
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Физическая величина и её измерениеСодержание книги
Поиск на нашем сайте
Введение Современное состояние и перспективы развития техники измерений физических величин Современная информационно-измерительная техника располагает средствами измерения около двухсот различных физических величин – электрических, магнитных, тепловых, акустических, механических и т.д. Подавляющее большинство этих величин в процессе измерения преобразуется в величины электрические как наиболее удобные для передачи, усиления, математической обработки и точного измерения. Поэтому в современной измерительной технике находят широкое применение преобразователи разного рода физических величин в электрические величины[2]. Термин «измерительный преобразователь» употребляется в настоящее время достаточно широко и в разных смыслах. В данном методическом пособии под измерительным преобразователем понимается элементарный измерительный преобразователь, выполненный на основе определенного физического принципа: емкостный, магнитоупругий, пьезоэлектрический преобразователь и т. д.[1]. Для обозначения совокупности измерительных преобразователей, объединенных в один конструктивный узел, выносимый на объект измерения, сохранен укоренившийся в практике термин «датчик». Научно-технический прогресс во всех отраслях науки и техники тесно связан с ростом требований к объему и качеству измерительной информации. Информация, генерируемая в процессе измерений, теперь уже является не только источником получения новых знаний или средством проверки научных гипотез, но используется непосредственно для управления технологическими процессами. Поэтому от качества измерительной информации в конечном итоге зависит качество продукции, эффективность ее производства и использования[3].
Истинное и действительное значение физической величины При любом измерении неизбежны обусловленные разнообразными причинами отклонения результатов измерения от истинного значения измеряемой величины. Истинные значения физических величин – это значения, идеальным образом отражающие свойства данного объекта. Они не зависят от применяемых средств измерений и являются объективной характеристикой объекта. Результаты измерения представляют собой приближённые оценки значений величин, найденные путём измерения. Они зависят не только от величин, но и от метода измерения, от средств измерения, от свойств органов чувств оператора.[1]
Таким образом, действительное значение измеряемой величины – значение, полученное в результате измерения и настолько приближающееся к истинному значению, что для данной цели может быть использовано вместо него.
Средства измерений физических величин Упругие элементы измерительных преобразователей Резистивные преобразователи Принцип действия, общие свойства, область применения. Делители тока и напряжения. Контактные преобразователи И преобразователи контактного сопротивления. Реостатные преобразователи Реостатным преобразователем называют реостат, движок которого перемещается под действием измеряемой неэлектрической величины. Естественной входной величиной реостатных преобразователей является перемещение движка, а выходной величиной – сопротивление. На рис.2-9, а показано устройство реостатного преобразователя. На каркас 1 из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса зачищается, и по металлу проволоки скользит щетка 3. Добавочная щетка 5 скользит по токосъемному кольцу 4. Обе щетки изолированы от приводного валика 6.
Реостатные преобразователи выполня-ются как с проводом, намотанным на каркас, так и реохордного типа. Чаще всего используется провод из различных сплавов платины, обладающих повышенной коррози-онной стойкостью и износостойкостью; применяется также манганин, константан, фехраль. Микропровод позволяет выполнять миниатюрные преобразователи, имеющие габариты до 5 х 5 мм.
где r – сопротивление 1 м провода; w 0– число витков на единицу длины преобразователя.
Из заданной зависимости R =j (х) можно определить зависимость р =f (х). Реостатные преобразователи аналогично контактным являются ступенчатыми (дискретными) преобразователями (за исключением преобразователей реохордного типа), поскольку непрерывному изменению входной величины соответствует ступенчатое изменение сопротивления. При перемещении движка преобразователя на расстояние l, соответствующее w виткам, будут иметь место 2 w ступенек, однако эти ступеньки неодинаковы по длине преобразователя. Рассмотрим в качестве примера выходную характеристику преобразователя, включенного в режиме делителя напряжения, как показано на рис. 2-9, в. В положении 1 движок, имеющий ширину 2d, где d – диаметр витка, замыкает накоротко витки а и b, и выходное напряжение:
где w 0 — полное число витков и п – число витков до витка а. При смещении движка на расстояние d /2, т.е. в положение 2, движок замыкает накоротко три витка а, b и с, и выходное напряжение Дополнительное расширение полосы неопределенности происходит за счет шума, «генерируемого» движком при его движении (вариации контактного сопротивления, временное разъединение движка и контактной дорожки, ЭДС трения и т.д.). Поэтому в целом погрешность нуля реостатных преобразователей оценивается значением ± (2/ w ¸ 1/ w). Измерительные цепи, в которые включаются реостатные преобразователи, питаются преимущественно постоянным напряжением, но могут питаться и переменным напряжением. Напряжение питания преобразователя определяется его допустимой мощностью (для самых малогабаритных преобразователей допустимая мощность составляет не менее 0,1 Вт) и сопротивлением. Напряжение питания, как правило, стабилизируется. Наиболее распространенным является включение преобразователя в виде управляемого делителя напряжения или включение преобразователя в измерительный мост. Номинальное изменение сопротивления реостатного преобразователя достигает 90%, поэтому необходимо учитывать нелинейность, вносимую измерительной схемой, и, исходя из допустимой погрешности линейности, выбирать сопротивление измерительного прибора.
Тензорезисторы Физические основы тензорезистивного эффекта. В основе работы тензорезисторов лежит явление тензоэффекта, заключающееся в изменении сопротивления проводников и полупроводников при их механической деформации. Относительное изменение сопротивления R =r l/S при деформации резистора определяется формулой: e R = D R/R =Dr/r + D l/l + D S/S. Учитывая, что в твердом теле в зоне упругих деформаций величины поперечных и продольной деформаций связаны через коэффициент Пуассона Для жидких и текучих материалов (ртуть, электролиты в эластичной изоляционной оболочке, пластически деформируемые металлы), в которых напряжения отсутствуют, Dr/r=0, m=0,5, так как объем материала при деформации сохраняется постоянным, и e R =2e l. В металлах удельное сопротивление зависит только от напряжения растяжения или сжатия (рис. 2-10, а), не зависит от сдвиговых напряжений и определяется формулой:
где s1, s2 и s3 – механические напряжения в трех взаимно перпендикулярных направлениях; p11 и p12=p13 – тензорезистивные коэффициенты, называемые продольным и поперечным; E 1 и J 1 – напряженность поля и плотность тока в направлении 1, совпадающем с направлением действия напряжения s1 (рис. 2-10, б).
Рис. 2-10
Для металлического тензоэлемента Для константана, из которого чаще всего делаются тензорезисторы, p11= 1,5×10-12 Па-1; p12=2,25×10-12 Па-1. При линейно напряженном состоянии s1=s; s2=s3=0; Dr/r=p11s; e R =p11s+(1+2m)e l. Учитывая, что в зоне упругих деформаций s= Е e l, где Е – модуль упругости, получим e R =[p11 Е +(1+2m)]e l. Величина К Т=e R /e l – коэффициент тензочувствительности. При гидростатическом сжатии изменения сопротивления и давления связаны формулой e R = –[p11+2p12–(1–2m)/ Е ] Р. Коэффициент KР =e R / Р – барический коэффициент резисторов. Барический коэффициент константана КР = 4,5·10-12 Па-1, манганина КР =27·10-12 Па-1. На рис. 2-11 в качестве примера приведены зависимости относительного изменения сопротивления от деформации для элементов из р и n -кремния, из которых видно, что рабочий диапазон деформации должен быть ограничен значениями ±0,1%. Температурные погрешности тензорезисторов. При изменении температуры изменяется начальное сопротивление тензорезистора и коэффициент тензочувствительности. Таким образом, для тензорезисторов характерна температурная погрешность нуля и температурная погрешность чувствительности. Изменение начального сопротивления наклеенного тензорезистора определяется двумя факторами: изменением удельного сопротивления материала r непосредственно под действием температуры и изменением r под действием дополнительного механического напряжения, появляющегося в тензорезисторе, если коэффициенты линейного расширения детали и тензорезистора не равны. Величина «кажущейся» деформации при воздействии температуры определяется формулой: DeΘ=[aΘ/ К Т+(bД –bТ)]Θ,
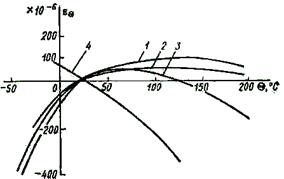
где aΘ – температурный коэффициент сопротивления (ТКС);bД и bТ – коэффициенты линейного расширения (КЛР) материалов детали и тензорезистора. ТКС константана в зависимости от примесей в сплаве может иметь любое значение в пределах ±30·10-6 К-1, причем в относительно небольшом интервале температур заданное значение ТКС обеспечивается с погрешностью ±(0,5–1)·10-6 К-1. Это позволяет для многих материалов объектов измерения (сталь, нержавеющая сталь, сплавы алюминия) изготовлять термокомпенсированные тензорезисторы. Кажущаяся деформация изменяется с температурой примерно так, как показано на рис. 2-12 для термокомпенсированных тензорезисторов, наклеенных на сталь (кривая 1), алюминий (кривая 2) и нержавеющую сталь (кривая 3); здесь же для сравнения приведена кривая 4 температурной погрешности тензорезистора, предназначенного для наклейки на нержавеющую сталь, а наклеенного на сталь. Для термокомпенсированных тензорезисторов величина кажущейся деформации в диапазоне температур 20–100°С не превышает DeΘ=1,5·10-6 К-1, что при измеряемой деформации el=10-2 приводит к температурной погрешности нуля 0,00015 К-1.
Подобная самокомпенсация кажущейся деформации невозможна для дискретных полупроводниковых тензорезисторов. Действительно, КЛР кремния очень мал (около 2,5·10-6 К-1) по сравнению с КЛР металлов (сталь – 11·10-6 К-1, алюминий – 22,5·10-6 К-1), ТКС тензорезистора из кремния p -типа положителен (aΘ= 0,7·10-3 К-1). Таким образом, кажущаяся деформация тензорезистора, наклеенного на сталь, составляет примерно DeΘ= (7,4 + 8,5)·10-6» 16·10-6 К-1, что приводит при максимальной измеряемой деформации el=10-3 к температурной погрешности нуля gΘ= 0,016 К-1 [1]. Температурный коэффициент чувствительности (ТКЧ) определяется изменением коэффициентов тензочувствительности под действием температуры. Конструкции и технические характеристики дискретных металлических и полупроводниковых тензорезисторов. Устройство наиболее распространенного типа наклеиваемого проволочного тензорезистора изображено на рис. 2-13, а. На полоску тонкой бумаги или лаковую пленку 2 наклеивается так называемая решетка из зигзагообразно уложенной тонкой проволоки 3 диаметром 0,02–0,05 мм. К концам проволоки присоединяются (пайкой или сваркой) выводные медные проводники 4. Сверху преобразователь покрывается слоем лака 1. Такой преобразователь, будучи приклеенным к испытуемой детали, воспринимает деформации ее поверхностного слоя. Измерительной базой преобразователя является длина детали, занимаемая проволокой. Наиболее часто используются преобразователи с базами 5–20 мм, обладающие сопротивлением 30–500 Ом.
Рис. 2-12
Фольговые преобразователи представляют собой ленту из фольги толщиной 4–12 мкм, на которой часть металла выбрана травлением таким образом, что оставшаяся его часть образует решетку с выводами. Габариты фольговых преобразователей меньше, чем у проволочных; известны тензорезисторы с базой до 0,8 мм. Металлические пленочные тензорезисторы изготовляются путем вакуумной возгонки тензочувствительного материала с его последующим осаждением на основу (подложку). Форма тензорезистора задается маской, через которую производится напыление. Пленочные тензорезисторы имеют толщину меньше 1 мкм. Весьма важным параметром тензочувствительной решетки является расстояние между витками. Это расстояние определяет при заданных габаритах резистора число витков и, следовательно, сопротивление, а также допустимый ток, который ограничивается самонагревом и будет тем меньше, чем меньше расстояние между витками. Кроме того, наличие поперечных участков длиной b (рис. 2-13, a)вызывает изменение сопротивления тензорезистора за счет деформации этих участков при действии на деталь напряжения, перпендикулярного оси чувствительности тензорезистора. Для проволочных тензорезисторов отношение поперечной и продольной чувствительностей определяется отношением b/l. У фольговых тензорезисторов поперечная чувствительность значительно меньше за счет расширения поперечных участков (рис. 2-13, б).
Характерные типы фольговых преобразователей показаны на рис. 2-13, в, г, д. На рис. 2-13, в изображен элемент, состоящий из четырех тензорезисторов, образующих четыре плеча моста. Этот элемент наклеивается на мембрану. Тензорезисторы, расположенные в центре, испытывают растяжение, на периферии – сжатие. К выводам 1 и 3 подводится питание, выводы 2, 4' и 4" образуют измерительную диагональ. Выводы 4' и 4" разомкнуты для того, чтобы можно было включить добавочный резистор R в нужное плечо и добиться подбором R равновесия моста.
Рис. 2-13
Розетка из трех тензорезисторов, показанная на рис. 2-13, г, применяется при измерении напряжений детали, находящейся в плосконапряженном состоянии, в том случае, когда направления действия напряжений неизвестны. По изменениям сопротивлений трех тензорезисторов определяются направления главных напряжений и их значения. Элемент, показанный на рис. 2-13, д, состоит из двух тензорезисторов и используется при измерении деформации валов при их скручивании. Для тензорезисторов, работающих в диапазоне температур до 180 °С, в качестве тензочувствительного материала используется константан. Для более высоких температур (200–1000 °С) применяются специальные сплавы. Основа тензорезистора (рис. 2-13, а) представляет собой тонкую полоску пропитанной клеем бумаги или лаковую пленку, из этого же материала выполняется обычно и покрышка. При высокой температуре (до 400 °С) может быть применена стеклоткань, пропитанная высокотемпературным цементом. Для крепления тензорезистора к детали чаще всего используется клей. Креплению должно уделяться очень большое внимание, так как именно через пленку клея происходит передача деформации с детали на тензорезистор и теплоотдача в деталь. Нарушение технологии может привести к весьма существенным погрешностям, вызываемым ползучестью клея. В результате ползучести измеряемая деформация уменьшается по абсолютной величине. Значение погрешности зависит от технологии приклейки, температуры, величины деформации и в лучшем случае составляет 0,05–0,2%. Из сравнения температурных возможностей тензочувствительного материала и клея видно, что ограничение температурного диапазона обусловливается прежде всего клеями. Поэтому для крепления высокотемпературных тензорезисторов применяют неорганические фосфатные цементы и жаростойкие окислы алюминия, наносимые на деталь методом газопламенного напыления. При таком креплении температурный диапазон ограничивается не ползучестью крепления с повышением температуры, а ухудшением изоляционных свойств цемента или окиси алюминия. Рабочий диапазон тензорезисторов ограничен температурой 350–600°С при статических деформациях и 600–800°С при динамических деформациях. В случае измерения динамических деформаций в диапазоне температур до 1000°С применяется крепление с помощью контактной сварки. Полупроводниковые тензорезисторы дискретного типа представляют собой тонкие полоски из кремния p -типа, вырезанные в направлении оси [111], или из кремния n -типа, вырезанные в направлении оси [100]; применяется также германий р и n- типов. На концах полоски расположены контактные площадки, к которым припаиваются выводы; длина контактной площадки 0,25–0,6 мм. Полупроводниковые тензорезисторы имеют длину 2–12 мм, ширину 0,15–0,5 мм. Начальные сопротивления тензорезисторов лежат в диапазоне 50–10000 Ом, коэффициент тензочувствительности К Т= 50¸200. Вследствие очень больших температурных погрешностей дискретные полупроводниковые тензорезисторы находят применение только для измерения очень малых динамических деформаций, где решающим фактором является коэффициент тензочувствительности. Конструкции интегральных полупроводниковых тензорезисторов. В последние годы благодаря широкому развитию планарной технологии появилась возможность изготовлять датчики с полупроводниковыми тензорезисторами, выращивая последние непосредственно на упругом элементе, выполненном из кремния или сапфира. Упругие элементы из кристаллических материалов обладают упругими свойствами, близкими к идеальным, и погрешностями гистерезиса и линейности у них существенно меньше по сравнению с металлическими. Тензорезистор «сцепляется» с материалом упругого элемента за счет внутримолекулярных сил, что исключает все погрешности, связанные с передачей деформации от упругого элемента к тензорезистору. На одном упругом элементе выращивается обычно не один тензорезистор, а структура в виде полумоста или даже целый мост и, кроме того, термокомпенсирующие элементы. Из-за применяемой технологии у двух тензорезисторов, входящих в полумост, идентичность значительно больше, чем у дискретных резисторов. Кроме того, благодаря малым габаритам тензорезисторов обеспечивается большая идентичность внешних условий и, таким образом, существенно снижаются погрешности нуля. Все это ведет к широкому развитию в последние годы датчиков с так называемыми интегральными тензорезисторами, выполняемых в виде КНК-структур (кремний на кремнии) и КНС-структур (кремний на сапфире). В КНК-структурах электрическая изоляция осуществляется р-п- переходом, несовершенство изоляционных свойств которого ограничивает надежность датчиков; у датчиков с КНС – структурами стабильность характеристик больше. КНС-структура положена, например, в основу датчиков давления, входящих в приборный комплекс «Сапфир-22», разработанный НИИ «Теплоприбор». Область применения тензорезисторов. При всем многообразии задач, решаемых с помощью тензорезисторов, можно выделить две основные области их использования. К первой области относятся исследования физических свойств материалов, деформаций и напряжений в деталях и конструкциях. Для этих задач характерны значительное число точек тензометрирования, широкие диапазоны изменения параметров окружающей среды, а также невозможность градуировки измерительных каналов. Основной причиной погрешности в этих случаях является разброс параметров тензорезисторов R и К Т вокруг средних для данной партии значений, погрешность измерения составляет 2–10%. Вторая область – применение тензорезисторов для измерения механических величин, преобразуемых в деформацию упругого элемента. В этом случае датчики градуируются по измеряемой величине и погрешности измерений лежат в диапазоне 0,5—0,05%. Тензорезисторы используются для измерения статических и динамических деформаций, верхняя граница частотного диапазона определяется соотношением между длиной волны l и базой l тензорезистора. Для того чтобы не было искажения результата измерения из-за усреднения деформации, принимается отношение 1/l £ 0,1. В частности, для измерения в стальных деталях динамических деформаций с частотой до 50 кГц должны применяться тензорезисторы с базой, не больше 10 мм, так как скорость распространения ультразвука в стали v = 5000 м/с и длина волны l = v/f = 100 мм. При измерении динамических деформаций величина максимальной деформации для проволочных тензорезисторов не должна превышать el£0,1%, для полупроводниковых – el£0,02%, так как при больших деформациях резко понижается надежность тензорезисторов. Для повышения точности и чувствительности тензорезисторов, а также измерительных цепей к ним устанавливают предельные возможности тензорезисторов, определяемых термодинамическими флюктуациями. Тензорезистор является параметрическим преобразователем с внутренним сопротивлением R и может быть представлен в виде эквивалентного генератора с мощностью короткого замыкания Р К.З= Р Тe R 2 =Р Т (К Тel)2, где Р Т – мощность, потребляемая тензорезистором. Средняя мощность термодинамического шума равна Р Ш=4 kТ D f, где k =1,38·10-23 Дж/К – постоянная Больцмана; T – абсолютная температура; D f – полоса частот. Отсюда средняя квадратичная погрешность находится в виде d= Принцип действия и область применения электростатических преобразователей. Использование в вольтметрах и датчиках уравновешивания. Емкостные преобразователи. Измерительные цепи емкостных преобразователей Простейший электростатический (ЭС) преобразователь содержит два электрода площадью S, параллельно расположенных на расстоянии d в среде с диэлектрической проницаемостью e. С электрической стороны преобразователь характеризуется напряжением U между пластинами, зарядом q = CU, где С – ёмкость, равная при плоскопараллельном расположении пластин С = e S /d (без учета краевого эффекта), током i = dq/dt, энергией электрического поля WЭ = qU/ 2= CU2/ 2. Если одна из пластин (или диэлектрик между ними) имеет возможность перемещаться, то с механической стороны преобразователь характеризуется жесткостью подвеса подвижной пластины w, перемещением ее х, скоростью перемещения u=dx/dt и электростатической силой притяжения f эс= dWэ/dx [1]. Взаимосвязь механической и электрической сторон преобразователя отражается уравнениями: dF=wx+E 0 C 0 u; dq=E 0 C 0 x+C 0 u. Эквивалентная схема ЭС преобразователя, схематическая конструкция которого показана на рис. 2-24, а, приведена на рис. 2-24, б. В эквивалентной схеме учитываются емкость С 0 между электродами 1 и 2, сопротивление R ут изоляции между электродами, сопротивление r и индуктивность L кабеля К и его заземленным экраном Э. Влияние отдельных элементов схемы учитывается в зависимости от конкретных обстоятельств. Так, при работе на низкой частоте сопротивление конденсатора велико и влияние индуктивности и сопротивления ввода не сказывается. При работе на высоких частотах сопротивление конденсатора падает и большую роль начинают играть индуктивность и сопротивление ввода, в то время как шунтирующее действие сопротивления утечки перестает сказываться. В этом случае удобнее последовательная эквивалентная схема преобразователя (рис. 2-24, в), где r экв= r и С экв= С 0+ С п. Влияние сопротивления утечки может быть учтено соответствующей добавкой в сопротивлении r экв= r +1/(w2 C 2экв R ут). Действие индуктивности токоподводов начинает сказываться обычно на частотах свыше 10 МГц. В эквивалентной схеме ЭС преобразователя с диэлектриком должны быть учтены потери в последнем. Из-за потерь в ЭС преобразователе сдвиг фаз между напряжением и током оказывается меньше p/2 на угол потерь d. Последовательная и параллельная схемы, учитывающие потери в диэлектрике, представлены на рис. 2-27, г. Эквивалентные сопротивления для этих схем выражают часто через приводимый в справочных данных тангенс угла потерь d как r 1экв=tgd/(w C 1экв) или R 2экв=1/(w2эквtgd). Емкости С 1экв и С 2экв связаны между собой зависимостью С 2экв= С 1экв/(1+tgd), и, так как обычно tgd<<1, их можно считать приблизительно равными: С 1экв» С 2экв» С экв. В образцовых воздушных конденсаторах tgd не превышает 5·10-5, так как определяется только потерями в изоляции между электродами и в материале электродов. В конденсаторах с диэлектриком угол потерь значительно больше и, кроме того, может зависеть от напряжения на конденсаторе, частоты, температуры и влажности. В частности, зависимость от влажности настолько существенна, что на этом принципе строятся измерители влажности зерна и некоторых других сыпучих материалов. В некоторых случаях при наличии диэлектрика между электродами преобразователя приходится считаться с тем, что после поляризации диэлектрики еще в течение какого-то времени (0,1 – 2 с) сохраняют заряд (абсорбция), что приводит к остаточным напряжениям, достигающим нескольких процентов от значения приложенного напряжения. Влияние абсорбции в эквивалентной схеме конденсатора в первом приближении можно учесть включением параллельно емкости С 0 цепочки, состоящей из емкости С а, и сопротивления R а. Поэтому полная эквивалентная схема ЭС преобразователя может быть представлена в виде рис. 2-24, д.
Рис. 2-24
При работе ЭС преобразователей на постоянном токе нужно учитывать существующую между электродами контактную разность потенциалов (КРП), включаемую в эквивалентной схеме последовательно с емкостью. КРП зависит от природы материалов, свойств и чистоты поверхности и существует даже между электродами, выполненными из одного и того же материала. Так, между электродами, выполненными из алюминия высокой чистоты, КРП может достигать 1 В. Лишь применение специальных мер позволяет снизить КРП до значения 10— 20 мВ. Допустимое напряжение на конденсаторе определяется значением напряженности, при которой наступает пробой воздушного промежутка. Для воздуха при нормальном давлении и зазорах между пластинами 0,1 – 10 мм эта напряженность составляет 2 – 3 кВ/мм. При зазорах, меньше 0,1 мм можно не снижать напряжения, так как при напряжениях, меньше 350 В воздушный промежуток вообще не пробивается независимоот длины зазора. В ряде случаев напряжение питания ограничивается допустимыми силами электростатического притяжения между пластинами. В одинарном преобразователе при диаметре пластины d = 25 мм, зазоре d = 0,1 мм и напряжении U = 50 В значение электростатической силы достигает f эс =U2 e S/ (2d)2 = 6·10-4 Н. В дифференциальном преобразователе с переменным зазором (см. рис. 2-24, д), силы, действующие между парами пластин, направлены встречно и компенсируют друг друга. Однако полная компенсация возможна только, если входное сопротивление цепи, включенной в диагональ моста, бесконечно велико и рабочие емкости ничем не шунтируются. В этом случае уменьшение или увеличение зазора вызывает пропорциональное уменьшение или увеличение напряжения между соответствующими пластинами; сила, действующая между ними, остается неизменной, т.е. разность сил равна нулю независимо от перемещения средней пластины. Зависимость емкости от внешних условий. Относительное изменение емкости С= e S /d определяется как gC=ge+g S –gd. Площадь S, как правило, определяется линейными размерами, составляющими 10 – 100 мм, и изменение этих размеров на 0,1 – 1 мкм вызывает пренебрежимо малое изменение площади S и емкости С. Зазор d в ЭС преобразователях составляет 10 мкм – 1 мм, и его изменения даже на 0,1 мкм могут вызвать существенную погрешность. Поэтому при конструировании ЭС преобразователей должны быть тщательно продуманы вопросы крепления электродов и защиты от выпадения на рабочих плоскостях электродов каких-либо осадков (герметизация, вакуумирование и т.д.). Одной из основных причин изменения зазора является изменение геометрических размеров, вызываемых линейным расширением материалов под действием температуры. Диэлектрическая проницаемость воздуха весьма стабильна и мало меняется под действием внешних условий: при изменении температуры на 10 °С ge = 0,002%, при изменении влажности от 30 до 40% ge=0,01%, при изменении давления на 105 Н/м2 ge = 0,06%. Стабильными диэлектриками являютсятакже плавленый кварц (ge= 5·10-6 K-1) и стекло. Диэлектрическая проницаемость ряда керамик, в особенности сегнетокерамик, наоборот, сильно зависит от напряженности приложенного электрического поля, температуры и гидростатического давления. На основе сегнетокерамических материалов выпускаются различные типы варикондов — переменных конденсаторов с нелинейной зависимостью емкости от приложенного напряжения, используемых в схемах допускового контроля напряжения, а также сегнетокерамические преобразователи реле контроля температуры. Достоинства сегнетокерамических преобразователей – малое потребление мощности (сопротивление между электродами на постоянном токе 108 – 109 Ом) и, следовательно, малый самонагрев. Недостатками, мешающими их широкому использованию в измерительных цепях, являются плохая воспроизводимость характеристик у различных образцов и критичность к влиянию внешних факторов. Например, характеристики варикондов зависят от температуры, а температурные характеристики реле контроля температуры зависят от напряженности поля.
И датчиках уравновешивания Силы, создаваемые ЭС преобразователями, чрезвычайно малы и на несколько порядков меньше сил, которые можно получить в электромагнитных преобразователях. Однако ЭС преобразователи обладают рядом ценных качеств, которые обусловливают их применение в вольтметрах. Во-первых, как видно из формулы вращающего момента ЭС преобразователя М вр=½ U 2¶ C /¶a, вращающий момент пропорционален квадрату напряжения как постоянного, так и переменного тока. Уменьшение напряжения на пластинах преобразователя (см. рис. 2-24, а) и, следовательно, частотная погрешность начнут проявляться только на частотах, при которых заметно падает напряжение на сопротивлении ввода z = Сопротивление r незначительно, и им обычно можно пренебречь. Поэтому частотная погрешность может быть оценена формулой Обозначив Во-вторых, ЭС преобразователь, обладая высоким входным сопротивлением, потребляет исключительно малую мощность: на постоянном токе его входное сопротивление R вх = 109¸1011 Ом, на переменном токе Z вх»1/(j w C). Если учесть, что входная емкость преобразователя не превышает 10 – 100 пФ, его сопротивление даже при частоте f = 1 МГц составляет не менее 10 – 1 кОм. Наконец, в уравнение преобразования напряжения в силу или вращающий момент входят только стабильные величины – диэлектрическая проницаемость воздуха e0 и геометрические размеры, поэтому принципиально ЭС преобразователь обладает очень высокой точностью. Эти ценные качества обусловили, несмотря на малость создаваемых вращающих моментов, широкое применение электростатических вольтметров с пределами измерения 10 В – 100 кВ. Схематическая конструкция механизма электростатического вольтметра С95 приведена на рис. 2-25. На стойке 2 укреплен на изоляционной колонке 11 неподвижный электрод 10, представляющий собой камеру из двух параллельных пластин. Между этими пластинами находится подвижный электрод 9. Подвижный электрод монтируется на оси 7, на этой же оси прикреплено зеркало 8. Подвижная часть крепится на двух растяжках 1. Растяжки крепятся к амортизационным пружинам со втулками 5. На стойке укреплен поводок корректора 4, ограничитель смещения подвижной части 6 и магнит успокоителя 3.
Рис. 2-25
Вращающий момент M вр= Противодействующий момент Мпр = W a, где W – удельный противодей-ствующий момент растяжек. Таким образом, угол поворота подвижной части <
|
||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-22; просмотров: 320; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.50.1 (0.011 с.) |


 Формы каркасов очень разнообразны: они могут быть в виде пластины, цилиндра, кольца и т.д. Выбирая форму каркаса, можно получить определенную функциональную зависимость между перемещением и выходным сопротивлением, как показано примера на рис. 2-9, б. Выходное сопротивление реостатного преобразователя, периметр каркаса р и входное перемещение х связаны между собой зависимостью:
Формы каркасов очень разнообразны: они могут быть в виде пластины, цилиндра, кольца и т.д. Выбирая форму каркаса, можно получить определенную функциональную зависимость между перемещением и выходным сопротивлением, как показано примера на рис. 2-9, б. Выходное сопротивление реостатного преобразователя, периметр каркаса р и входное перемещение х связаны между собой зависимостью: ,
, ,
, ; при смещении движка еще на d/ 2выходное напряжение
; при смещении движка еще на d/ 2выходное напряжение  . Размер ступенек напряжения при перемещении движка на расстояние d /2 будет зависеть от n: первая ступенька с увеличением п увеличивается, а вторая – уменьшается, сумма остается постоянной:
. Размер ступенек напряжения при перемещении движка на расстояние d /2 будет зависеть от n: первая ступенька с увеличением п увеличивается, а вторая – уменьшается, сумма остается постоянной:  . Выходное напряжение преобразователя показано на рис. 2-9, в.
. Выходное напряжение преобразователя показано на рис. 2-9, в. , как
, как  , где b – поперечный размер проводника, выражение для e R можно представить в виде
, где b – поперечный размер проводника, выражение для e R можно представить в виде  .
. ,
,
 и
и  .
.

 .
.
 .
. .
. , выражение для погрешности приведем к виду
, выражение для погрешности приведем к виду  . Частота f 0 лежит обычно в пределах 30 – 100 МГц. Соответственно при g f= 1% верхняя граница частотного диапазона ЭС преобразователей составляет 3 – 10 МГц, и эти преобразователи используются в вольтметрах с широким частотным диапазоном.
. Частота f 0 лежит обычно в пределах 30 – 100 МГц. Соответственно при g f= 1% верхняя граница частотного диапазона ЭС преобразователей составляет 3 – 10 МГц, и эти преобразователи используются в вольтметрах с широким частотным диапазоном.
 .
.


