Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поиск и следование за инфракрасным маякомСодержание книги
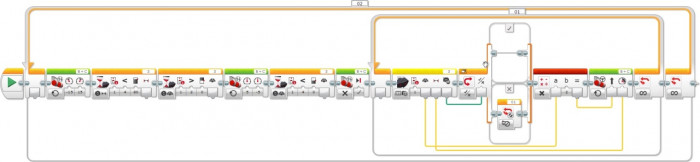
Поиск на нашем сайте Задача №21: написать программу поиска и следования за инфракрасным маяком. Решение: Настало время объединить знания, полученные в разделе 9.2. Поиск инфракрасного маяка и 9.3. Следование за инфракрасным маяком. Внутрь бесконечного цикла сначала поместим программу поиска маяка (Рис. 4), а затем - программу следования за маяком (Рис. 7). Получившуюся программу (Рис. 8) загрузим в робота и запустим на выполнение. Сначала наш робот будет вращаться на месте, пока не повернется в сторону инфракрасного маяка, а затем устремится в его сторону. Если маяк выключить, то робот остановится и снова начнет вращаться на месте, пока не обнаружит инфракрасный маяк. Задача решена!
Рис. 8 Урок №10 - Изучаем гироскопический датчик Конец формы Содержание урока Введение: Завершающий урок цикла "Первые шаги" посвятим изучению гироскопического датчика. Данный датчик, как и ультразвуковой, присутствует только в образовательной версии набора Lego mindstorms EV3. Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору. Изучаем гироскопический датчик Гироскопический датчик (Рис. 1) предназначен для измерения угла вращения робота или скорости вращения. Сверху на корпусе датчика нанесены две стрелки, обозначающие плоскость, в которой работает датчик. Поэтому важно правильно установить датчик на робота. Также для более точного измерения крепление гироскопического датчика должно исключать его подвижность относительно корпуса робота. Даже во время прямолинейного движения робота гироскопический датчик может накапливать погрешность измерения угла и скорости вращения, поэтому непосредственно перед измерением следует осуществить сброс в 0 текущего показания датчика. Вращение робота против часовой стрелки формирует отрицательные значения измерений, а вращение по часовой стрелке - положительные.
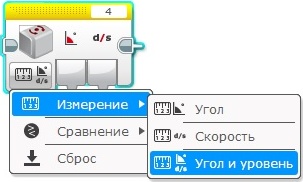
Рис. 1 Рассмотрим программный блок "Гироскопический датчик" (Рис. 2) Желтой палитры. Этот программный блок имеет три режима работы: "Измерение", "Сравнение" и "Сброс". В режиме "Измерение" можно измерить "Угол", "Скорость" или одновременно "Угол и скорость".
Рис. 2 Давайте закрепим гироскопический датчик на нашем роботе (Рис. 3), подсоединим его кабелем к порту 4 модуля EV3 и рассмотрим примеры использования.
Рис. 3 Задача №22: написать программу движения робота по квадрату с длиной стороны квадрата, равной длине окружности колеса робота. Решение: 1. Перед началом движения сбросим датчик в 0, используя программный блок "Гироскопический датчик" Желтой палитры; 2. Мы уже знаем: чтобы проехать прямолинейно требуемое расстояние - необходимо, воспользовавшись программным блоком "Независимое управление моторами", включить оба мотора на 1 оборот. 3. Для поворота робота на 90 градусов в этот раз воспользуемся гироскопическим датчиком: 1. используя программный блок "Независимое управление моторами", заставим робота вращаться вправо вокруг своей оси; 2. используя программный блок "Ожидание" в режиме "Гироскопический датчик", будем ждать, пока значение угла поворота не достигнет 90 градусов; 3. Выключим моторы; 4. Используя программный блок "Цикл" в режиме "Подсчет", повторим шаги 1 - 3 четыре раза. Попробуйте решить Задачу №22 самостоятельно, не подглядывая в решение. Решение Задачи №22 "Первые шаги" - послесловие Десятый урок завершает курс "Первые шаги". На протяжении всех уроков вы познакомились с конструктором Lego mindstorms EV3, со средой программирования, научились использовать моторы и датчики. Если вы успешно одолели курс "Первые шаги", то впереди вас ждет знакомство с решением популярных задач робототехники в рамках курса "Практика". Удачи! Урок №11 - Кегельринг Конец формы Содержание урока Введение: Раздел "Практика" являет собой продолжение курса "Первые шаги". На протяжении ряда уроков мы разберем решение базовых задач робототехники., научимся получать и обрабатывать информацию от нескольких датчиков. Надеемся, что полученные знания помогут вам в дальнейшем при самостоятельном решении творческих и соревновательных задач. Урок №11 посвятим разбору соревновательной дисциплины под названием "Кегельринг". Правила соревнования. Подготовка поля для проведения соревнований. Основные правила "Кегельринга" довольно просты: необходимо собрать и запрограммировать робота, который выталкивает кегли за пределы ринга. Кеглями, как правило, выступают жестяные банки емкостью 0,33 л, а роль ринга выполняет белое поле, ограниченное черной окружностью с шириной линии 50 мм. С одним из вариантов регламента проведения соревнования можете ознакомиться под спойлером ниже: Регламент соревнований роботов "Кегельринг" по версии сайта myROBOT.ru Итак: для проведения соревнования нам понадобится поле, точно такое же, которое мы использовали при решении Задачи №12 Урока №6 курса "Первые шаги". Вы можете скачать макет подходящего поля на странице "Макеты полей для тренировки и соревнований" нашего сайта, а затем распечатать его в цифровой типографии на баннерной ткани, либо изготовить поле самостоятельно, используя плакатную бумагу подходящего размера, большой циркуль, линейку и черную тушь. Жестяные банки лучше всего обклеить по периметру самоклеящейся бумагой (нам понадобятся 2 - 4 банки белого цвета и столько же - черного). Реквизит для урока готов!
|
||
|
|
Последнее изменение этой страницы: 2019-12-15; просмотров: 374; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.220 (0.006 с.) |