Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Урок №8 - Начинаем изучать инфракрасный датчикСодержание книги
Поиск на нашем сайте
Конец формы Содержание урока Введение: Инфракрасный датчик входит домашнюю версию набора Lego mindstorms EV3. Это единственный датчик, который может применяться как самостоятельно, так и в паре с инфракрасным маяком, тоже являющимся частью домашнего набора. Следующие два урока мы посвятим изучению этих двух устройств, а также их взаимодействию между собой. Изучаем инфракрасный датчик и инфракрасный маяк Инфракрасный датчик (Рис. 1) в своей работе использует световые волны, невидимые человеку - инфракрасные волны *. Такие же волны используют, например, дистанционные пульты управления различной современной бытовой техникой (телевизорами, видео и музыкальными устройствами). Инфракрасный датчик в режиме "Приближение" самостоятельно посылает инфракрасные волны и, поймав отраженный сигнал, определяет наличие препятствия перед собой. Еще два режима работы инфракрасный датчик реализует в паре с инфракрасным маяком (Рис. 2). В режиме "Удаленный" инфракрасный датчик умеет определять нажатия кнопок инфракрасного маяка, что позволяет организовать дистанционное управление роботом. В режиме "Маяк" инфракрасный маяк посылает постоянные сигналы, по которым инфракрасный датчик может определять примерное направление и удаленность маяка, что позволяет запрограммировать робота таким образом, чтобы он всегда следовал в сторону инфракрасного маяка. Перед использованием инфракрасного маяка в него необходимо установить две батарейки AAA.
Рис. 1
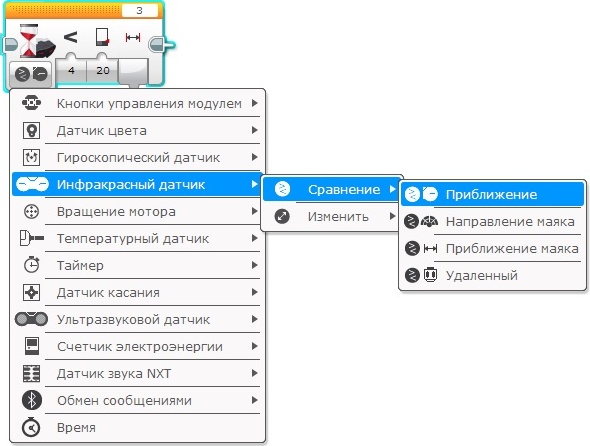
Рис. 2 8.2. Инфракрасный датчик. Режим "Приближение" Этот режим работы инфракрасного датчика похож на режим определения расстояния ультразвуковым датчиком. Разница кроется в природе световых волн: если звуковые волны отражаются от большинства материалов практически без затухания, то на отражение световых волн влияют не только материалы, но и цвет поверхности. Темные цвета в отличие от светлых сильнее поглощают световой поток, что влияет на работу инфракрасного датчика. Диапазон работы инфракрасного датчика также отличается от ультразвукового - датчик показывает значения в пределах от 0 (предмет находится очень близко) до 100 (предмет находится далеко или не обнаружен). Еще раз подчеркнем: инфракрасный датчик нельзя использовать для определения точного расстояния до объекта, так как на его показания в режиме "Приближение" оказывает влияние цвет поверхности исследуемого предмета. В свою очередь это свойство можно использовать для различия светлых и темных объектов, находящихся на равном расстоянии до робота. С задачей же определения препятствия перед собой инфракрасный датчик справляется вполне успешно. Решим практическую задачу, похожую на Задачу №14 Урока №7, но, чтобы не повторяться, усложним условие дополнительными требованиями. Задача №17: написать программу прямолинейно движущегося робота, останавливающегося перед стеной или препятствием, отъезжающего немного назад, поворачивающего на 90 градусов и продолжающего движение до следующего препятствия. У робота, собранного по инструкции small-robot-31313, впереди по ходу движения установлен инфракрасный датчик. Соединим его кабелем с портом "3" модуля EV3 и приступим к созданию программы. Рассмотрим программный блок "Ожидание" Оранжевой палитры, переключив его в Режим: "Инфракрасный датчик" - "Сравнение" - "Приближение" (Рис. 3). В этом режиме программный блок "Ожидание" имеет два входных параметра: "Тип сравнения" и "Пороговое значение". Настраивать эти параметры мы уже умеем.
Рис. 3 Решение: 1. Начать прямолинейное движение вперед 2. Ждать, пока пороговое значение инфракрасного датчика станет меньше 20 3. Прекратить движение вперед 4. Отъехать назад на 1 оборот двигателей 5. Повернуть вправо на 90 градусов (воспользовавшись знаниями Урока №3, рассчитайте необходимый угол поворота моторов) 6. Продолжить выполнение пунктов 1 - 5 в бесконечном цикле. Попробуйте решить Задачу № 17 самостоятельно, не подглядывая в решение. Решение Задачи №17 А теперь для закрепления материала попробуйте адаптировать решение Задачи №15 Урока №7 к использованию инфракрасного датчика! Получилось? Поделитесь впечатлениями в комментарии к уроку...
|
||||
|
|
Последнее изменение этой страницы: 2019-12-15; просмотров: 199; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.78.184 (0.007 с.) |