Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Параметрическая настройка динамических систем с помощью пакета Simulink Response optimizationСодержание книги
Поиск на нашем сайте
Пакет Simulink Response Optimization (SRO) предназначен для параметрической оптимизации линейных и нелинейных систем. Он интегрирован с приложением SIMULINK и по существу является его дополнением. Для решения задач оптимизации САУ в пакете SRO используются алгоритмы нелинейного программирования. В состав MATLAB 7.1 входит версия 2.3 пакета SRO. От предыдущих версий она отличается усовершенствованием алгоритмов оптимизации. Однако принципы работы с программой SRO остались без изменений, потому в дальнейшем на номер версии ссылок не будет. В SRO для оценки качества САУ используются всего три блока: • CRMS (Continuous root mean square); • DRMS (Discrete root mean square); • Signal Constraint. !! Запустите SIMULINK, найдите в библиотеке пакет Simulink Response Optimization и просмотрите его содержимое. Блок CRMS реализует математическую зависимость:
где e(t), x(t) - соответственно вход и выход блока. Блок DRMS реализует дискретный вариант указанной выше зависимости:
Обычно оба критерия настройки используют для оценки САУ по ее среднеквадратичной ошибке. Блок Signal Constraint является основным блоком. Он имеет свое рабочее окно и позволяет в интерактивном режиме выполнять следующие операции: • устанавливать необходимые ограничения во временной области на переходный процесс; • устанавливать настраиваемые параметры; • указывать неопределенные параметры; • осуществлять параметрическую оптимизацию системы c заданными ограничениями. • Подготовка САУ к параметрической оптимизации
Методику подготовки САУ к параметрической оптимизации с помощью пакета SRO рассмотрим на основе примера следящей системы, структура которой приведена на рис. 4.1.
Рис. 4.1. Структурная схема следящей системы
Здесь Kр = 10, Ku = 40, K0 = 2, Kд = 0,25, τ1 = 0,8 с, τ2 = 0,5 с, τ3 = 0,12 с, τ4 = 0,00625 с, Т01 = 0.1 с, Т02 = 0,02 с, Т03 = 0,01 с; предельные значения сигнала U равны ±50В. При этом значение K0 нестабильно и может изменяться в пределах ±10% относительно его номинального значения. Необходимо подобрать параметры корректирующего устройства таким образом, чтобы перерегулирование не превышало 20%, а время переходного процесса 0,8 с. На первом этапе требуется собрать в среде SIMULINK схему моделирования динамической системы. При этом в качестве параметров исследуемых или настраиваемых звеньев целесообразно ввести их идентификаторы.
!! Постройте S-модель САУ, приведенную на рис. 4.1. Введите численные значения параметров Ku, Kд, Т01, Т02, Т03, ограничения по выходному напряжению усилителя U и значение входного воздействия Далее через командную строку MATLAB требуется ввести численные значения параметров звеньев системы, представленных в S-модели в виде коэффициентов передач и постоянных времени. !! Введите через командную строку MATLAB параметры S-модели, заданной в виде идентификаторов. Проверьте работоспособность созданной S-модели по виртуальному осциллографу, установив время моделирования 2 с. Такая S -модель для анализа более удобна, так как в ней можно легко изменять численные значения коэффициентов и постоянных времени звеньев САУ. Более того, эти изменения (Kр, τ1, τ2, …) делаются автоматически с помощью блока Signal Constraint, который в результате целенаправленного поиска определяет оптимальные параметры настраиваемых блоков. Блок Signal Constraint подключается обычно к выходу S -модели, то есть контролируемым сигналом, как правило, является переходная характеристика системы. !! Подключите блок Signal Constraint к выходу S-модели следящей системы. При правильном выполнении всех предыдущих заданий получится модель, приведенная на рис. 4.2.
Рис. 4.2. S-модель следящей системы
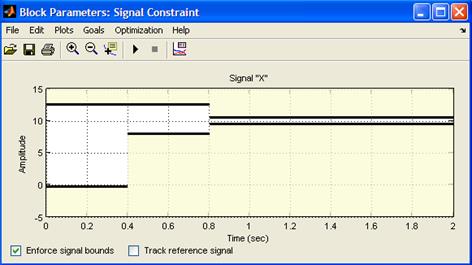
Очередной этап связан с настройкой параметров блока Signal Constraint. Эту процедуру рекомендуется выполнять в следующем порядке. Двойным щелчком мыши на пиктограмме Signal Constraint открыть основное окно Signal Constraint – Block Parameters: Signal Constraint (рис. 4.3).
Рис. 4.3. Основное окно Signal Constraint
В графической части этого окна по умолчанию предлагаются границы области, в которую должна вписываться переходная характеристика системы, получаемая в результате параметрической оптимизации. Для изменения границ этой области выбирается опция Goals/Desired Response…. Это приводит к появлению диалогового окна Desired Response (рис.4.4).
Рис. 4.4. Диалоговое окно Desired Response
Ввиду того, что оптимизация системы осуществляется по параметрам переходной характеристики, следует установить в этом окне переключатель в положение Specify step response characteristics и ввести в предлагаемые поля требуемые значения характеристик переходного процесса:
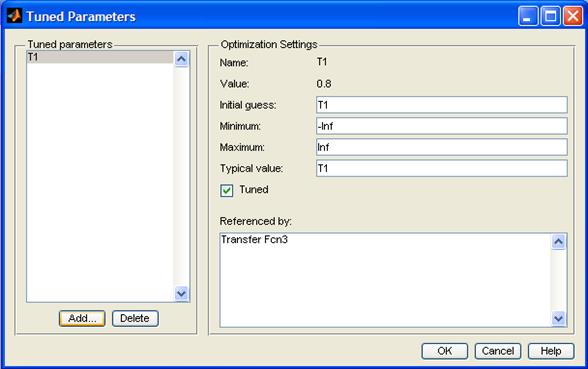
· в поле Initial value – исходное (начальное) значение переходной характеристики; · в поле Final value – установившееся (конечное) значение переходной характеристики; · в поле Step time – время начала наблюдения за переходным процессом; · в поле Rise time – время нарастания сигнала; · в поле %Rise – уровень для определения времени нарастания сигнала; · в поле Setting time – время переходного процесса; · в поле % Setting – зона установившегося значения в %; · в поле % Overshoot – перерегулирование в %; · в поле % Undershoot – недорегулирование (обычно 1%). Для подтверждения ввода установленных параметров необходимо нажать последовательно кнопки Apply и OK. !! Установите в первом приближении желаемые ограничения на зону переходной характеристики, исходя из результатов наблюдения по Scope. Следующий шаг связан с заданием настраиваемых параметров. Для этого подается команда Optimization/Tuned Parameters…, которая приводит к появлению диалогового окна Tuned Parameters (рис. 4.5).
Рис. 4.5. Диалоговое окно Tuned Parameters
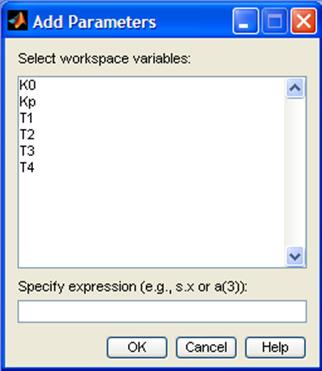
В его одноименное поле Tuned parameters формируется список настраиваемых параметров. Для этого нажимается кнопка Add…,в открывшемся окне Add Parameters (рис. 4.6) выделяются необходимые параметры и нажимается кнопка OK.
Рис. 4.6. Окно выбора настраиваемых параметров Add Parameters
Исключение какого-либо параметра из списка осуществляется аналогично – коэффициент выделяется и нажимается кнопка Delete. В правом поле окна Tuned Parameters автоматически выводятся диапазон изменения и исходное значение выбранного параметра. При необходимости границы диапазона (Minimum и Maximum) можно откорректировать. !! Установите в качестве настраиваемого параметра коэффициент передачи корректирующего устройства Kр.
|
||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 1324; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.226.96.124 (0.009 с.) |

 , при t > 0,
, при t > 0, , при n > 0.
, при n > 0.
 . Остальные параметры задайте в символьной форме, желательно в виде одноименных идентификаторов.
. Остальные параметры задайте в символьной форме, желательно в виде одноименных идентификаторов.