
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез цифрового управляющего устройстваСодержание книги
Поиск на нашем сайте
Функциональная схема цифрового управляющего устройства САУ показана на рисунке 6.1
Рис.6.1 Функциональная схема цифрового управляющего устройства САУ где ЦВУ- цифровое вычислительное устройство; ЦАП-цифро-аналоговый преобразователь; АЦП-аналого-цифровой преобразователь; Нам необходимо принять время обработки информации цифровым управляющим устройством. Примем
Рис.6.1 Структурная схема объекта управления
На основании структурной схемы можно записать:
Так как система астатическая, то дополнительно вводится координата: Для свободного движения уравнения состояния объекта управления можно записать:
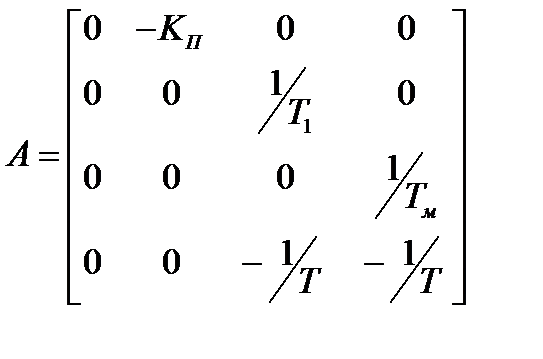
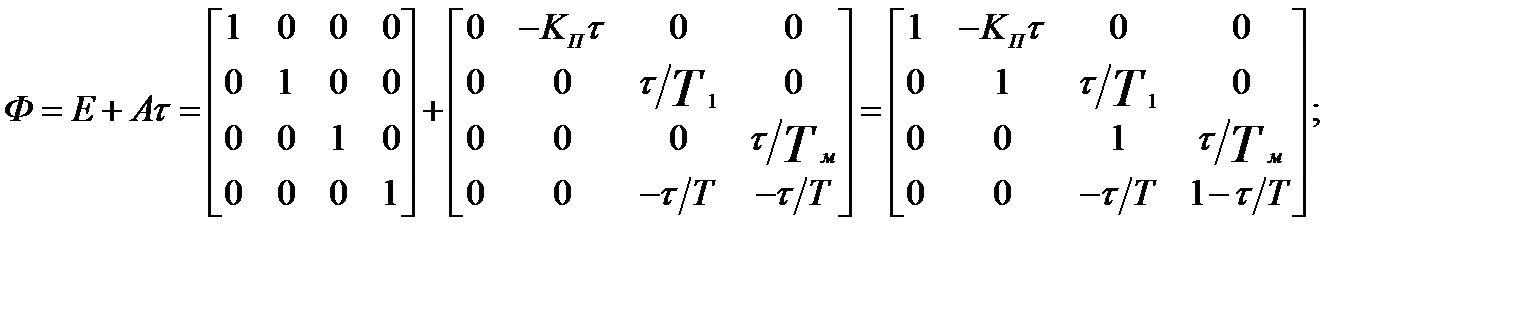
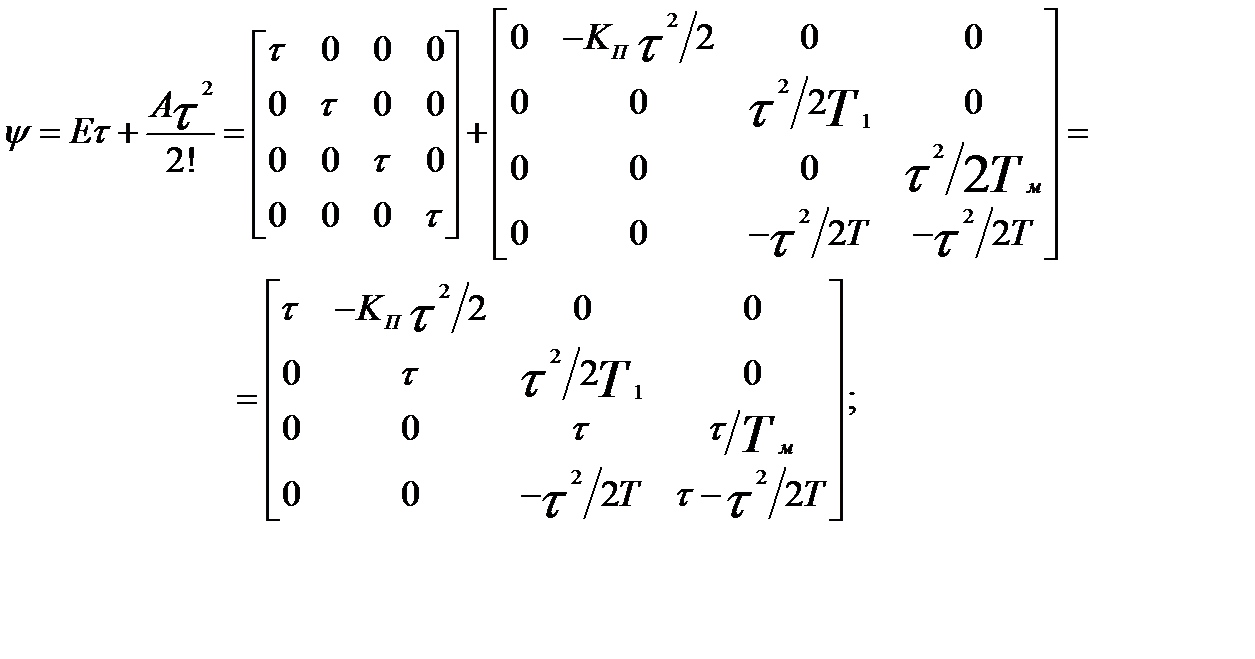
Составим матрицы А, Ф, Аm,y:
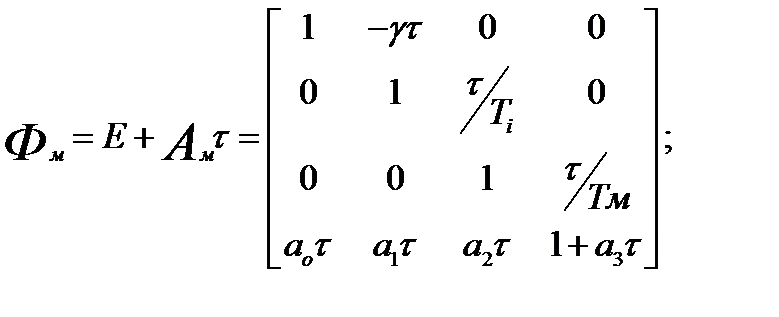
При составлении матриц Ф и y необходимо ограничиться двумя членами разложения:
Эталонная матрица
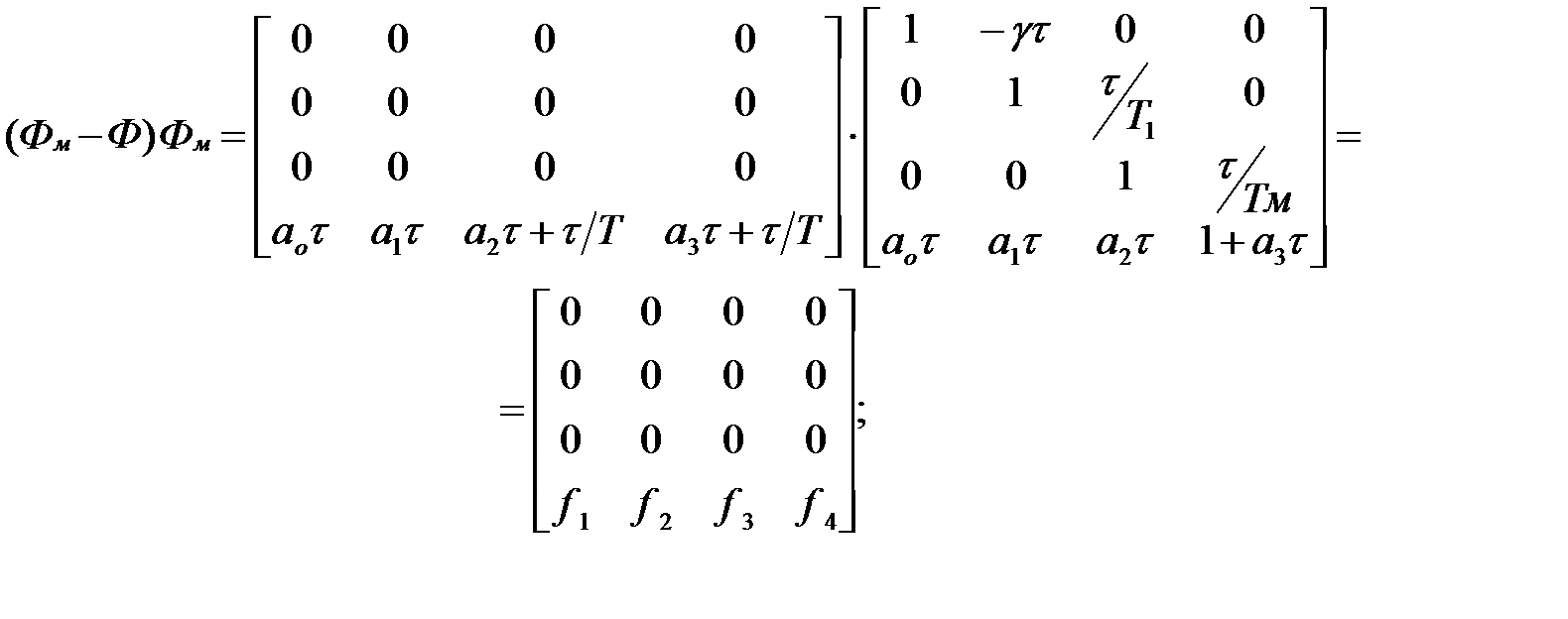
Таким образом получим:
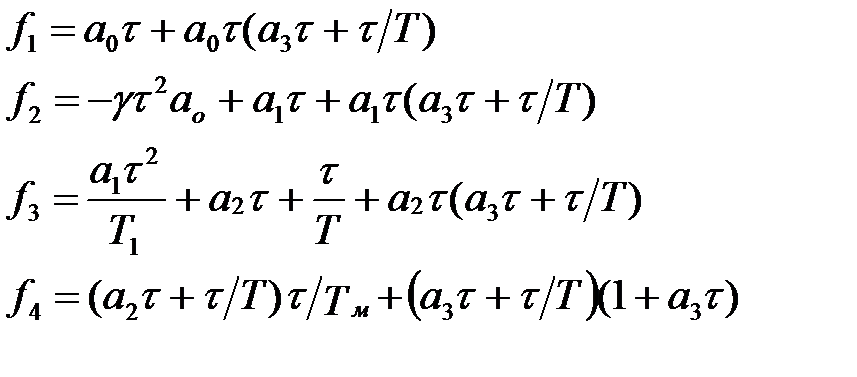
Таким образом получили уравнение:
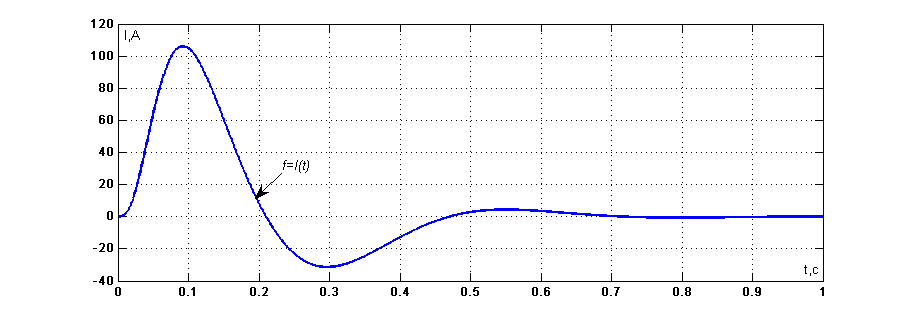
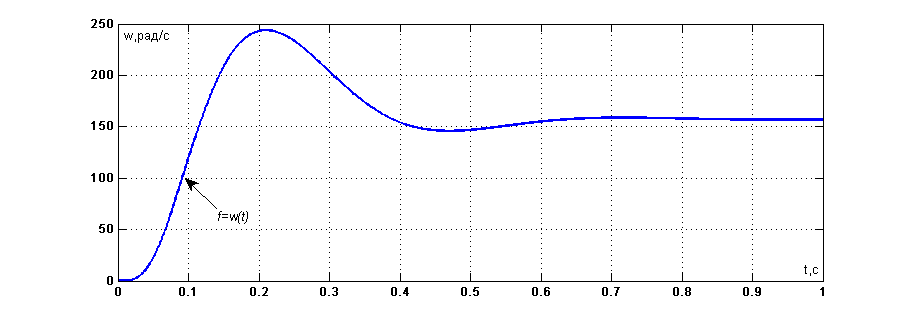
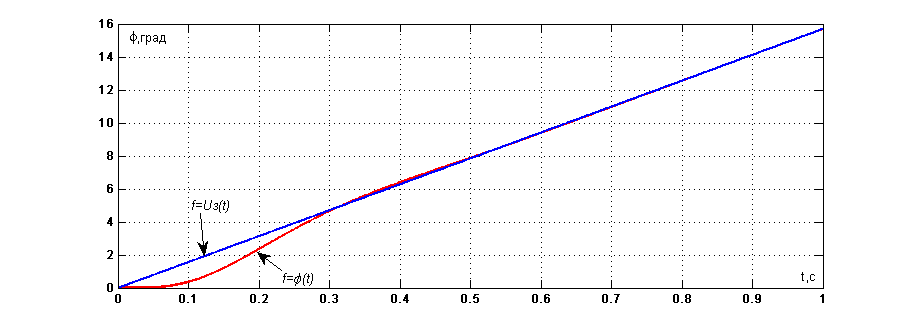
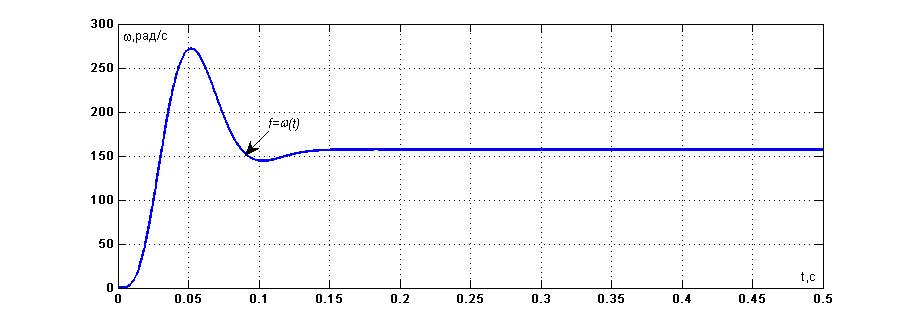
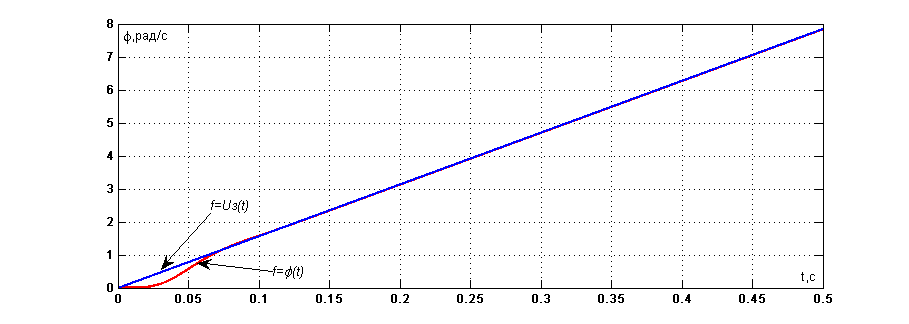
Расчет статических и динамических характеристик системы САУ, синтезированная методом последовательной оптимизации контуров Динамические характеристики следящей САУ методом последовательной оптимизации контуров по заданию представлены в виде графиков:
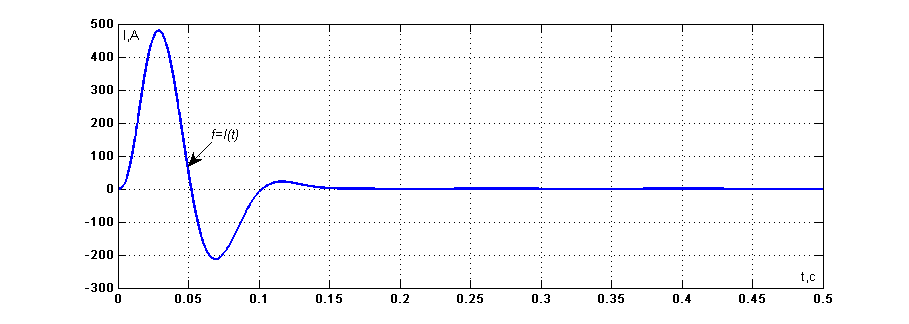
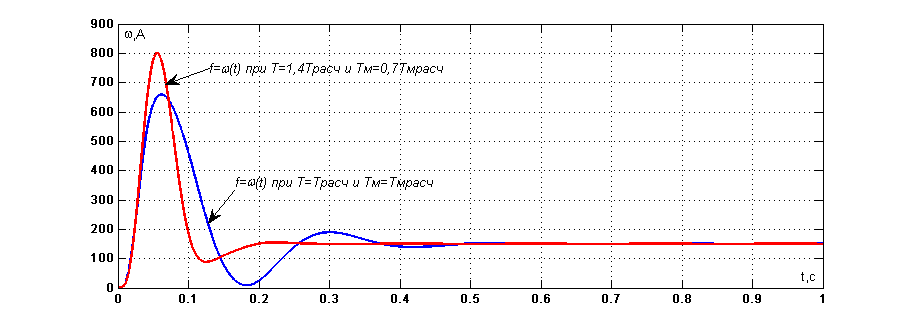
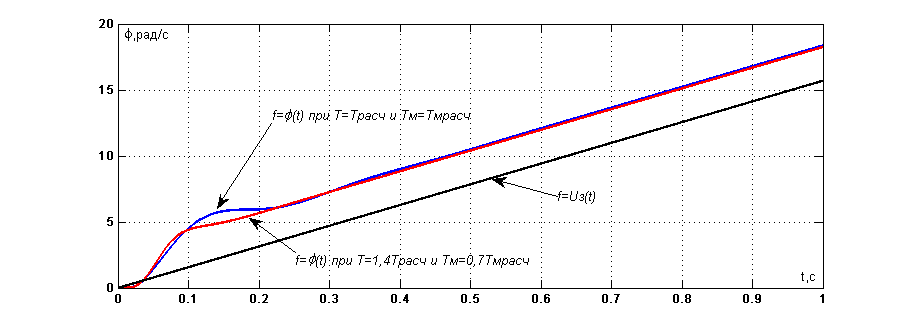
САУ, синтезированная методом модального управления Динамические характеристики следящей САУ методом модального управления представлены в виде графиков:
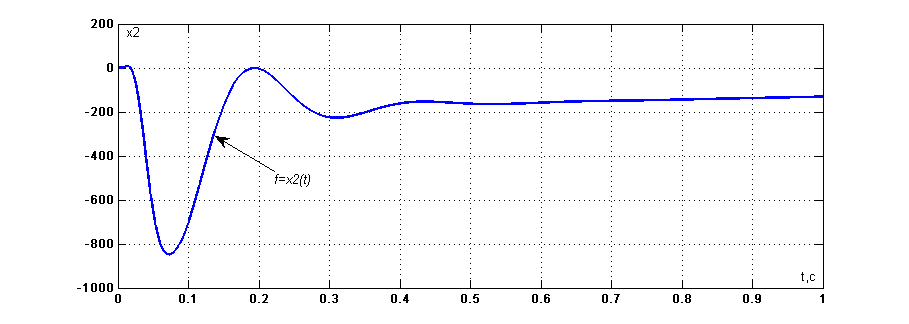
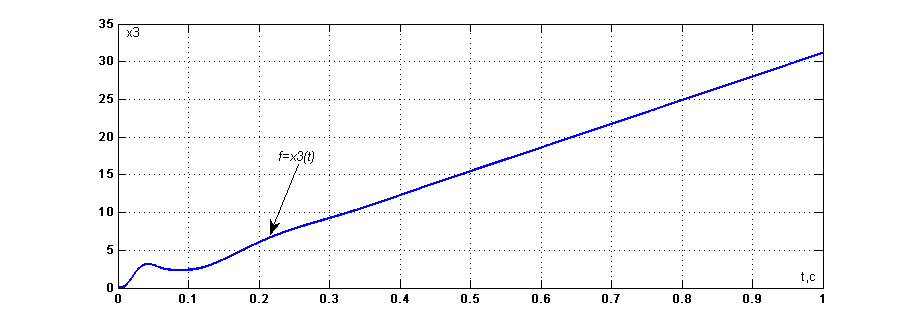
САУ, синтезированная с использованием наблюдателя Динамические характеристики следящей САУ с использованием наблюдателя представлены в виде графиков:
Графики измеренной координаты
Проектирование принципиальной схемы Управляющего устройства Проектирование принципиальной схемы начнем с выбора элементов. Операционные усилители принимаем К140УД5А. Эти микросхемы имеют низкое энергопотребление, обладают достаточной чувствительностью и имеют двуполярное напряжение питания 12В. В качестве логических элементов 2И-НЕ примем микросхемы К555ЛА3, т.к. они менее требовательны к стабильности источника питания.
В качестве реверсивных счетчиков возьмем микросхемы К555ИЕ7. В качестве цифро-аналогового преобразователя используем микросхему К572ПА2. Расчет пассивных элементов схемы начинаем с фотоимпульсного датчика (ФИД). Сигналы с ФИД поступают на элементы DD7.1 и DD7.2. Сигналы представляют импульсы скважностью 0,5 и сдвинутые на 900. На элементах DD6.3, DD6.4, DD7.1, DD7.2 и цепочках R46 C9 и R47 C10 собраны формирователи импульсов. Для работы счетчика достаточно импульса длительностью 1мс. Примем R46 = R47 = 1 кОм, тогда С9 = С10 = На элементах DD5.1-DD6.2 собрана схема определение направления вращения и инверторы. Схема синхронизации построена на элементах DD4.1-DD4.4. Она необходима для того, чтобы одновременно на входы сложения и вычитания реверсивного счетчика не поступали импульсы, т.к. при одновременной подаче импульсов происходит переполнение счетчика. С выхода схемы синхронизации импульсы поступают на реверсивный счетчик из элементов DD1-DD3, соединенных последовательно. Код от интерполятора поступает на преобразователи частота-напряжение ПЧН1, ПЧН2. На преобразователи ПЧН3, ПЧН4 поступают импульсы о блока определения направления вращения. С выходов счетчиков сигнал подается на ЦАП, где двоичный код преобразуется в напряжение. Применена типовая схема включения ЦАП: R1 = 20 кОм; R9 = 13 кОм; R10 = 10 кОм; R11 = 5,1 кОм. Кроме того, на ЦАП подается опорное напряжение 5В. На элементе DA3 реализовано звено
Принимаем R6=820 кОм. R12 = R13 = R14 = R8 = 43 Ом; R16 = Принимаем R16=68 кОм. Номиналы датчика тока:
R21 = 30 кОм; R22 = 15 кОм; R20 = 10 кОм. Элементы преобразователей частота-напряжение используются в соответствии с типовыми схемами. Все резисторы, за исключением R50, типа МЛТ-0,25; конденсаторы К10-73; диоды КД522.
Рис.8.1 Принципиальная схема управляющего устройства Заключение Оценим быстродействие системы, синтезированной методом последовательной оптимизации контуров и методом модального управления. Время регулирования контура положения:
Время регулирования системы синтезированной методом модального управления:
Качество отработки линейного закона перемещения выше в системе, синтезированной методом модального управления. Метод оптимизации контуров основан на ряде допущений, т.е. менее точен, чем метод модального управления. Однако, несмотря на это недостаток, серийные привода выпускаются по системе основанной на последовательной оптимизации контуров, т.к. они более удобны в наладке. Список используемой литературы 1. В.Л Анхимюк, О.Ф.Опейко “Проектирование систем автоматического управления электроприводами” – Минск, “Высшая школа”,1986 2. В.Л.Анхимюк, О.Ф.Опейко, Н.Н.Михеев “Теория автоматического управления” – Минск, 2000
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 262; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.137.150 (0.008 с.) |


 с. За это время информация на входе ЦУУ не изменится. Структурная схема объекта управления показана на рисунке 6.2.
с. За это время информация на входе ЦУУ не изменится. Структурная схема объекта управления показана на рисунке 6.2.
 ;
;  ;
; 


 отличается от матрицы А только строкой коэффициентов
отличается от матрицы А только строкой коэффициентов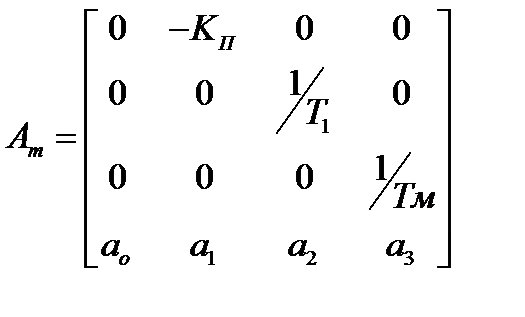
















 ;
;  ;
;  ;
; 


 (t) с помощью наблюдателя:
(t) с помощью наблюдателя: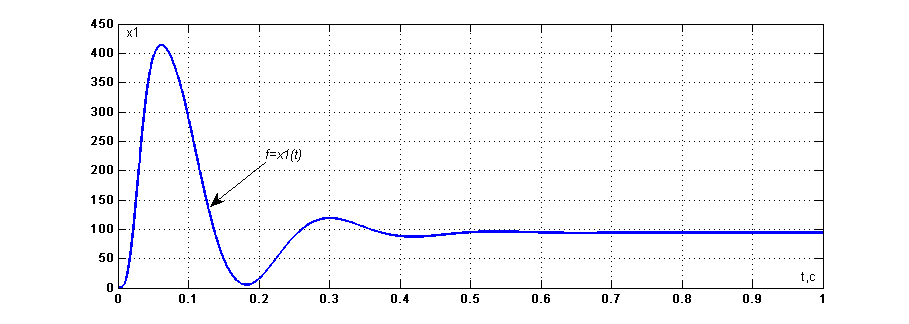

 . Здесь же на резисторах R7, R8 реализована обратная связь по ЭДС. Поэтому R7 = R8 =
. Здесь же на резисторах R7, R8 реализована обратная связь по ЭДС. Поэтому R7 = R8 =  Принимаем R7 = R8 =11 Ом. Конденсатор С1 возьмем 0,1 мкФ, тогда
Принимаем R7 = R8 =11 Ом. Конденсатор С1 возьмем 0,1 мкФ, тогда кОм.
кОм.
 Ом.
Ом. Ом;
Ом;
 c. По графику
c. По графику  с.
с. с. По графику
с. По графику  с.
с.


