
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Математическая модель и определение параметров объекта управленияСодержание книги
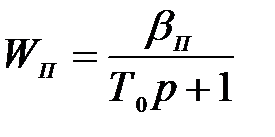
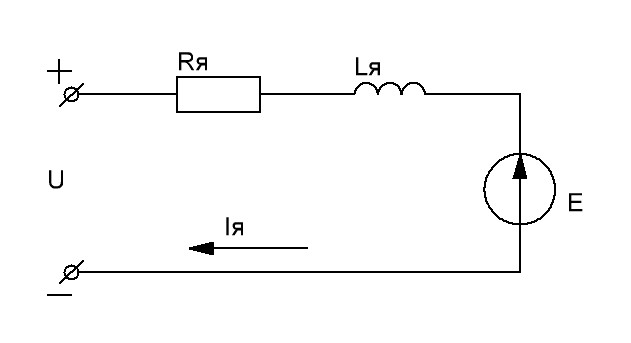
Поиск на нашем сайте Вентильный преобразователь представлен апериодическим звеном с передаточной функцией: Двигатель постоянного тока можно представить следующей схемой замещения:
Рис.2.1. Схема замещения ДПТ Схема замещения описывается следующей системой уравнений:
где RЯ – активное сопротивление якоря; LЯ – индуктивность якоря; M и MC – полный и статический моменты на валу двигателя; J – суммарный момент инерции; w -угловая скорость. При постоянном магнитном потоке:
где СМ и Се – конструктивные постоянные двигателя. С учетом (2.2) перепишем систему (2.1):
где При установившемся режиме
Введем обозначения:
Тогда (2.4) примет вид:
Запишем (2.5) в операторной форме:
На основе системы (2.6) составим структурную схему электродвигателя:
Рис. 2.2. Структурная схема электродвигателя Для следящей САУ редуктор представлен интегрирующим звеном с передаточной функцией
где i – передаточное число редуктора. Тогда с учетом передаточных функций вентильного преобразователя и редуктора составим структурную схему объекта управления.
Рис. 2.3. Структурная схема объекта управления В сопротивлении и индуктивности якорной цепи не учитывается обмотка возбуждения; обмотка добавочных полюсов и сопротивление щеточного контакта учтены в формуле (2.10). Определим номинальный ток:
Определим угловую скорость:
Конструктивная постоянная электродвигателя:
Сопротивление якорной цепи:
где
Электромагнитная постоянная времени:
где
Электромеханическая постоянная времени:
где
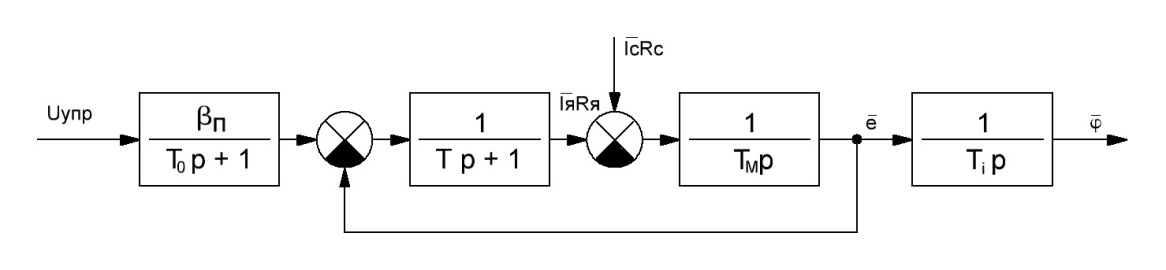
Синтез САУ методом последовательной Оптимизации контуров Сущность метода синтеза заключается в том, что в начале синтезируется контур тока, затем контура скорости и наконец контур положения. Причем эти контура синтезируются из условия максимального быстродействия, что позволяет более качественно отработать закон изменения задающего воздействия UЗ.
Рис.3.1. Структурная схема следящей САУ
· 1 - Астатический контур тока;
Wрт - передаточная функция регулирования тока; · 2 - статический контур скорости; Wрсс - передаточная функция статического регулирования скорости; · 3 - астатический контур скорости; Wрса - передаточная функция астатического регулирования скорости; · 4 – контур положения; Wрп - передаточная функция контура положения.
Расчет контура тока Коэффициент обратной связи по току По условиям коммутации
Регулятор тока пропорционально-интегральный, его постоянная времени принимается равной электромагнитной постоянной двигателя. Структурная схема контура тока представлена на рис. 3.2.
Рис.3.2. Структурная схема контура тока Из структурной схемы можно записать:
Примем корни характеристического уравнения соответствующие техническому оптимуму.
В этом случае справедливо:
Приравняв коэффициенты при одинаковых степенях получим:
Находим постоянную времени астатического звена контура тока:
С учетом проведенных преобразований передаточная функция астатического контура тока примет вид:
|
||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 281; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.137 (0.005 с.) |

 .
.
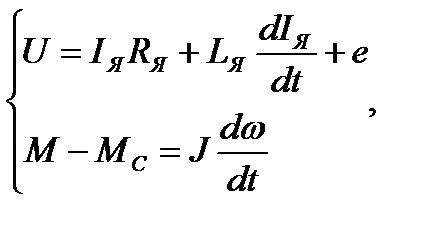 (2.1)
(2.1)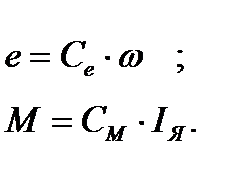 (2.2)
(2.2)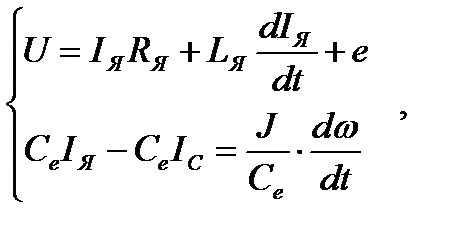 (2.3)
(2.3)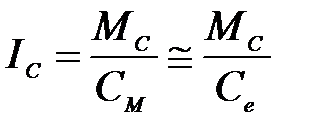 - статический ток.
- статический ток. , тогда (2.3) примет вид:
, тогда (2.3) примет вид: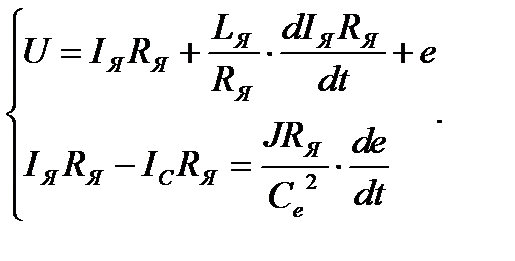 (2.4)
(2.4) - электромагнитная постоянная времени.
- электромагнитная постоянная времени. - электромеханическая постоянная времени.
- электромеханическая постоянная времени.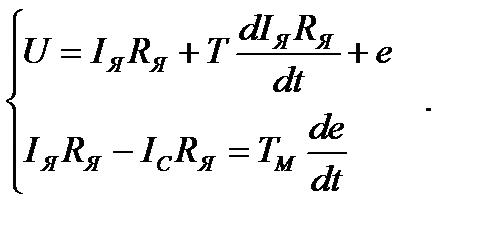 (2.5)
(2.5)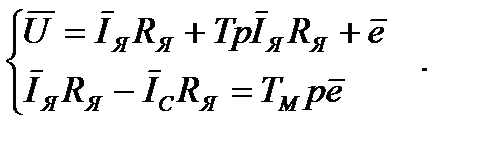 (2.6)
(2.6)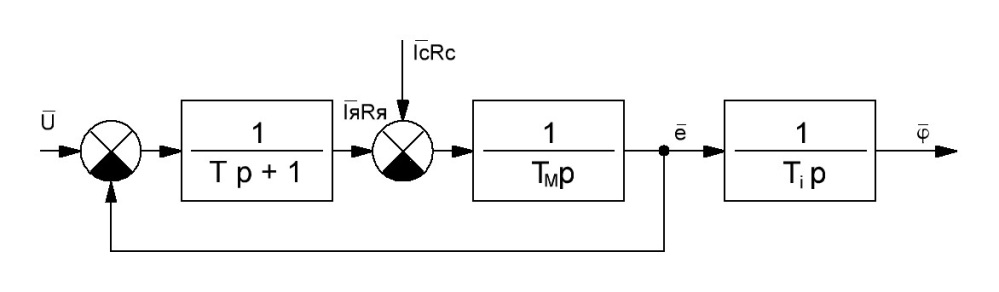
 ,
,
 (2.7)
(2.7) (2.8)
(2.8) (2.9)
(2.9) (2.10)
(2.10) - сопротивление щеточного контакта:
- сопротивление щеточного контакта: (2.11)
(2.11) (2.12)
(2.12) (2.13)
(2.13) (2.14)
(2.14) (2.15)
(2.15) - суммарный момент инерции,
- суммарный момент инерции, (2.17)
(2.17) (2.16)
(2.16)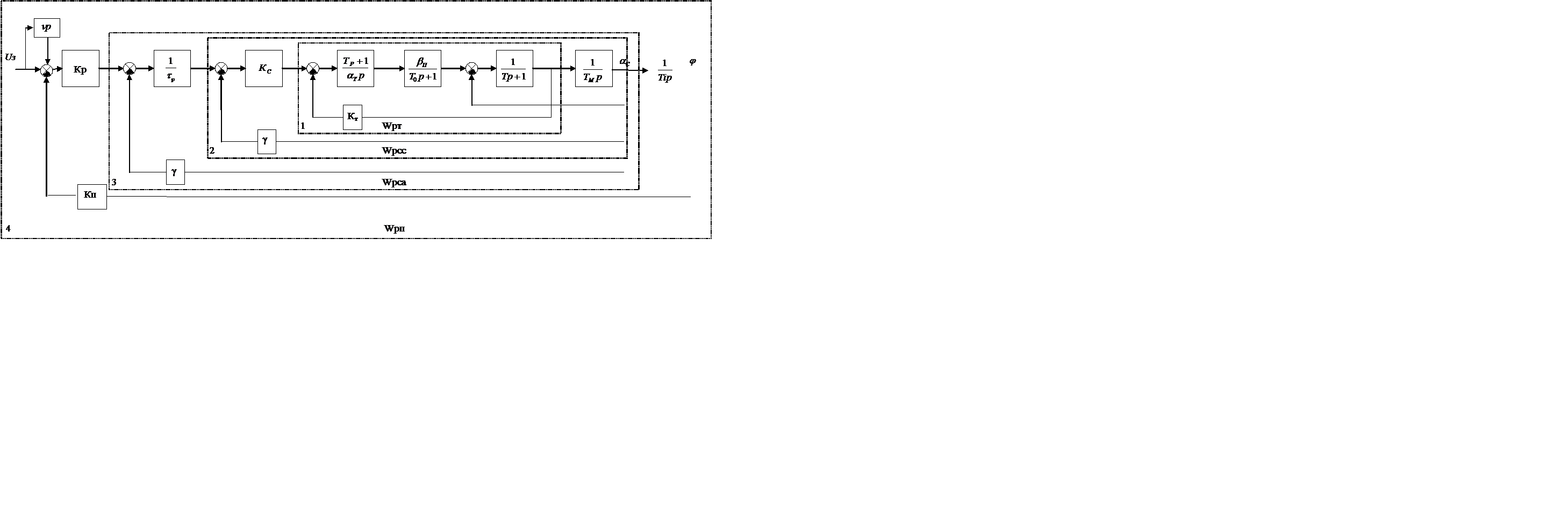 Структурная схема следящей САУ имеет вид:
Структурная схема следящей САУ имеет вид: - коэффициент обратной связи по току;
- коэффициент обратной связи по току; в установившемся режиме будет соответствовать максимальный ток якоря
в установившемся режиме будет соответствовать максимальный ток якоря  .
. , исходя из этого получаем:
, исходя из этого получаем: (3.1)
(3.1)
 ;
; ; (3.2)
; (3.2) .
. .
. .
. ;
;  ;
; ;
; ;
; ;
; (3.3)
(3.3)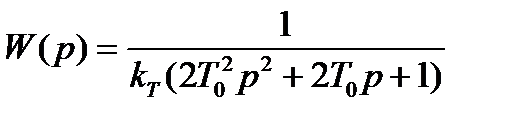 .
.


