Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Блок математика, блок округлениеСодержание книги
Поиск на нашем сайте
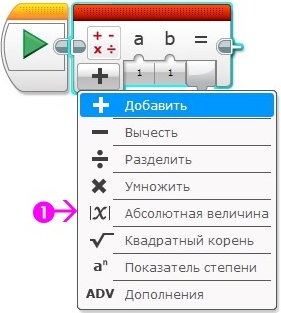
Для выполнения математических вычислений служит программный блок "Математика". Он позволяет выполнить выбранную математическую операцию (Рис. 4 поз. 1) над двумя числами, заданными параметрами "a" и "b". В режимах "Абсолютная величина" и "Квадратный корень" для вычисления доступен только один параметр "a".
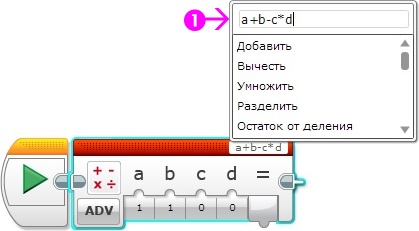
Рис. 4 Отдельно следует остановиться на режиме "Дополнения". В этом режиме количество параметров для расчета увеличивается до четырех: "a", "b", "c" и "d". В параметр "Уравнение" (Рис. 5 поз. 1) можно вписать любую произвольную формулу, производящую вычисления с этими параметрами.
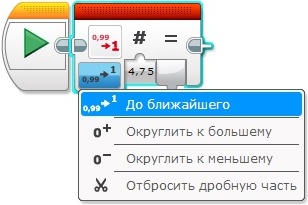
Рис. 5 Иногда возникает необходимость произвести округление результата вычисления. Например: при отладке программы, можно выводить на экран модуля EV3 округленные промежуточные расчеты, чтобы легче было визуально контролировать ход выполнения программы. Для этого предназначен программный блок "Округление" (Рис. 6). Режимы "До ближайшего", "Округлить к большему" и "Округлить к меньшему" производят округление до целого значения. В режиме "Отбросить дробную часть" можно задать количество остающихся знаков дробной части после запятой.
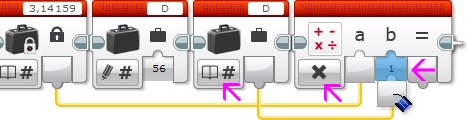
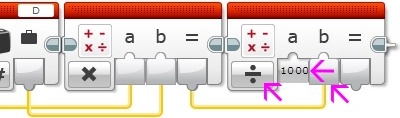
Рис. 6 Примеры выполнения вычислений в программе Настало время применить полученные знания на практике. Задача №4: необходимо написать программу прямолинейного движения для проезда роботом расстояния в 1 метр. Решение: За один полный оборот мотора робот проезжает расстояние, равное длине окружности колеса. Это расстояние можно найти, умножив число Пи (=3,14159) на диаметр колеса. Диаметр колеса из образовательного набора Lego mindstorms EV3 равен 56 мм, а - из домашнего набора Lego mindstorms EV3 равен 43,2 мм. Если переведем расстояние в 1 метр в миллиметры (1000 мм) и разделим на расстояние, которое робот проходит за один оборот мотора, то узнаем: сколько оборотов мотора необходимо для проезда всего заданного расстояния.
Рис. 7 Приступим к созданию программы: 1. Используя программный блок "Константа", заведем в программу постоянное число Пи, равное примерно 3,14159. 2. Используя программный блок "Переменная", создадим в программе переменную D и занесем в нее значение диаметра колеса в зависимости от используемого конструктора (если вы использовали другие колеса, то самостоятельно измерьте диаметр и внесите значение в программный блок). 3. Используя программный блок "Математика", умножим значение блока "Константа" на значение переменной D. Для передачи значения из переменной D в программный блок "Математика" используем второй программный блок "Переменная" в режиме "Считывание"! (Для передачи значений между программными блоками используются шины данных. Чтобы установить шину данных, необходимо "потянуть" выходной параметр одного программного блока и "присоединить" его к входному параметру другого программного блока) 4. Используя программный блок "Математика", разделим значение пути (1000 мм) на значение, полученное в шаге 3. 5. Полученное в шаге 4 значение. округлив до двух знаков после запятой, выведем на экран модуля EV3. 6. Полученное в шаге 4 значение подадим в параметр "Обороты" блока "Рулевое управление". Загрузим полученную программу в нашего робота. Поставим робота на ровную свободную площадку и запустим программу. Измерив расстояние, пройденное роботом, убедимся в правильности нашей программы!
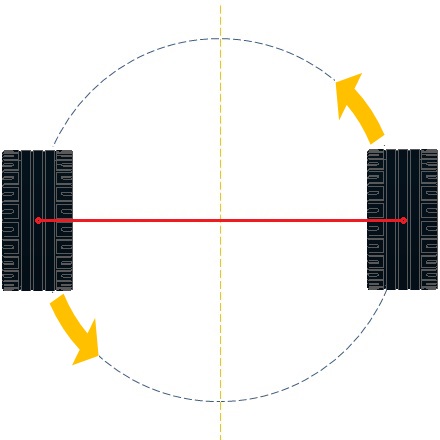
Задача №5: необходимо написать программу, рассчитывающую значение параметра "Градусы" для разворота нашего робота (Урок №2, Задача №1) Данная задача имеет сходство с предыдущей - нам только требуется найти расстояние, которое должны проехать колеса нашего робота. Для того, чтобы наш робот развернулся на 180 градусов - необходимо, чтобы правое и левое колеса, проехав определенный путь по окружности, поменялись местами. Как видим из Рис. 8 - каждое колесо при этом проедет ровно половину окружности с диаметром, равным расстоянию между центрами колес (красная линия на Рис. 8). Подходящей линейкой померяем расстояние между центрами колес. Для робота, собранного по инструкции small-robot-45544, это расстояние равно 120 мм. Следовательно, умножив это значение на число Пи (3,14159) и разделив на 2, мы найдем расстояние, которое должно проехать каждое из колес нашего робота. Как найти соответствующее этому расстоянию число оборотов мотора - мы разобрали в Задаче 4 данного урока. Для того, чтобы перевести полученное число оборотов в градусы - вспомним соотношение: 1 оборот мотора = 360 градусов. Следовательно, если мы, воспользовавшись программным блоком "Математика", умножим полученное значение оборотов на 360 и подадим результат в параметр "Градусы" программного блока "Независимое управление моторами" (Урок №2 Рис.7 поз. 2), то решим требуемую задачу.
Рис. 8 Попробуйте написать программу для решения задачи №5 самостоятельно, не подглядывая в решение! Решение Задачи №5
|
||||
|
|
Последнее изменение этой страницы: 2019-12-15; просмотров: 313; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.156.84 (0.006 с.) |