
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Все это автоматически учитывает закон управления угловым движением ракеты ПО отклонению от заданного положения и скорости изменения этого отклонения.Содержание книги
Поиск на нашем сайте
δ = а0 υ + а1 Дискретное описание цифрового автомата стабилизации ракеты.
Уравнение автомата стабилизации в квазинепрерывном варианте мы записывали:
C учетом дискретности работы ЦВМ:
Здесь
Численное интегрирование уравнений углового движения ракеты Рассмотрим метод Эйлера численного интегрирования обыкновенных дифференциальных уравнений
Функция f(x,t) может быть как линейной, так и нелинейной. Представим производную в приближенном виде. По определению
и
Тогда, рассматривая ряд точек на временной оси с шагом
Здесь n меняется от 0 до бесконечности и представляет собой дискретное время, измеренное в числе интервалов xn+2= xn+1+ …………………………………. Отметим, что на каждом интервале - шаге Метод Эйлера достаточно груб и в практических случаях применяется редко, поскольку давно придуманы его уточнения, которые, правда, приводят к более сложным выкладкам. Эти уточнения косвенным образом учитывают не только первую производную в начальной точке шага, но и вторую, третью и т.п. Широкое распространение получили методы Рунге – Кутта и Адамса, которые имеются в библиотеках систем программирования. Мы в нашем курсе рассматриваем метод Эйлера, преследуя чисто методологические цели – показать простой и ясный метод численного интегрирования дифференциальных уравнений. Уменьшение ошибки метода связаны с уменьшением шага интегрирования, либо с сокращением интервала интегрирования, так как ошибка накапливается. Для уравнения второго порядка, описывающего колебательное звено
необходимо преобразование его к нормальному виду Коши т.е. к системе двух уравнений первого порядка, разрешенных относительно первой производной. Для чего для данного примера обозначим
Тогда
Также как и ранее для уравнений первого порядка можно записать приближенные соотношения для точки номер n+1 и n
х2(n+1) = x2n+ x1(n+1) = x1n +
Для решения данного уравнения численным методом надо задать начальные условия. Пусть они будут нулевыми x20 = x10 =0 Шаг интегрирования надо выбирать~0,01 от собственной частоты колебаний звена, равной Лекция 8 Исследование качества управления СТС с цифровым управляющим устройством.Точность управления.Случайные и систематические ошибки датчиков системы управления Влияние параметров автомата стабилизации и дискретности его работы на устойчивость углового движения ракеты
Для использования метода Эйлера необходимо систему дифференциальных уравнений третьего порядка представить в виде трех уравнений первого порядка в так называемом виде Коши.
τ Обозначим
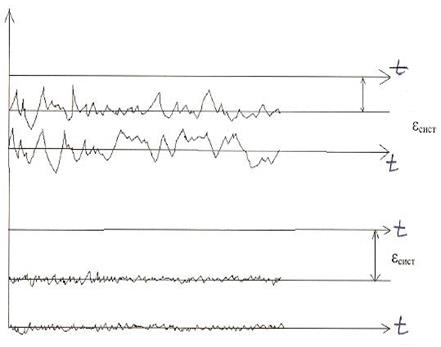
На рисунках показано влияние параметров автомата стабилизации углового положения ракеты (АC)в том числе τ и T, влияние дискретности работы АС h на качество процессов управления. Увеличение h до значений 10 тактов за период собственных колебаний и уменьшение T до значений τ выводят процесс управления на границу устойчивости. Зеленым обозначено изменения по времени угла поворота управляющего двигателя δ. Красным обозначено изменения по времени угла поворота ракеты по тангажу υ. Ступенчатая функция - дискретные значения υд в БЦВМ. Синим обозначено изменения по времени угловой скорости вращения ракеты по тангажу Во всех приведенных случаях значения коэффициентов уравнения углового движения ракеты принимались постоянными и равными Сυυ = - 0,6 1/сек2 (ракета статически неустойчива – центр давления ближе к носу ракеты, чем центр масс) Сυδ = 1 1/сек2 Мв = 0,2 1/сек2
Цель анализа – выбрать параметры прежде всего автомата стабилизации, обеспечивающих приемлемое качество процессов управление. Изменение параметров объекта управления также возможно, но является гораздо более дорогим мероприятием. Результаты получены путем численного интегрирования системы уравнений методом Эйлера. который является простейшим из множества разработанных для этой цели. В принципе, если бы не введенная нами при имитации дискретной работы ЦВМ нелинейность, невысокий порядок записанных уравнений позволил бы даже получить аналитическое решение с небольшими упрощениями. Однако, численное интегрирование позволяет получить решение, не делая упрощений. Широко применяется метод Рунге-Кутты интегрирования обыкновенных дифференциальных уравнений, который даёт более точный результат, но и более сложен. В математических системах например в Mathcad имеется более десяти функций для решения систем дифференциальных уравнений.
Дискретность работы АС равна О.5 сек., Система на границе устойчивости.
Дискретность работы АС равна О.1 сек.,
АС непрерывный и идеальный,
АС непрерывный и неидеальный – с запаздыванием
АС непрерывный и неидеальный – с запаздыванием, Точность управления. Три составляющие, определяющие точность управления Если рассмотреть важнейший показатель качества управления – точность управления, то он имеет три составляющие: 1. динамическую, определяемую передаточной функцией системы и величиной такта дискретизации в управляющей ЦВМ, 2.установившуюся погрешность, 3.погрешность измерения датчиков Установившаяся погрешность устойчивой системы определяется после приравнивания нулю всех производных в приведенной системе при t→∞. υустан = Установившуюся ошибку можно определить и по передаточной функции для этого нужно в выражении для передаточной функции положить s=0. В, так называемых, статических системах статическая (установившаяся) ошибка принципиально присутствует, так как для компенсации постоянно действующего возмущающего момента необходимо приложить равный по величине и противоположный по знаку управляющий момент. Но он не может быть создан иным способом, как в соответствии с законом управления. Но в соответствии с законом управления управляющему моменту соответствует не нулевое значение управляемой координаты.Это значение и есть статическая ошибка, которая тем больше, чем больше компенсируемый возмущающий момент. Как видно из полученного выражения чем больше знаменатель, тем меньше ошибка при том же значении возмущения. Выражение в знаменателе ни что иное, как квадрат собственной частоты углового движения. Когда мы вводили управление с ОС, мы подчеркивали, что ошибка управления во многом будет определяться характеристиками датчиков. Точность, стабильность и повторяемость результатов, быстрота реакции (реактивность) – важнейшие характеристики датчиков, выдающих информацию в управляющий компьютер. В настоящее время, решение компромиссной задачи между высокой чувствительностью датчиков на изменение полезного сигнала и возникающей при этом высокой чувствительности к помехам и шуму, решается за счет цифровой фильтрации шумов во встроенных в датчики компьютеров-контроллеров. Сказанное подразумевает наличие цифрового выхода с датчиков за счет встроенного АЦП, так как устройство самих чувствительных «головок» датчиков все же чаще всего по физике действия имеет непрерывный выход. Точность или погрешность измерения определяется разницей между измеренным и фактическим значением измеряемой величины. Поскольку действительная (фактическая) величина не известна, то точность оценивается на основе априорных калибровки датчиков при эталонных измерениях или апостериорной обработке результатов измерений при функционировании системы.
Случайные и систематические ошибки датчиков системы управления
Ошибки измерения датчиками могут быть случайными и детерминированными. Ошибки могут быть постоянными во времени и переменными, характеризующими нарастающий (вековой) уход датчика, например гироскопического датчика углового положения, автономных генераторов импульсов времени и т.п. Случайные ошибки могут иметь систематическую составляющую – математическое ожидание ошибки по модулю больше 0. Систематические ошибки повторяются при каждом измерении и могут быть связаны с неточностью изготовления датчика и его тарировки, а также с погрешностями (систематическими) его установки на объекте управления. Систематические ошибки можно определить в процессе эксплуатации системы и можно их устранять-компенсировать путем внесения поправок в алгоритм обработки измерений в бортовой ЦВМ. Случайные ошибки возможно успешно фильтровать в той же бортовой ЦВМ, если их изменения во времени существенно по частоте отличаются от частоты изменения полезного сигнала.
Суммирование случайных ошибок и отклонений в линейных системах.
Пусть имеется ряд ошибок у датчика. Эти ошибки являются следствием ряда независимых и случайных причин: конструктивных разбросов, разбросов температуры, разбросов питающего напряжения и т.п. Пусть эти ошибки имеют значения, не превышающие с большой вероятностью величину εi. Учитывая случайный и независимый характер этих ошибок суммирование их нужно проводить по правилам суммирования случайных чисел, которые нам даёт теория вероятностей. Математическое ожидание суммы независимых случайных ошибок равно сумме их математических ожиданий. Дисперсия суммы независимых случайных ошибок равна сумме их дисперсий. Поэтому Предельное отклонение или предельная случайная ошибка относительно математического ожидания ошибки с большой вероятностью равна εпред=3σ. (Для нормального закона с вероятностью 0,997).
Вопросы для повторения Качество процессов управления. Встроенные в систему ЦВМ. Методы анализа качества процессов управления Методы анализа качества процессов управления Устойчивость цифровых систем управления. Характеристическое уравнение и его корни Методы анализа устойчивости систем управления. Преимущества и недостатки использования ЦВМ в контуре управления Математическое описание цифровых систем. Решетчатые функции. Экстраполятор нулевого порядка Пример системы управления с ЦВМ в контуре управления.. Уравнения объекта управления и уравнения цифрового автомата стабилизации Влияние параметров автомата стабилизации на устойчивость углового движения ракет Точность управления в ЦСУ. Три составляющие, определяющие точность управления Случайные и систематические ошибки датчиков системы управления Суммирование случайных ошибок и отклонений в линейных системах.
|
||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 494; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.148 (0.008 с.) |



 и
и  – дискретные значения
– дискретные значения  и
и  , совпадающие с
, совпадающие с  и
и  Дифференциальное уравнение в нормальной форме Коши первого порядка.
Дифференциальное уравнение в нормальной форме Коши первого порядка. 


 (t=n
(t=n  =
=  отсюда
отсюда
 t
t  f(xn+1,t)
f(xn+1,t) ,
,
 = -2
= -2  x2 -
x2 -  x1 + M
x1 + M = x2
= x2 x2n
x2n . В этом случае точность интегрирования будет удовлетворительной.
. В этом случае точность интегрирования будет удовлетворительной. + Сυυ υ + Сυδ δ = Мв
+ Сυυ υ + Сυδ δ = Мв + δ = а0 υ + а1
+ δ = а0 υ + а1 





 д в БЦВМ.
д в БЦВМ.
 , а0=2, а1=1
, а0=2, а1=1
 =0, а0=2, а1=1
=0, а0=2, а1=1


 хороший датчик
хороший датчик .Тогда среднеквадратичное отклонение суммы случайных ошибок
.Тогда среднеквадратичное отклонение суммы случайных ошибок 
 или εпред =
или εпред =  <
< 



