Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Нумерация переменных в МИКРОЛЕ ⇐ ПредыдущаяСтр 6 из 6
Для управления переменными ломиконта в автоматическом и ручном режимах его работы, например, с пульта или от ЭВМ, в МИКРОЛЕ введена операция блокировки. Каждая переменная может быть блокирована или разблокирована. Если переменная блокирована, т. е. подчинена оператору или ЭВМ, ломиконт в процессе выполнения программы ПрП изменить ее не может. По отношению к таймеру блокировка означает, что ломиконт в процессе выполнения ПрП не может ни изменить его значения (т. е. включить или отключить), ни присвоить произвольное значение времени. Программа на МИКРОЛЕ состоит из операторов - условных и безусловных. Для сокращения записи вместо ЕСЛИ, ТОГДА, ИНАЧЕ, ВКЛЮЧЕНО (ВКЛЮЧИТЬ), ОТКЛЮЧЕНО (ОТКЛЮЧИТЬ) используют символы Е, Т, И, В, О. Примеры записи фрагментов ПрП имеют следующий вид: Условный оператор Е В ВД034 Если включен вход дискретный 20 Е ВА000 и если значение входа аналогового ВА000 > ВА002 больше значения входа аналогового ВА002 Т О ДВ010 тогда отключить дискретный выход ДВ010 Т АЛГ012 тогда исполнить алгоритм номер 012 И В КБ6 иначе включить ключ блока КБ6 Безусловный оператор 25 АВ 000 Аналоговому входу АВ000=+ВА001 присвоить значение входа аналогового РА001-0190 минус константа 190 151 Алгоритмы являются частью ПО ломиконта, хранимого в модуле постоянной памяти ПЗУ2. При технологическом программировании (вводе ПрП) оператор задает номер нужного алгоритма и параметры алгоритма - его входы, выходы и коэффициенты, исходя из особенностей применения алгоритма в конкретной задаче управления. Алгоритмы, число которых в библиотеке достигает 45, реализуют функции регулирования (например ПИ- и ПИД-законы), динамические преобразования, математические функции, операции с числами двойного формата и с числами формата с плавающей запятой, преобразования форматов, операции переключения, действия с дискретными переменными, функции обмена информацией с другими ломиконтами по цифровому каналу связи и т. п. Для ввода и контроля программы, задания параметров настройки алгоритмов и других операций используют портативный пульт, клавиатура которого показана на рис.51.
Рис. 51. Клавиатура пульта Ломиконта
Клавиши верхнего ряда - режимные, под каждой из них расположен светодиод, указывающий при загорании один из следующих режимов: ОСТ - останов, ПС - пуск, НС - неисправность, ТСТ - тестирование, КП -копирование, НСТ - настройка, ПРП - программирование, АР -автономный режим. Клавиши „левой” группы используют для ввода технологической программы: Е-ЕСЛИ, Т-ТОГДА, И-ИНАЧЕ, ИЛИ-логическое ИЛИ, (-открывающаяся скобка,) - закрывающаяся скобка, ТС - технологическое сообщение, ВСК - выйти из секции, В - включено (включить), О -отключено (отключить), Б - блокировано, = - равно (приравнять), > -больше, < - меньше, „+” - плюс, „-” - минус. Клавиши „средней” группы применяют для задания типа и номера переменных или алгоритма, а также констант: ВД - вход дискретный, АВ - аналоговый выход, КБ - ключ блока, КС - ключ секции, ИМП - импульсный выход, ТМ - таймер, АЛГ - алгоритмы, „.” - десятичная точка, 1...9 - цифры.
Пульт имеет небольшой дисплей (10 строк по 16 символов в каждой), с помощью которого контролируют введенную программу, выдают диагностические сообщения и т. п.
8.3. Димиконты
Дисплейный микропроцессорный контроллер Димиконт Д-110 предназначен для построения распределенных АСУТП на базе ремиконтов и ломиконтов. Димиконт Д-110 состоит из блока управления, двух цветных телевизионных мониторов, клавиатуры ввода информации, клавиатуры оператора-технолога, кассетного накопителя, устройства печати знакосинтезирующего. Димиконт Д-110 обеспечивает работу в режимах оперативного управления, технологического программирования и сервисном. В оперативном режиме Димиконт реализует следующие функции: - сбор и первичную обработку данных о ходе технологического процесса;
- ввод данных осуществляют по последовательному интерфейсу ИРПС от ремиконтов и ломиконтов и (или) через УСО непосредственно от ТОУ; - отображение данных о процессах в ТОУ в режиме реального времени в виде статической, информации (мнемосхемы, таблицы, информационные надписи и т.д.) и совмещенной с ней динамической информации (значения координат в процентах и в абсолютных величинах, в форме графиков, столбиковых диаграмм, таблиц, изменяющихся фрагментов изображений, аварийная сигнализация, расчетные показатели и т. п.); - аварийную сигнализацию и сигнализацию об отклонениях координат ТОУ подачей звукового сигнала, мерцанием или изменением цвета отображения; - вызов данных о течении процесса в ТОУ по иерархическому принципу: от общей информации к частной; - ведение истории процесса управления ТОУ по 128 координатам и параметрам с записью их значений на магнитную ленту кассетного накопителя для последующего просмотра и анализа; - документирование информации о работе ТОУ: автоматический вывод на печать аварийной информации (дата и время отклонения координаты, наименование координаты, ее граничные значения и т. д.), распечатка по вызову оператора буквенно-цифровой копии 1 экрана, протоколов, графиков и др; - ввод даты и коррекция суточного времени; - самодиагностику работы основных узлов Д-110, формирование и отображение сообщений о неисправностях и неправильных действиях оператора. В режиме технологического программирования Димиконта оператор осуществляет: формирование статической информации, выбор вида отображения динамических данных и совмещение их со статическими, назначение характеристик входных сигналов (наименование, абсолютное значение, погрешности и др.), задание иерархии вызова видеокадров и т.п. В сервисном режиме Димиконт обеспечивает вывод на экран команд и данных, системную загрузку данных о конфигурировании (каталоги, библиотеки, списки и т.п.), построчный вывод алфавитно-цифровой информации с экрана на устройство печати, тестовый контроль модулей с документированием результатов и др. К стандартным алгоритмам Д-110 относят программы вида отображения динамических данных (ВОДД). Они предназначены для представления на экране в режиме реального времени динамических данных сг ТОУ. Общее число программ ВОДД может достигать 256. Например, программа ВОДД001 предназначена для отображения в процентной шкале на экране непрерывного сигнала, поступающего на вход димиконта; программа ВОДД002 обеспечивает отображение непрерывного сигнала в физических единицах (м, кг, °С и т.п.); с помощью программ ВОДД00З-006 непрерывный сигнал отображают в виде вертикального столбика и т. д. Библиотека стандартных алгоритмов записана в ПЗУ и сохраняется три отключении сетевого питания Д-110. Конструктивное исполнение Д-110 - шкафное. В шкафу размещают два комплекта Д-110. Габариты шкафа 800×1800×600 мм.
8.4. Приборы, регулирующие программируемые микропроцессорные ПРОТАР
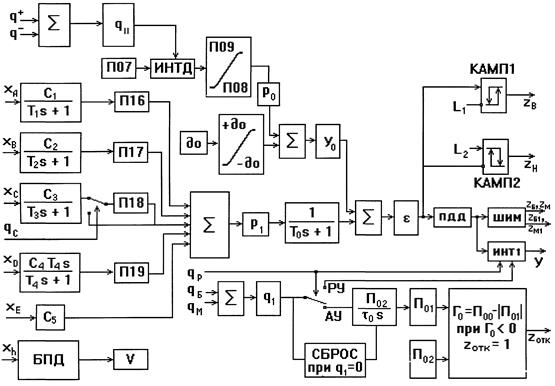
Приборы предназначены для использования в одноконтурных схемах стабилизации координат ТОУ, программного, каскадного, многосвязного регулирования с реализацией сравнительно простых алгоритмов обработки информации. Приборы ПРОТАР выпускают в двух модификациях: со встроенным (ПРОТАР 100) и выносным (ПРОТАР 110) пультом оператора. Их можно использовать в режиме свободно программируемой пользователем структуры или в режиме жесткой структуры, сформированной изготовителем и пригодной для решения типовых задач. Функциональная схема жесткой структуры представлена на рис.52.
Алгоритм жесткой структуры предусматривает: - статическую и динамическую обработку 5 аналоговых входных сигналов - введение задания как с пульта оператора, так и от системы управления - реализацию одного из законов регулирования: ПИД, ПИ, ПД, П - выполнение статической и динамической балансировки; - преобразование диапазона изменения шестого аналогового входного - формирование по заданному алгоритму сигнала отказа zотк.
Рис. 52. Функциональная схема жесткой структуры ПРОТАР- 100
Входные аналоговые сигналыха, xb, xc умножают на масштабные коэффициенты C1, C2, С3фильтруют в апериодических звеньях с постоянными времени T1, T2, Т3и помещают в регистры переменных П16, П17, П18. Сигнал xc дополнительно проходит через ключ, управляемый дискретным входным сигналом qс. Входной аналоговый сигнал xd дифференцируют в узле предварения с постоянной времени Т4,умножают на масштабный коэффициент С4и помещают в регистр переменной П19. Сформированные таким образом переменные П15,..., П19 суммируют друг с другом и с входным аналоговым сигналом хе, который предварительно умножают на постоянный коэффициент С5. Полученную сумму помещают в регистр P1 и фильтруют через апериодическое звено с постоянной времени Т0. Узел формирования задания выдает оперативное задание до= (которое устанавливают с помощью пульта оператора в пределах от - дo до + до)и исходное задание Р0, которое можно устанавливать как с пульта оператора, так и дискретными входными сигналами q+ и q -, поступающими от системы управления верхнего уровня. Последние воздействуют на интегратор задания ИНТ II, изменяя его выходной сигнал в сторону увеличения или уменьшения. Скорость изменения сигнала интегратора задают переменной П07, а пределы изменения - переменными П08, П09. Задание у0 вычитают из отфильтрованного сигнала, эквивалентного значению Pi, образуя сигнал рассогласования Е.
Сигнал Е вводят в программный блок формирования закона регулирования ПДД', включающего узел статической и динамической балансировки. Выход блока ПДД' поступает через программный блок широтно-импульсного модулятора ШИМ на импульсные выходы zm, zб, zm1, zб1 и через интегратор ИНТ 1 и цифро-аналоговый преобразователь - на аналоговый выход у. Таким образом, одновременно реализуют ПИД-закон регулирования с импульсным выходом (совместно с интегрирующим исполнительным механизмом) и с аналоговым выходом, давая пользователю возможность выбрать любой из этих алгоритмов. В режиме ручного управления РУ, задаваемом дискретным сигналом qp, вход интегратора ИНТ 1 отключен от блока ПДД' и подключен к дискретным входам qs, qm, под воздействием которых выходной сигнал ИНТ 1 может изменяться с постоянной скоростью 1%/с в ту или иную сторону, обеспечивая ручное управление ТОУ по аналоговому выходу у. Помимо этого, рассогласование Е подают на программные компараторы КАМП1 и КАМП2 с регулируемыми порогами срабатывания L1 и L2, которые формируют дискретные выходы zВ и zh, реализуя сигнализацию предельных рассогласований верхнего и нижнего уровней либо трехпозиционное (двухпозиционное) регулирование. Входной аналоговый сигнал хh через блок преобразования диапазона БПД подают в регистр переменной U, откуда хh можно использовать для цифровой индикации (например, положения регулирующего органа). Нижний и верхний пределы диапазона изменения хh помещают в регистры переменных V1, V2(на рис.52 не показаны). Блок аварийной сигнализации отказа содержит интегратор с постоянной времени то и блок диагностики отказа, управляющий дискретным выходом zotk. В режиме автоматического управления АУ интегратор под воздействием дискретных входных сигналов qб, qм линейно изменяет выходной сигнал в ту или иную сторону, а при qб = qм = 0 сбрасывает его до нуля. Выходной сигнал интегратора помещают в регистр переменной П01, абсолютное значение которой подается на вход блока диагностики отказа. Переменную П00 вводят на второй вход указанного блока, задавая тем самым порог срабатывания аварийной сигнализации. Рассмотренная жесткая структура позволяет реализовать значительную часть типовых функций контроля и регулирования ТОУ. В режиме свободно программируемой структуры используют широкий набор из 49 функций Fi, (ПИД-регулирование, кусочно-линейное преобразование, алгебраические, нелинейные, динамические преобразования, логические соотношения), из которых пользователь формирует последовательность функций, необходимую для реализации заданного алгоритма управления ТОУ. Все манипуляции по записи программы, заданию коэффициентов и т.п. осуществляют с помощью верхней части встроенного пульта оператора (рис.53), которая содержит 6-разрядный (2×4) дисплей Д и панель ПН с четырьмя кнопками („П-Н”, 0,>,<). С помощью этих кнопок и цифрового дисплея осуществляют программирование, контроль и установку параметров настройки и задания, анализ входных и выходных аналоговых сигналов, выходного аналогового сигнала, входов или выходов программных блоков.
Рис. 53, Внешний вид встроенного пульте прибора ПРОТАР- 100
Нижняя часть встрсенного пульта оператора содержит панель с четырьмя кнопками, служащими для переключения режимов управления (0 - автоматическое; изображение ладони - ручное) и для ручного управления (Δ - управление выходом tв: V - управление выходом zm).
8.5. Программируемый контроллер ПК-И
Контроллер предназначен для автоматизации ТОУ с небольшим числом регулируемых координат. Контроллер ПК-И обеспечивает автоматическое выполнение программы управления ТОУ; ручной ввод данных с клавиатуры; индикацию на данных на однострочном семисегментном дисплее; выполнение логических и арифметических операций. Контроллер ПК-И представляет собой блок-каркас габаритами 470×593×227 мм, имеет 5 посадочных мест, одно из которых занимает модуль процессора, а четыре остальных - проектно-компонуемые модули ввода-вывода. Первый модуль включает собственно процессор типа К580, ОЗУ констант и данных емкостью 2 Кбайт и ППЗУ программ пользователя емкостью 16 Кбайт. Для связи ПК-И с ТОУ используют четыре типа модулей: - ввода-вывода дискретных сигналов ПК-4.100 (до 4 на каркас) с 32 входами и 32 выходами, с оптронной гальванической развязкой; - ввода-вывода аналоговых сигналов ПК-4.200 (до 2 на каркас; с 16 входами и 8 выходами; - ввода-вывода число-импульсных сигналов ПК-4.300 (до 2 на каркас) с 8 входами или 8 выходами с оптронной гальванической развязкой; - гальванической развязки аналоговых сигналов ПК-4.400 (до 2на каркас) с 8 входами. Программы для контроллера записывают на специализированном мнемокоде, содержащем небольшое число простых команд. Алгоритм управления предварительно представляют в виде схемы, близкой по форме к релейно-контактной. Пример описания алгоритма приведен на рис.54, а реализующая его программа - в табл. 6.
Рис. 54. Схема алгоритма управления для микроконтроллера ПК-И
Таблица 6. Запись программы контролльра ПК-И
Контроллер комплектуют программно-отладочным комплексом, содержащем модуль ОЗУ, модуль программатора для ППЗУ, источник ультрафиолетового излучения, программное обеспечение для отладки и ввода программ со стандартного терминала или ЭВМ по интерфейсу ИРПС.
Литература
1. Автоматическое управление в химической промышленности. Под ред. Е.Г. Дудникова. М., Химия, 1987. 2. Балакирев B.C. и др. Экспериментальное определение динамических характеристик объектов управления. М., Энергия, 1967 3. Волгин В.В., Якимов В.Я. К вопросу запаса устойчивости в системах автоматического регулирования тепловых процессов. - Теплоэнергетика, 1972, №4, с.76-78. 4. Гуткин Л.С. Теория оптимальных методов регулирования при флуктуационных помехах. М., Госэнергоиздат, 1961. 5. Ивахненко А.Г., Лапа В.Г. Предсказание случайных процессов.М. Coв.Радио, 1971. 6. Контроллеры регулирующие микропроцессорные ремиконты Р-110, Р-112, Р-120, Р-122. Отраслевой каталог. Вып 6. М., Информприбор, 1987. 7. Кондратьев В.В., Мазуров В.М. Быстродействующий адаптивный ПИД-регулятор с настройкой параметров по методу Циглера-Никольса. Теплотехника, 1994, №10, с. 60-63. 8. Котельников В.А. О пропускной способности эфира и проволоки в радиосвязи М., МГУ. 1973. 9. Куликов Ю.А., Терюшов И.Н. Методические указаhия к выполнению курсовой работы по теории автоматического управления. Казань, КХТИ, 1984. 10. Плютинский В.М. К применению метода расширенных характеристик для расчета автоматических систем регулирования с транспортным запаздыванием. - Теплоэнергетика, 1983, №10, с. 23-26. 11. Полоцкий Л.М., Лапшенков Г.И. Автоматизация химических производств. М., Химия, 1982. 12. Ротач В.Я. Расчет настройки микропроцессорных систем автоматического регулирования. - Теплоэнергетикa, 1994, №1, с 50-58. 13. Ротач В.Я. Расчет настройки ПИД-регуляторов в режиме диалога. –Теплоэнергетика, 1988, №9, с 38-42. 14. Ротач В.Я. Расчет настройки промышленных систем регулирования М., Госэнергоиздат, 1961. 15. Ротач В.Я. Расчет настройки реальных ПИД-регуляторов. - Теплоэнергетика, 1993, №10, с 31-35. 16. Ротач В.Я. Теория управления теплоэнергетическими процессами.: Учебник для вузов - М.: Энергоагомиздат, 1985. 17. Стефани Е.П. Основы автоматического регулирования теплоэнергетических объектов. М., Энергия, 1970. 18. Стефани Е.П. Сборник задач по основам регулирования теплоэнергетических процессов. М. Энергия, 1973. 19. Технические средства автоматизации химических производств: Справ. Изд./В.С. Балакирев, Л.А. Барский и др. - М. Химия, 1991. 20. Цифровые фильтры в электросвязи и радиоэлектронике. Под 21. Широкий Д.К., Куриленко О.Д. Расчет параметров промышленных систем регулирования. М., Энергия, 1982.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 165; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.247.31 (0.058 с.) |
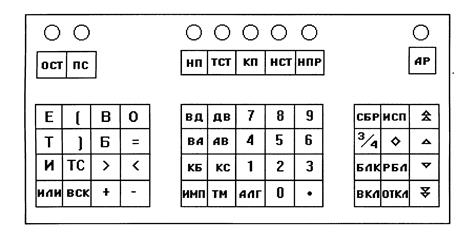

 Клавиши „правой” группы служат для выполнения следующих операций: СБР - сброс, ИСП - исполнить, БЛК - блокировать, 0 - дальше, 3/И - записать/исключить, РБЛ - разблокировать, ВКЛ - включить, ОТКЛ - отключить, ^ - увеличить, v - уменьшить, - увеличить быстрее, - уменьшить быстрее.
Клавиши „правой” группы служат для выполнения следующих операций: СБР - сброс, ИСП - исполнить, БЛК - блокировать, 0 - дальше, 3/И - записать/исключить, РБЛ - разблокировать, ВКЛ - включить, ОТКЛ - отключить, ^ - увеличить, v - уменьшить, - увеличить быстрее, - уменьшить быстрее.