
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Интегральный, или и - закон регулирования. Он описывается уравнением
где Ки – коэффициент пропорциональности, численно равный скорости перемещения регулирующего органа на единицу измерения регулируемой величины. Передаточная функция И – регулятора
Регуляторы, у которых регулирующее воздействие пропорционально интегралу отклонения регулируемого параметра, называют астатическими. И - регуляторы могут устойчиво регулировать работу лишь объектов с самовыравниванием. Пропорциональный, или П - закон регулирования. Описывается уравнением
где Кп - коэффициент усиления регулятора, равен перемещению регулятора при отклонении регулируемой величины на единицу измерения. Передаточная функция П – регулятора
П - регуляторы называют статическими. Они могут устойчиво регулировать работу практически всех объектов. Их отличает простота реализации. Однако они обладают статической ошибкой, величина которой зависит от нагрузки объекта. Пропорционально - интегральный, или ПИ - закон регулирования описывается уравнением:
где Ти – время изодрома. Регулирующее воздействие пропорционально отклонению и интегралу отклонения регулируемой величины. Передаточная функция ПИ – регулятора
ПИ – регулятор называют изодромным. ПИ - регуляторы отличаются простотой конструкции, позволяют устойчиво и без статической ошибки регулировать работу большинства промышленных объектов, вследствие чего получили наибольшее применение в практике. Пропорционально - интегральный закон с введением производной, или ПИД - закон регулирования. Описывается уравнением:
где Тд – время предварения. Передаточная функция
ПИД регуляторы называют регуляторами с предварением. Введение в закон регулирования производной позволяет повысить устойчивость системы регулирования, уменьшить время регулирования, улучшить другие ее качественные показатели.
4.3. Реализация законов регулирования
Сформировать необходимый закон регулирования можно двумя способами. Первый способ состоит в том, что необходимая передаточная функция получается в результате суммирования передаточных функций усилительных, интегрирующих и дифференцирующих звеньев. При втором способе необходимая передаточная функция получается охватом звеньев регулятора звеном обратной связи с определенной передаточной функцией. Рассмотрим эти способы на примере реализации ПИД - закона регулирования.
Из выражения для передаточной функции для ПИД - закона (62) следует, что ее можно получить как сумму передаточных функций трех звеньев: усилительного, интегрирующего и дифференцирующего (рис.16).
Рис.16 При реализации других законов регулирования (П, ПИ, И) нужно использовать соответствующие комбинации звеньев. Основными элементами регулятора, с помощью которых формируется закон регулирования, являются измерительные устройств усилители, исполнительные механизмы и звенья обратной связи. Допустим регулятор состоит из усилителя и сервомотора.
Рис.17
Усилитель - безынерционное звено с передаточной функцией Wy = К. Сервомотор - интегрирующее звено с передаточной функцией Wcm = 1/(Тср), где Тс - время перестановки регулирующего органа из одного крайнего положения в другое. Чтобы реализовать ПИД - закон регулирования, включим обратную связь. Рассмотрим два способа: обратной связью охвачен усилитель (рис.17, а) и обратной связью охвачены усилитель и сервомотор (рис. 17, б). Как известно, передаточная функция звена, охваченного обратной связью, при К >> 1 равна
Для ПИД закона:
Отсюда
Таким образом, в обратную связь нужно включить колебательное звено с коэффициентом усиления Во втором случае:
Это выражение можно привести к следующему:
где Т.е. в обратную связь нужно включить последовательно соединенные апериодическое и реальное дифференцирующее звенья. Таким же образом можно сформировать и любые другие законы регулирования. При использовании промышленных регуляторов на основе микропроцессорной техники (Ремиконт, Ломиконт и др.) необходимый закон регулирования устанавливается программно.
5. Оптимальная настройка регуляторов
5.1. Критерии оптимальной настройки регулятор
Система автоматического регулирования должна удовлетворять двум основным требованиям [14]: 1. Система должна обладать достаточным запасом устойчивости. 2. В пределах запаса устойчивости не менее заданного, качество регулирования должно быть наилучшим в сформулированном смысле. В соответствии с этим расчет оптимальной настройки регулятора состоит из определения в пространстве параметров настроек области, в которой система обладает необходимым запасом устойчивости и нахождения в этой области точки, обеспечивающей наилучшее качество регулирования. Запас устойчивости системы может быть оценен величиной m (степень колебательности) или величиной М (показатель колебательности), которые характеризуют затухание колебательной составляющей переходного процесса и связаны однозначной зависимостью со степенью затухания Ψ:
где A1 и А3 – первая и третья амплитуды колебания. Устойчивость системы автоматического регулирования полностью определяется расположением корней характеристического уравнения. Расположение же корней на комплексной плоскости можно характеризовать двумя величинами: расстоянием α наименьшего корня от мнимой оси и углом β, в который вписываются наиболее удаленные от вещественной оси комплексные корни (рис.18).
Рис.18 Величина α характеризует степень устойчивости. Чем больше α, тем быстрее затухает процесс. Величина β (или γ) характеризует колебательность системы. Чем больше β, тем больше система склонна к колебаниям. Величина m определяется как
Величина М определяется расстоянием максимума АЧХ замкнутой системы от критической точки (-1; j0) и определяется по формуле:
где ωс – частота среза, ωрез – частота, на которой АЧХ замкнутой САР максимальна. В табл. 1 приведены некоторые соответствующие значения параметров Ψ, m и М для САР, описываемых дифференциальными уравнениями не выше второго порядка. Таблица 1.
Учитывая сказанное выше, для обеспечения заданного времени затухания процесса регулирования и заданной колебательности необходимо, чтобы все корни характеристического уравнения были расположены внутри заштрихованной области. Существуют два основных способа расчета оптимальных настроек регулятора, в зависимости от того, какой параметр запаса устойчивости задан: m или М. Если задана степень колебательности т, то расчет ведется методом расширенных амплитудно - частотных характеристик. Если задан показатель колебательности М, то расчет ведется по максимуму АЧХ замкнутой системы.
5.2. Расчет запаса устойчивости методом расширенных амплитудно - частотных характеристик
Расчет системы на заданную степень колебательности производится по расширенным АФХ. [1, 17]. Расширенные АФХ W(m, jω) получаются подстановкой в выражение для передаточной функции W(p) Согласно обобщенному критерию Найквиста - Михайлова, переходный процесс в системе не будет содержать составляющих со степенью затухания менее заданной, если обеспечивается условие:
где Wо(m, jω) и Wp(m, jω) - расширенные АФХ объекта и регулятора.
Это уравнение является исходным при расчете границы запаса устойчивости в пространстве параметров настройки регулятора.
5.2.1. П, И, ПИ - законы регулирования
Для ПИ - регулятора расширенная АФХ имеет вид
Подставив это выражение в (69), разделив мнимую и вещественную части и решив относительно параметров Кр/Ти, Кр, получим в общем виде:
где Ао (m, ω) - расширенная АЧХ объекта, Fo (m, ω) - расширенная ФЧХ объекта. Затем строим кривую в плоскости параметров Кр/Ти, Кр.
Рис.19
Область ограниченная этой кривой и прямыми Кр = 0, Кр/Ти = 0, является областью заданного запаса устойчивости. При m = 0 кривая ограничивает область устойчивости системы. П и И - регуляторы являются частным случаем ПИ - регулятора. Для П - регулятора это точка 2, ω = ω2. Для И - регулятора - точка 1, ω = ω1 (рис. 19).
5.2.2. ПИД - закон регулирования
Расширенная АФХ для ПИД - регулятора имеет вид:
Уравнение для параметров настройки запишутся в виде:
Состояние системы с ПИД - регулятором определяется тремя варьируемыми переменными: Кр, Кр/Ти, Кд∙Тд и граница заданного запаса устойчивости в общем случае изображается поверхностью в 3-х мерном пространстве. В практических расчетах строят семейство кривых равного затухания в координатах { Кр/Ти, Кр } при различных Кд∙Тд. Для каждого случая определяют оптимальные параметры и выбирают наилучшие в результате анализа качества полученных переходных процессов.
5.2.3. Расчет оптимальной настройки
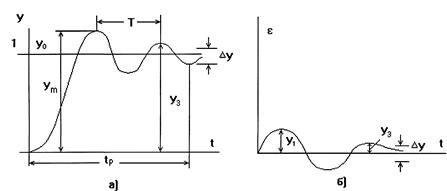
После того как определена область заданного запаса устойчивости, нужно определить в этой области параметры регулятора, которые обеспечат наилучшие качественные показатели, т.е. оптимальные настроечные параметры. Качество процессов автоматического регулирования оценивается переходными процессами при ступенчатом воздействии на входе. По переходным функциям (рис.20) можно получить основные показатели качества регулирования.
Рис.20
К основным параметрам качества относятся: - статическая ошибка Yст, как остаточное отклонение регулируемого
- перерегулирование, представляет собой максимальное отклонение регулируемой величины от заданного значения
Иногда перерегулирование задается в %, - время регулирования tp, определяет быстродействие системы и равно
- степень затухания переходного процесса - отношение разности двух Оптимальные настройки регулятора обеспечивают: - интенсивное затухание переходного процесса; - наименьшее отклонение процесса от заданного уровня; - минимальную продолжительность регулирования. Эти требования тем лучше удовлетворяются, чем меньше площадь, ограниченная кривой переходного процесса (рис. 20, б). Отсюда вытекает интегральный критерий оптимальности настройки регулятора для апериодических или слабоколебательных процессов[14].
Для колебательных процессов используется в качестве оценки
Известная формула преобразования Лапласа связывает функцию времени Y(t) и ее изображение Y(p):
Отсюда следует другое известное соотношение:
При скачкообразном воздействии на систему:
Передаточная функция одноконтурной системы регулирования относительно возмущения х(t) определяется выражением:
Тогда, согласно (78), (79)
Для различных типов регуляторов, с учетом выражений для их передаточных (58), (60), (62) можно получить: для систем с И – регулятором
для систем с ПИ и ПИД регуляторами
где Kf и Кμ - коэффициенты передачи объекта по соответствующим каналам. Из последних формул следует, что для минимизации линейного интегрального критерия следует стремиться к возможно большему значению коэффициента передач И - регулятора или к возможно большему отношению Кп/Ти для ПИ и ПИД – регуляторов
При вычислении линейного интегрального критерия для систем с П-регулятором, прежде чем совершать предельный переход (84) следует из изображения переходной характеристики вычесть изображение ее установившегося значения Yуст/р, где
Отсюда следует, что для минимизации остаточной неравномерности следует установить возможно большее значение коэффициента передачи регулятора. Важным положительным свойством линейного интегрального критерия является его инвариантность относительно выбора возмущений, по каналам действия которых минимизируется критерий. Иначе говоря, выполнение условий (84) гарантирует минимизацию критерия относительно всех действующих на объект возмущений, как контролируемых, так и неконтролируемых. На практике для ПИ - регулятора оптимальную точку настройки берут несколько правее точки, соответствующей максимуму Кр/Ти (рис.19). Примерно можно считать, что ωр = 1.2ω0, где ωр - частота регулирования, а ω0 - частота соответствующая максимальному значению настройки регулятора. Для ПИД - регулятора стремятся иметь максимальное отношение Кр/Ти при отношении времени предварения к времени изодрома близкое к Тд/Ти = 0.5.
Приближенные оценки оптимальных параметров настроек регуляторов даны в [2, 19]. При использовании квадратичного интегрального критерия (76) условие его минимизации записывается в виде [14]:
Интегральный квадратичный критерий не инвариантен относительно возмущений, действующих по различным каналам. Поэтому может сказаться, что параметры настройки, минимизирующие этот критерий при действии одного возмущения, не будут оптимальны по отношению к другим возмущениям. Приближенные оценки оптимальных параметров настроек регуляторов даны в [2, 21].
5.3. Расчет запаса устойчивости по величине максимума АЧХ замкнутой системы
Запас устойчивости системы характеризуется степенью удаления АЧХ от точки {-1, j0} и измеряется двумя параметрами: запасом устойчивости по модулю (С) и запасом устойчивости по фазе (γ) (рис.21).
Степень удаления АФХ разомкнутой системы от точки {-1, j0} может быть определена по величине максимума АЧХ замкнутой системы [14]. Чем больший максимум имеет АЧХ замкнутой системы, тем ближе АФХ разомкнутой системы к точке {-1, j0} и, следовательно, тем меньший запас устойчивости имеет система. На рис.22. 1 - АЧХ системы с неколебательными переходом процессом, 2 - с колебательным переходным процессом, 3 - на границе устойчивости. Колебательность М = Аmax/А0, или (68). Кривая, удовлетворяющая условию М = const является окружностью с радиусом
Эти окружности удовлетворяют свойствам: - угол наклона между касательной, проведенной из начала координат к
- перпендикуляр из точки касания Р касательной и М - окружности к На основании этих свойств М - окружностей для выбора параметров разомкнутой САР, обеспечивающих заданное значение максимума АЧХ замкнутой САР относительно управляющего воздействия, выполняют следующее: - строят в комплексной плоскости АФХ разомкнутой системы (обычно для Кр = 1). - проводят луч ОЕ из начала координат плоскости W(jω) под углом - подбирают окружность с центром на отрицательной ветви действительной оси, касающуюся одновременно АФХ разомкнутой системы и луча ОЕ. - Проводят перпендикуляр к действительной оси из точки касания найденной окружности и луча ОЕ и определяют координату точки пересечения перпендикуляром действительной оси: {-А}. - рассчитывают по соотношению I = 1/А, во сколько раз нужно изменить масштаб построения, чтобы выполнить условие Рассмотрим особенности построения АФХ систем с регуляторами различных типов.
5.3.1. АФХ системы с П – регулятором
Каждый вектор АФХ, не меняя своего направления, увеличивается в Кр раз (рис.24). Устойчивость ухудшается, т.к. кривая приближается к точке {-1, j0}.
Рис.24
5.3.2. АФХ системы с И – регулятором.
Отсюда следует, что для построения W(jω) требуется изменить длину векторов W(jω) в Кр/ω раз и повернуть их по часовой стрелке на угол 90°. Соединяя концы этих векторов кривой, получим график W(jω) (рис. 25).
Рис.25 И - регулятор может устойчиво регулировать только объекты с самовыравниванием. АФХ объектов без самовыравнивания с И - регулятором всегда охватывает точку {-1, j0}.
5.3.3. АФХ системы с ПИ – регулятором
при Кр = 1.
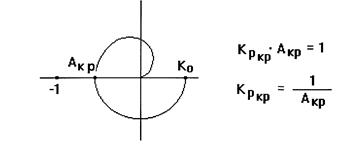
Для получения АФХ разомкнутой системы с ПИ - регулятором при Кр = 1 и некотором Ти следует к каждому вектору характеристики объекта добавить вектор длиной ΔА = А0/(ωТи), повернутый на 90° по часовой стрелке (рис. 26, а). Критическая величина Кр.кр для выбранного Ти равна обратной величине отрезка, отсекаемого характеристикой W(jω) на отрицательной вещественной полуоси (рис. 26, а). Производя построение для различных времен изодрома Ти по изложенной методике и определив соответствующие им Кр.кр можно в плоскости параметров настроек Кр - Ти построить границу области устойчивости и определить оптимальное значение Ти (рис. 26, б).
Рис.26
5.3.4. АФХ системы с ПИД - регулятором.
при Кр = 1.
АФХ разомкнутой системы с ПИД - регулятором строятся также, как и АФХ для ПИ - регулятора. Строго говоря, необходимо строить семейство кривых при различных отношениях Тд/Ти. Однако учитывая, что оптимальным соотношением для ПИД - регулятора является Тд/Ти = 0.5, достаточно построить семейство АФХ при этом значении. Необходимо также учесть, что добавочные векторы
Рис.27
5.3.5. Пример расчета настройки ПИ – регулятора.
Определить параметры оптимальной настройки ПИ - регулятора температуры электропечи, обеспечивающие при запасе устойчивости М = 1.62 минимальное значение линейного интегрального критерия J. Динамические свойства объекта по каналу регулирующего воздействия заданы вещественной и мнимой частями АФХ (табл. 2) при Ко = 84мВ, АФХ системы с ПИ - регулятором определяется уравнением
или при Кр = 1
По изложенной выше методике строим АФХ разомкнутой системы для Кр=1 и Ти=1,1.5,2,3 мин. и выполняем все дополнительные построения (рис.28).
Рис.28
В результате построений получаем:
отсюда
Таблица 2.
Кроме того,
По этим данным строим кривую в плоскости параметров настройки регулятора (рис.28, б). Минимуму линейного интегрального критерия отвечает условие (Кр/Ти)мах. Таким образом, оптимальные настройки определяется значениями
5.3.6. Расчет настройки реальных ПИД - регуляторов
Часто в регуляторах используют реальное дифференцирование, и передаточная функция ПИД - регулятора имеет вид:
где Тд=Кф∙Тф, Кф и Тф - коэффициент передачи и постоянная времени сглаживающего фильтра реального дифференциатора. Такую передаточную функцию имеет, например, регулирующий микроконтроллер ПРОТАР. Разница между идеальным (62) и реальным регуляторами уменьшается с уменьшением Тф и увеличением Кф. Однако из-за действия помех, квантование сигнала по уровню в цифровых регуляторах и т.п. величину Кф на практике приходится выбирать относительно небольшой (обычно не более 5 - 8). При этом расчет настройки по идеальной передаточной функции может иметь значительную погрешность. Преобразуем Wp.p(p) следующим образом:
Передаточная функция реального ПИД - регулятора (95) может быть представлена в виде произведения передаточной функции эквивалентного идеализированного ПИД - регулятора на передаточную функцию сглаживающего фильтра. Расчет оптимальных параметров настройки эквивалентного идеализированного регулятора при заданной Тф может производиться вышеприведенным способом по передаточной функции эквивалентного объекта Wo(р) Wф(р) [15]. Переход от полученных таким образом оптимальных параметров Кр.э, Ти.э, Тд.э к параметрам реального регулятора осуществляется по формулам, вытекающим из (97).
Получаемые по этим формулам параметры будут положительными, если выполняются условия:
На практике чаще задается не значение величины Тф, а значение Кф. В этом случае решение находится методом последовательных приближений. Задавшись начальным значением Тф(0) = 0 по АФХ объекта Wo(jω) производят расчет оптимальных параметров идеализированного регулятора. Эти параметры могут считаться начальным приближением и оптимальными параметрами идеализированного эквивалентного регулятора Кр.э(0), Ти.э(0), Тд.э(0) в итерационной процедуре поиска оптимальных настроек реального регулятора. На каждом к-ом шаге (к=1, 2, 3…) выполняются следующие расчеты: - определяется величина постоянной времени
- по АФХ эквивалентного объекта
определяются параметры идеализированного эквивалентного регулятора Кр.э(к), Ти.э(к), Тд.э(к); - по формулам (97) находятся параметры настройки реального регулятора:
Проверяется, соответствует ли полученная величина отношения Тд(k)/Тф(k) ее заданному значению Кф. Если соответствует, производится расчет оптимального коэффициента передачи реального регулятора
и итерационная процедура оканчивается; в противном случае повторяется расчет по формулам (97) - (99) при увеличении на единицу значения k.
5.4. Расчет настройки регуляторов в режиме диалога
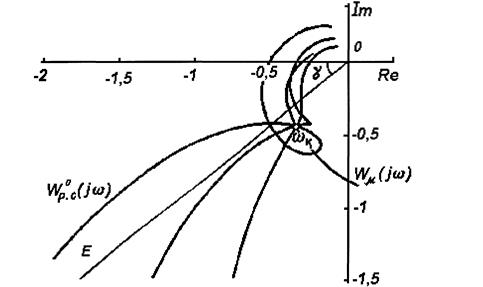
Изложенную выше процедуру расчета оптимальных параметров настроек можно запрограммировать и вычислять на ЭВМ. В [13] предложена методика расчета ПИД - регулятора в диалоговом режиме. Обычно при построении АФХ разомкнутой системы управления W(jω) с ПИД - регулятором фиксируется Тд или Тд/Ти. В диалоговом режиме более удобно фиксировать частоту ωk, при которой W°(jω), соответствующая единственному Кп, пересекается с АФХ объекта Wo(jω), т.е. выполняется условие:
Соответственно, задавая одну из постоянных времени, например Ти, вторую определим по формуле
Вид полученного при этом «пучка» АФХ W°(jω) изображен на рис.29.
Рис.29
Изменяя ωk и Ти, подбирая Ки на основании условия М<Мдоп (Мдоп - допустимое значение М), можно построить границу области требуемого запаса устойчивости, а затем в пределах этой области найти точку, удовлетворяющую критерию (84). Поиск частоты
где φ0(ωγ) - фазочастотная характеристика объекта. Для этой частоты начальные параметры системы находятся из выражений:
Оптимальность параметров проверяется вычислением АЧХ системы. Если резонансный пик АЧХ принял заданное значение, можно попытаться улучшить настройку, повторив расчет для больших ωрез. Увеличение ωрез следует производить до тех пор, пока резонансный пик не начнет превышать допустимое значение. При относительно малом запаздывании в объекте резонансный пик |Wo(jω)| «размывается», а при относительно большом запаздывании появляется второй резонансный пик на более высокой частоте. Появление второго пика в АЧХ замкнутой системы нежелательно, т.к. связано с увеличением чувствительности системы к вариациям параметров, ростом значений и скорости перемещений регулирующих органов, усложнением формы переходных процессов. Если резонансный пик при ωрез = ωγ превышает значение Мдоп, это свидетельствует о необходимости уменьшения ωрез. Такая ситуация возникает при относительно большом запаздывании в объекте. При очень больших запаздываниях может оказаться, что условие М≤Мдоп невыполнимо, в связи с чем часто вынуждены переходить к разомкнутому управлению. В качестве примера рассмотрим расчет настройки ПИД - регулятора для объекта с передаточной функцией
при τ = 0,1 мин, T1 = 1 мин, Т2 = 0.5 мин. Соответствующая АФХ изображена на рис. 30.
Рис.30
Подставив в (102) выражение для ФЧХ объекта
получим ωγ =1.518 рад / мин, Мдоп = 1.5475. Определив, кроме того производную
и используя (103), получим первое приближение к оптимуму настройки Ти=0.837, Тд=0.518, Ки=3.754. Для этого случая АЧХ приведена на рис.31, а переходный процесс при ступенчатом воздействии на рис.32 (под индексом 2). Для ωрез = 1.83 рад/мин параметры настройки равны Ти = 0,757, Тд = 0,562, Ки = 4,801. (кривая 1 на графиках рис.31). Здесь же приведены кривые для настройки ПИ - регулятора(кривая 3) и для сравнения АЧХ системы при т = 0,4 (кривая 4).

Рис.32
5.5. Экспериментальный метод определения настроек регулятора
Как видно из ранее изложенного, графо - аналитические методы определения оптимальных значений параметров настроек регулятора довольно трудоемки, и требуют знания переходной функции объекта регулирования, чего зачастую не бывает. Значительно проще экспериментальный метод. Экспериментальный метод определения параметров настроек регулятора (метод Циглера - Никольса) заключается в создании в замкнутой САР незатухающих колебаний У(t), нахождении их частоты ωкр и вычислений по приближенным формулам Кр, Ти, Тд. Полученные настройки регулятора в большинстве случаев обеспечивают удовлетворительное качество регулирования выходной координаты У(t). Для создания автоколебаний ПИД - регулятора преобразуется в П - регулятор (Ти = ∞, Тд = 0) и постепенно увеличивается коэффициент усиления Кр. При некотором значении Ккр переходный процесс становится незатухающими с периодом Ткр и частотой ωкр = 2π/Ткр. По известным Ккр и ωкр вычисляются в первом приближении оптимальные параметры настроек. Для П -регулятора Кр = 0.5 Ккр. Для ПИ - регулятора Кр = 0.45∙Ккр, Ти = Ткр/1.2. Для ПИД - регулятора Кр = 0.6∙Ккр, Ти = Ткр/2, Тд = Ткр/8. Затем проверяется качество регулирования и при необходимости корректировка значений настроек регулятора. Недостатком данного метода автоматической настройки является прекращение процесса регулирования объекта на время настройки, при этом наблюдается высокая чувствительность к шумам в канале измерения, возникает опасность срыва автоколебаний при действии возмущений. В работе [7] предложена структурная схема (рис.33) адаптивного ПИД - регулятора с настройкой параметров по методу Циглера - Никольса и с частотным разделением каналов управления и самонастройки, что достигается включением двух заграждающих цифровых фильтров в обратную связь контура регулирования.
Рис.33
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 398; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.218.215 (0.236 с.) |
 ,
,
 .
.
 ,
,
 .
.
 ,
,
 .
.
 ,
,
 .
.


 . Поэтому, в первом случае передаточная функция регулятора
. Поэтому, в первом случае передаточная функция регулятора .
.
 или
или
 .
.
 , временем изодрома Ти и временем предварения
, временем изодрома Ти и временем предварения  .
.


 ,
,  .
.

 .
.

 .
.








 .
.


 .
.
 .
.








 , а центр находится на отрицательной вещественной полуоси на расстоянии
, а центр находится на отрицательной вещественной полуоси на расстоянии  от начала координат (рис.23).
от начала координат (рис.23).

 к отрицательной действительной полуоси.
к отрицательной действительной полуоси. . На практике проводят расчет из условия обеспечения величины 2,38 > М > 1,55, что
. На практике проводят расчет из условия обеспечения величины 2,38 > М > 1,55, что






 поворачиваются на 90° по часовой стрелке до частоты ω0, определяемой из условия
поворачиваются на 90° по часовой стрелке до частоты ω0, определяемой из условия  . При больших частотах знак фазового сдвига меняется, т.е. добавочный вектор поворачивается против часовой стрелки. На частоте ω = ω0
. При больших частотах знак фазового сдвига меняется, т.е. добавочный вектор поворачивается против часовой стрелки. На частоте ω = ω0  , введение дифференцирующего звена в закон регулирования приводит к уменьшению фазовых сдвигов, что повышает устойчивость системы. Необходимо также учитывать, что к АФХ системы с ПИД - регулятором можно провести две касательные окружности в области высших и низших частот.
, введение дифференцирующего звена в закон регулирования приводит к уменьшению фазовых сдвигов, что повышает устойчивость системы. Необходимо также учитывать, что к АФХ системы с ПИД - регулятором можно провести две касательные окружности в области высших и низших частот.








 ,
,
 ,
,
 .
.
 - передаточная функция сглаживающего фильтра.
- передаточная функция сглаживающего фильтра. ,
,
 .
.
 ,
,
 .
.
 ;
;

 .
.
 .
.
 , соответствующий «пучку» АФХ, среди которых находится оптимальная АФХ, нужно вести в небольшом диапазоне вокруг частоты ωγ, при которой происходит пересечение АФХ с лучом ОЕ. Частоту ωγ можно найти из условия
, соответствующий «пучку» АФХ, среди которых находится оптимальная АФХ, нужно вести в небольшом диапазоне вокруг частоты ωγ, при которой происходит пересечение АФХ с лучом ОЕ. Частоту ωγ можно найти из условия

 .
.

 ,
,




