
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Опыт 1.1. Равномерное движение
Цель работы: наблюдение зависимости координаты, скорости и ускорения от времени при равномерном движении. Оборудование: 1. Дорожка с воздушной подушкой. 2. Компрессор. 3. Оптические датчики. 4. Тележка. 5. Компьютер.
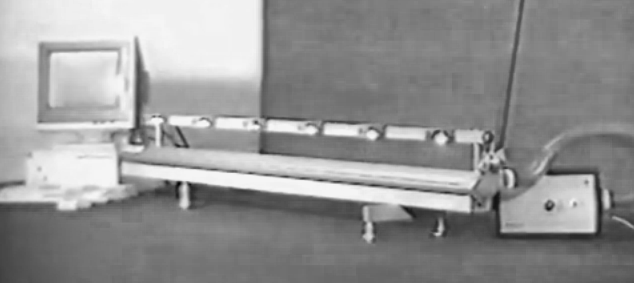
Рис. 2. Демонстрация опыта
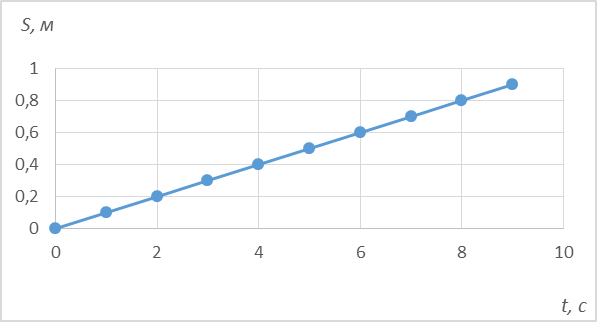
Ход работы На дорожке, установленной горизонтально, можно наблюдать практически равномерное движение тележки, после толчка, который создается электромагнитной пушкой. 1. На экране дисплея наблюдаем линейную зависимость координаты от времени при равномерном движении тележки по горизонтальной дорожке.
Рис. 3. Зависимость координаты от времени
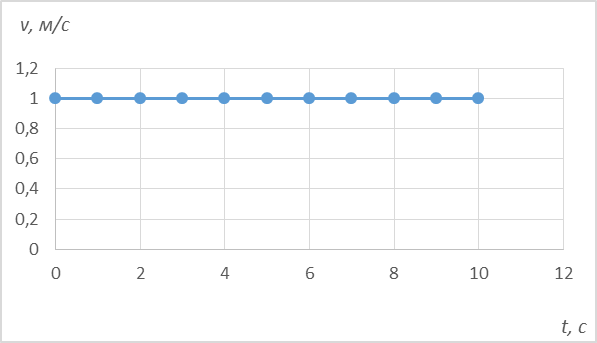
2. Скорость от времени практически не зависит (прямая линия).
Рис. 4. Зависимость скорости от времени
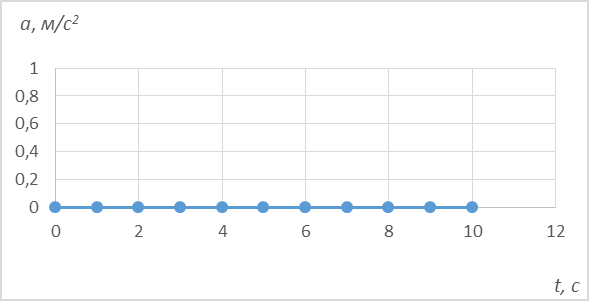
3. Видно, что ускорение при равномерном движении близко к нулю.
Рис. 5. Зависимость ускорения от времени
Вывод: продемонстрированы зависимости координаты, скорости и ускорения от времени при равномерном движении.
Опыт 1.2. Дорожка на воздушной подушке Цель работы: измерить все кинематические характеристики движения дорожки. Оборудование: 1. Дорожка с воздушной подушкой. 2. Компрессор. 3. Оптические датчики. 4. Тележка. 5. Компьютер.
Рис. 6. Демонстрация опыта Ход работы 1. Дорожка на воздушной подушке снабжена большим количеством больших отверстий, через которые выходит воздух, нагнетаемый компрессором, внутрь дорожки. Струи воздуха, выходящие их этих отверстий, создают под тележкой воздушную подушку, которая позволяет тележке двигаться практически без трения. Дорожка снабжена оптическими датчиками, а тележка – выступами, которые прерывают световой поток в датчик. От датчиков сигнал поступает на интерфейс, измеряющий время на прерывании светового потока. Интерфейс соединен с компьютером, который измеряет кинематические характеристики тележки движущейся вдоль дорожки. В зависимости положения тележки от времени, скорости тележки от времени и ускорение тележки от времени.
Рис. 7. Временная диаграмма движения тележки
2. Четыре выступа, имеющиеся на тележке позволяют засекать момент времени t, в который тележка проходит мимо соответствующего датчика и измеряет два интервала времени между пересечениями двумя выступами оптического датчика. Расстояние между выступами Δx1 и Δx2 одинаковы. Таким образом, мы можем определить положение тележки в момент времени x(t):
где Δ t – время, за которое тележка проходят расстояние между серединами промежутков. Вывод: таким образом, мы независимо измеряем все кинематические характеристики движения тележки.
|
|||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 566; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.14.63 (0.004 с.) |
 , (4)
, (4) , (5)
, (5) , (6)
, (6) , (7)
, (7) , (8)
, (8)


