значения по ненулевым. Поэтому в качестве окна w (m) в уравнении (2.10) используется окно, которое стремится к нулю на концах интервала. ,
,  . (2.12)
. (2.12) . (2.13)
. (2.13)



 ,
, 












 ,
,  .
.
 ,
,  . Для рис.6.3 (треугольные импульсы) получим
. Для рис.6.3 (треугольные импульсы) получим  ,
,  . В расчете N=44, т.к. период составляют 44 отсчета сигнала (частота дискретизации Fд=44100 Гц, частота всех тестовых сигналов, приведенных в экспериментальном исследовании составляет f=1000 Гц).
. В расчете N=44, т.к. период составляют 44 отсчета сигнала (частота дискретизации Fд=44100 Гц, частота всех тестовых сигналов, приведенных в экспериментальном исследовании составляет f=1000 Гц).


