Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Динамика центробежных гидравлического и пневматического регуляторов давления ⇐ ПредыдущаяСтр 6 из 6
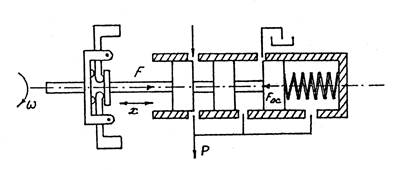
В автоматических приводах фрикционных сцеплений регулятор, осуществляющий изменение давления в исполнительном цилиндре в функции угловой скорости вала двигателя, является основным узлом. от которого зависит качество процесса трогания автомобиля с места. Из предыдущего раздела понятно, что если регулятор имеет большую инерционность, то он не сможет обеспечить оптимальное качество переходного процесса включения сцепления. Очевидно также, что склонность регулятора к автоколебаниям или несоответствие его параметров системе регулирования может нарушать требуемое протекание переходного процесса. Следовательно, при анализе динамических процессов автоматизированного сцепления необходимо более корректно учитывать параметры регуляторов давления. Составим более строгие модели и выполним анализ динамических свойств гидравлического и пневматического регуляторов давления. На рис.6.3 и 6.4 показаны расчетные и структурные схемы гидравлического и пневматического регуляторов давления, содержащих центробежный механизм, гидравлический золотник и пневматический клапан. Структурные схемы регуляторов построены на основе ранее полученных структурных схем центробежного механизма гидравлического золотника и пневматического клапана с учетом их взаимодействия между собой. Особенность» принципа действия и структурной схемы является наличие обратной связи по усилию на
а
б Рис.6.3. Расчетная (а) и структурная схемы гидравлического регулятора давления.
а
б Рис. 6.4. Расчетная (а) и структурная (б) схемы пневматического регулятора давления. Эквивалентные передаточные функции регуляторов давления будут иметь вид:
гидравлический - W(s) = p(s)/w(s) = Kum K3 / (ms2 + vs + c + f) (6.6)
пневматический - W(s) = p(s) /w(s) = Kum Kkl / (ms3 + vs2 + cs + Kklf) (6.7)
где f - площадь поверхности золотника или мембраны,на которую воздействует давление, создавая усилие обратной связи Foc (рис.б.З, 6.4), Тогда условия устойчивости регуляторов имеют вид:
-гидравлического – -m >0, v > 0, c + f > 0; -пневматического – m > 0, v > 0, с > 0, Kkl - f > 0,vc > mKkl.
Из условий устойчивости собственно регуляторов вытекает,чтобез трения (v = 0) они работать не могут, а для пневматического регулятора величина трения должна быть согласована с другими параметрами и обязательно наличие возвратной пружины (с > 0).
Таким образом, при проектировании автоматизированного сцепления в анализе динамических характеристик по структурной схеме (рис.6.2) целесообразно учитывать полученные передаточные функции регуляторов давления, в связи с чем условия устойчивости будут более сложными.
|
|||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 350; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.39.55 (0.004 с.) |