
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Функциональная схема объекта управленияСодержание книги
Поиск на нашем сайте БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Факультет информационных технологий и робототехники
Кафедра "Электропривод и автоматизация промышленных установок и технологических комплексов"
КУРСОВАЯ РАБОТА
по дисциплине "Теория автоматического управления" Тема: "Расчет следящей системы автоматического регултрования"
Исполнитель: ___________________ Д.В. Позняк (подпись, дата)
студент 3 курса 107619 группы
Руководитель: ___________________ П.П. Примшиц (подпись, дата)
Минск 2010 ВВЕДЕНИЕ Целью настоящей курсовой работы является разработка следящей системы с ЭП постоянного тока. Синтез САУ является одним из основных этапов проектирования электропривода. Целью синтеза является определение структурной схемы системы управления (вида дифференциального уравнения и передаточной функции) и ее параметров (коэффициенты дифференциального уравнения), а также выработка такого конструктивного решения, при котором обеспечивается требуемое качество, а сама система состоит из наиболее простых устройств управления. В процессе синтеза физические элементы системы представляются в виде динамических звеньев, которые описываются математически. На основании математической модели объекта управления подбираются регуляторы и рассчитываются необходимые параметры САУ. Затем строятся динамические характеристики САУ и разрабатывается ее принципиальная схема. САУ электроприводами нашли широкое применение в промышленности благодаря их быстродействию и высокой точности отработки заданных законов движения. Следящая система представляет собой замкнутую систему автоматического регулирования, предназначенную для воспроизведения выходной величины с определенной точностью, изменяющуюся по произвольному, заранее неизвестному закону. Следящие системы характеризуются тем, что задаваемый закон изменения выходной координаты является случайной функцией времени. Функциональная схема объекта управления
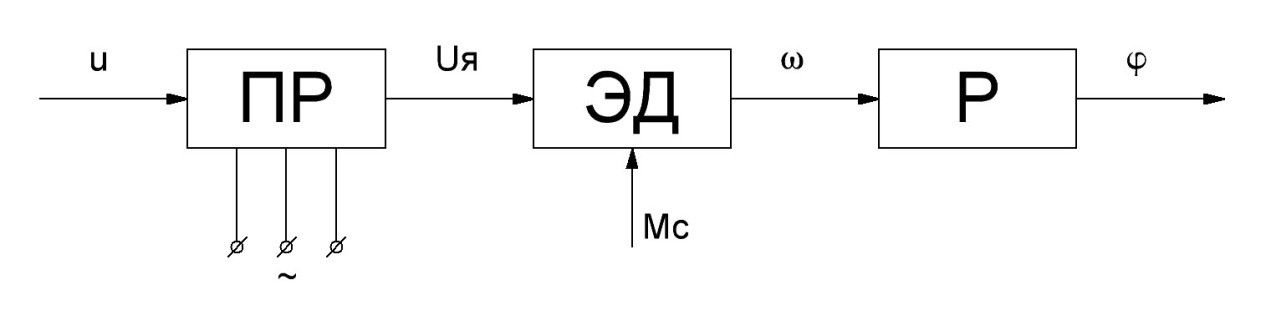
Объектом управления является управляемый преобразователь, состоящий из системы управления и вентильного выпрямителя, двигателя постоянного тока и редуктора.
Рис.1.1. Схема объекта управления где ПР – преобразователь; ЭД – двигатель постоянного тока; Р – редуктор; Мс – статический момент.
По справочнику для двигателя 2ПБ112МУХЛ4 определяем следующие параметры:
Синтез САУ методом последовательной Оптимизации контуров Сущность метода синтеза заключается в том, что в начале синтезируется контур тока, затем контура скорости и наконец контур положения. Причем эти контура синтезируются из условия максимального быстродействия, что позволяет более качественно отработать закон изменения задающего воздействия UЗ.
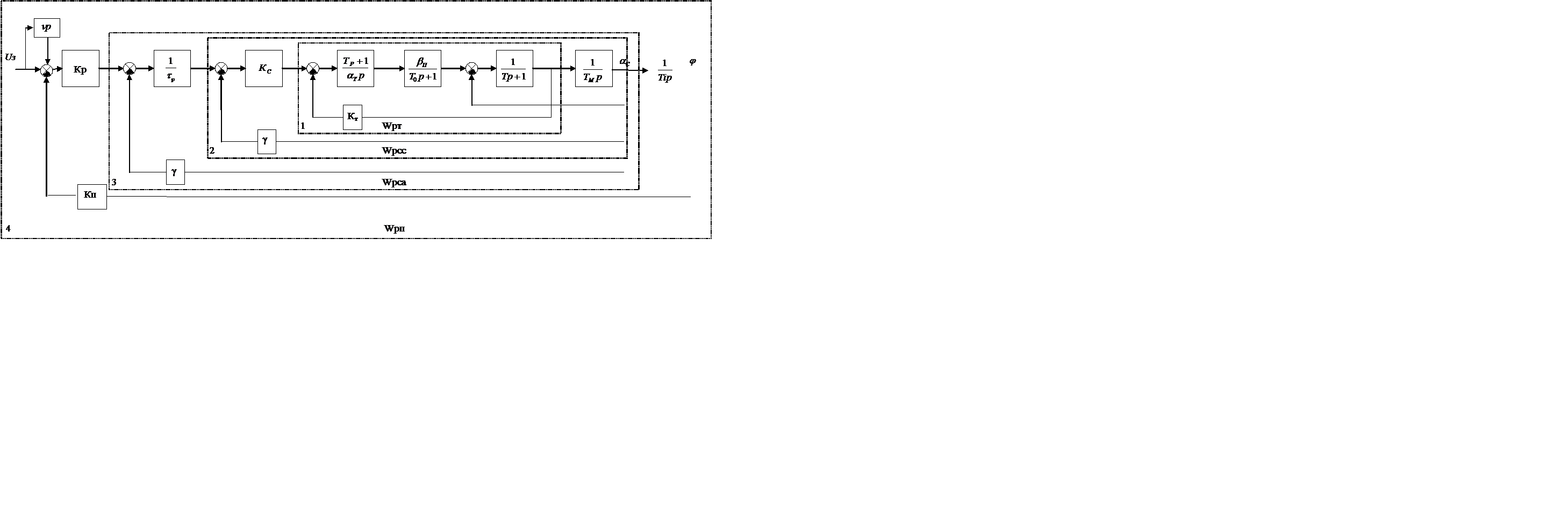
Рис.3.1. Структурная схема следящей САУ
· 1 - Астатический контур тока;
Wрт - передаточная функция регулирования тока; · 2 - статический контур скорости; Wрсс - передаточная функция статического регулирования скорости; · 3 - астатический контур скорости; Wрса - передаточная функция астатического регулирования скорости; · 4 – контур положения; Wрп - передаточная функция контура положения.
Расчет контура тока Коэффициент обратной связи по току По условиям коммутации
Регулятор тока пропорционально-интегральный, его постоянная времени принимается равной электромагнитной постоянной двигателя. Структурная схема контура тока представлена на рис. 3.2.
Рис.3.2. Структурная схема контура тока Из структурной схемы можно записать:
Примем корни характеристического уравнения соответствующие техническому оптимуму.
В этом случае справедливо:
Приравняв коэффициенты при одинаковых степенях получим:
Находим постоянную времени астатического звена контура тока:
С учетом проведенных преобразований передаточная функция астатического контура тока примет вид:
Расчет регулятора положения
Рис.3.5. Структурная схема контура положения
Из структурной схемы можно записать:
Передаточная функция регулятора положения:
При синтезе контура положения делаем допущение: пренебрегаем коэффициентом при старшей степени р.
Примем корни характеристического уравнения соответствующие техническому оптимуму.
В качестве датчика обратной связи по положению используется фотоимпульсный датчик. Одному обороту датчика соответствует 1000 импульсов. Один импульс - 20 мВ. Одному импульсу соответствует
Исходя из заданного значения добротности необходимо определить коэффициент n.
Для квазиустановившегося режима, когда скорость не изменяется (
При
Управляющего устройства Проектирование принципиальной схемы начнем с выбора элементов. Операционные усилители принимаем К140УД5А. Эти микросхемы имеют низкое энергопотребление, обладают достаточной чувствительностью и имеют двуполярное напряжение питания 12В. В качестве логических элементов 2И-НЕ примем микросхемы К555ЛА3, т.к. они менее требовательны к стабильности источника питания. В качестве реверсивных счетчиков возьмем микросхемы К555ИЕ7. В качестве цифро-аналогового преобразователя используем микросхему К572ПА2. Расчет пассивных элементов схемы начинаем с фотоимпульсного датчика (ФИД). Сигналы с ФИД поступают на элементы DD7.1 и DD7.2. Сигналы представляют импульсы скважностью 0,5 и сдвинутые на 900. На элементах DD6.3, DD6.4, DD7.1, DD7.2 и цепочках R46 C9 и R47 C10 собраны формирователи импульсов. Для работы счетчика достаточно импульса длительностью 1мс. Примем R46 = R47 = 1 кОм, тогда С9 = С10 = На элементах DD5.1-DD6.2 собрана схема определение направления вращения и инверторы. Схема синхронизации построена на элементах DD4.1-DD4.4. Она необходима для того, чтобы одновременно на входы сложения и вычитания реверсивного счетчика не поступали импульсы, т.к. при одновременной подаче импульсов происходит переполнение счетчика. С выхода схемы синхронизации импульсы поступают на реверсивный счетчик из элементов DD1-DD3, соединенных последовательно. Код от интерполятора поступает на преобразователи частота-напряжение ПЧН1, ПЧН2. На преобразователи ПЧН3, ПЧН4 поступают импульсы о блока определения направления вращения. С выходов счетчиков сигнал подается на ЦАП, где двоичный код преобразуется в напряжение. Применена типовая схема включения ЦАП: R1 = 20 кОм; R9 = 13 кОм; R10 = 10 кОм; R11 = 5,1 кОм. Кроме того, на ЦАП подается опорное напряжение 5В. На элементе DA3 реализовано звено
Принимаем R6=820 кОм. R12 = R13 = R14 = R8 = 43 Ом; R16 = Принимаем R16=68 кОм. Номиналы датчика тока:
R21 = 30 кОм; R22 = 15 кОм; R20 = 10 кОм. Элементы преобразователей частота-напряжение используются в соответствии с типовыми схемами. Все резисторы, за исключением R50, типа МЛТ-0,25; конденсаторы К10-73; диоды КД522.
Рис.8.1 Принципиальная схема управляющего устройства Заключение Оценим быстродействие системы, синтезированной методом последовательной оптимизации контуров и методом модального управления. Время регулирования контура положения:
Время регулирования системы синтезированной методом модального управления:
Качество отработки линейного закона перемещения выше в системе, синтезированной методом модального управления. Метод оптимизации контуров основан на ряде допущений, т.е. менее точен, чем метод модального управления. Однако, несмотря на это недостаток, серийные привода выпускаются по системе основанной на последовательной оптимизации контуров, т.к. они более удобны в наладке. Список используемой литературы 1. В.Л Анхимюк, О.Ф.Опейко “Проектирование систем автоматического управления электроприводами” – Минск, “Высшая школа”,1986 2. В.Л.Анхимюк, О.Ф.Опейко, Н.Н.Михеев “Теория автоматического управления” – Минск, 2000
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Факультет информационных технологий и робототехники
Кафедра "Электропривод и автоматизация промышленных установок и технологических комплексов"
КУРСОВАЯ РАБОТА
по дисциплине "Теория автоматического управления" Тема: "Расчет следящей системы автоматического регултрования"
Исполнитель: ___________________ Д.В. Позняк (подпись, дата)
студент 3 курса 107619 группы
Руководитель: ___________________ П.П. Примшиц (подпись, дата)
Минск 2010 ВВЕДЕНИЕ Целью настоящей курсовой работы является разработка следящей системы с ЭП постоянного тока. Синтез САУ является одним из основных этапов проектирования электропривода. Целью синтеза является определение структурной схемы системы управления (вида дифференциального уравнения и передаточной функции) и ее параметров (коэффициенты дифференциального уравнения), а также выработка такого конструктивного решения, при котором обеспечивается требуемое качество, а сама система состоит из наиболее простых устройств управления. В процессе синтеза физические элементы системы представляются в виде динамических звеньев, которые описываются математически. На основании математической модели объекта управления подбираются регуляторы и рассчитываются необходимые параметры САУ. Затем строятся динамические характеристики САУ и разрабатывается ее принципиальная схема. САУ электроприводами нашли широкое применение в промышленности благодаря их быстродействию и высокой точности отработки заданных законов движения. Следящая система представляет собой замкнутую систему автоматического регулирования, предназначенную для воспроизведения выходной величины с определенной точностью, изменяющуюся по произвольному, заранее неизвестному закону. Следящие системы характеризуются тем, что задаваемый закон изменения выходной координаты является случайной функцией времени. Функциональная схема объекта управления
Объектом управления является управляемый преобразователь, состоящий из системы управления и вентильного выпрямителя, двигателя постоянного тока и редуктора.
Рис.1.1. Схема объекта управления где ПР – преобразователь; ЭД – двигатель постоянного тока; Р – редуктор; Мс – статический момент.
По справочнику для двигателя 2ПБ112МУХЛ4 определяем следующие параметры:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 352; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.115.42 (0.01 с.) |





















 Структурная схема следящей САУ имеет вид:
Структурная схема следящей САУ имеет вид: - коэффициент обратной связи по току;
- коэффициент обратной связи по току; в установившемся режиме будет соответствовать максимальный ток якоря
в установившемся режиме будет соответствовать максимальный ток якоря  .
. , исходя из этого получаем:
, исходя из этого получаем: (3.1)
(3.1)
 ;
; ; (3.2)
; (3.2) .
. .
. .
. ;
;  ;
; ;
; ;
; ;
; (3.3)
(3.3) .
.
 - регулятор положения пропорциональный.
- регулятор положения пропорциональный. .
. .
. ;
; .
. ;
; ;
; ;
; ;
;
 ;
; , тогда коэффициент обратной связи по положению:
, тогда коэффициент обратной связи по положению: .
.

 ) можно записать:
) можно записать: ;
;  ;
;  ;
;  ;
; 
 ;
; ;
; ;
; получаем:
получаем: (3.10)
(3.10)
 . Здесь же на резисторах R7, R8 реализована обратная связь по ЭДС. Поэтому R7 = R8 =
. Здесь же на резисторах R7, R8 реализована обратная связь по ЭДС. Поэтому R7 = R8 =  Принимаем R7 = R8 =11 Ом. Конденсатор С1 возьмем 0,1 мкФ, тогда
Принимаем R7 = R8 =11 Ом. Конденсатор С1 возьмем 0,1 мкФ, тогда кОм.
кОм.
 Ом.
Ом. Ом;
Ом;
 c. По графику
c. По графику  с.
с. с. По графику
с. По графику  с.
с.


