Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электродвигатели, используемые в составе ЭМССтр 1 из 9Следующая ⇒
Электродвигатели, используемые в составе ЭМС
В мире примерно 300 млн. промышленных электродвигателей [42]. Предполагается, что студенты на более ранних курсах ознакомились с устройством и принципом действия основных типов электродвигателей, и этим вопросам здесь уделено незначительное внимание.
Асинхронные электродвигатели Самый распространенный тип электромеханических преобразователей (ЭМП), используемый в двигательном режиме. Асинхронные электродвигатели (АД) составляют: - по доле от числа всех выпущенных электрических машин – не менее 80%; - по доле от установленной мощности всех выпущенных электрических машин – 55-60%. Мощность серийно производимых асинхронных двигателей: от нескольких десятков ватт до 15000 киловатт при напряжениях обмотки статора до 6 кВ [41]. По прогнозам ученых АД останется главным в электроприводе, по крайней мере, до середины XXI века [36]. В иностранной литературе асинхронные машины называют также индукционными машинами, вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Два основных исполнения АД: с короткозамкнутым ротором и с фазным ротором.
АД с короткозамкнутым ротором. Самый распространенный тип конструкции АД (рис.14.1).
Рис. 14.1. АД с короткозамкнутым ротором [21]
Рис. 14.2. Короткозамкнутая обмотка АД [12] и клетка для белки [13] Короткозамкнутая обмотка (рис.14.2 а) ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает "беличье колесо" (рис.14.2 в), поэтому ее часто называют " обмотка в виде "беличьей клетки ".
Основные достоинства: - бесконтактность; - простота и технологичность конструкции; - невысокая стоимость; - высокая надежность.
Основные недостатки а) Недостатки, присущие АД с короткозамкнутым ротором: - сложность регулирования частоты вращения; - большие пусковые токи; - малые пусковые моменты
б) Общие недостатки с АД с фазным ротором: - чувствительность к изменению напряжения сети (момент пропорционален квадрату напряжения); - невысокие значения коэффициента мощности – то же самое имеет место быть и в АД с фазным ротором. На перемагничивание ротора (и его обмотки) асинхронного двигателя, необходимое по принципу действия, затрачивается реактивная мощность (независимо от момента нагрузки). Чем реактивная мощность больше, тем коэффициент мощности меньше. - максимальная частота вращения двигателя, работающего без преобразователя частоты, ограничена частотой сети; для АД, питаемых непосредственно от трёхфазной сети 50 Гц — это 3000 об/мин (n
14.1.1.3. Области применения: 1) До недавнего времени АД с короткозамкнутым ротором использовались только в нерегулируемом электроприводе, где им равных не было [40]. Особенно интересным является применение такого электропривода в традиционно нерегулируемых насосах, вентиляторах, компрессорах. Как показывает опыт, это техническое решение позволяет экономить до 50% электроэнергии, до 20% воды и более 10% тепла [40]. 2) Переход от нерегулируемого электропривода к регулируемому во многих технологиях рассматривается как основное направление развития электропривода, поскольку при этом существенно повышается качество технологических процессов и экономится до 30% электроэнергии. Это определяет перспективы развития частотно-регулируемого электропривода [40]. Для широкого применения в регулируемом электроприводе, АД должен на равных соперничать в этом отношении с коллекторными двигателями постоянного тока (КДПТ). А для этого был необходим эффективный способ регулирования его частоты вращения. Таким способом является частотное регулирование - изменение частоты и величины напряжения, приложенного к статорным обмоткам АД. Практическая реализация этого способа до последнего времени и была затруднена. В настоящее время, благодаря успехам электроники, ситуация кардинально изменилась. Появились качественные и недорогие серийные преобразователи частоты, и частотно-регулируемый асинхронный электропривод стал одним из основных типов регулируемого электропривода, вытесняя из ряда областей регулируемый ДПТ [40].
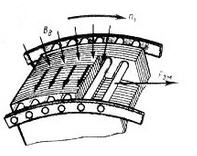
АД с фазным ротором
Часть достоинств и недостатков, свойственных АД с короткозамкнутым ротором, присущи и АД с фазным ротором. Выделим достоинства и недостатки, относящиеся только к АД с фазным ротором.
14.1.2.1. Достоинства: 1) Возможность улучшения пусковых свойств. Подключение дополнительного сопротивления к обмотке ротора при пуске позволяет получить большой пусковой момент и ограничить пусковой ток. Если по мере разгона поочередно отключать группы резисторов, то момент и ток будут изменяться в определенных пределах. Введение добавочных резисторов позволяет реализовать плавный, без больших ускорений пуск двигателя. 2) Возможность дополнительного канала регулирования частоты вращения. Введение добавочных резисторов в цепь ротора позволяет регулировать частоту вращения АД. Необходимо, правда, отметить, что такой способ регулирования частоты вращения обладает рядом существенных недостатков (об этом ниже). 3) Меньшие электрические потери в обмотках при переходных процессах по сравнению с КЗ АД. 4) Меньшее выделение потерь энергии в двигателе (поскольку часть потерь выделяется в добавочных резисторах, которые могут быть вынесены за пределы двигателя). Это может быть востребовано в АД, в которых необходимо реализовать повышенное сопротивление цепи ротора (актуально для АД с большой частотой включения, при которой АД с КЗ ротором не проходят по нагреву или не дают требуемых характеристик динамического торможения). В этих случаях в цепь ротора на постоянной основе включают резисторы с сопротивлениями 0,15-0,4 от номинального. Получается как бы АД с КЗ ротором, но с вынесенными электрическими потерями в роторе [53].
Недостатки: 1) Худшие показатели по стоимости, массе и габаритным размерам по сравнению с АД с короткозамкнутым ротором. При одинаковом исполнении и одинаковой синхронной скорости по массе он на 8-10% тяжелее, а по стоимости на 30-50% дороже. 2) Худшие показатели по надежности. Наличие скользящих контактов снижает надежность АД с фазным ротором и усложняет эксплуатацию.
Области применения Этот тип АД применяется значительно реже, чем АД с короткозамкнутым ротором. АД с фазным ротором находят применение в тех областях, где востребованы их свойства, относящиеся к достоинствам, а именно, там, где: 1) регулирование скорости осуществляется в относительно небольших пределах (напр. привод подъемного крана); 2) необходим плавный пуск; 3) требуются хорошие тормозные качества; 4) требуется ограничение токов в переходных процессах. То есть в приводах с тяжелыми условиями пуска и в механизмах, работа которых связана с частыми пусками и торможениями. Пример: крановый привод [40]. Отметим, что эти задачи можно было бы выполнить и при частотном управлении АД с короткозамкнутым ротором, но более сложным и дорогостоящим образом. И там, где хочется эти задачи выполнить пусть не так качественно, но с наименьшими затратами, применяют АД с фазным ротором.
Серийные АД Как правило, АД выпускаются большими сериями. Серия – это группа однотипных машин различной мощности с параметрами и характеристиками, подчиняющимися определенным законам [7]. Серия АИ – асинхронные интернациональные (единый стандарт для стран – членов СЭВ) Двухфазные АД Асинхронный двухфазный электродвигатель имеет на статоре две обмотки, оси которых сдвинуты в пространстве на 90 мех. градусов. На эти обмотки подается напряжение, сдвинутого по фазе на 90 эл. градусов. Применяются в следящих приводах в качестве исполнительных двигателей. Особенности двухфазных АД связаны с требованиями, предъявляемыми к исполнительным двигателям: 1) Линейность механических характеристик и устойчивая работа в широком диапазоне изменения скоростей вращения. Для выполнения этих условий двухфазные исполнительные АД выполняются с повышенным критическим скольжением, что обеспечивается повышенным сопротивлением ротора. 2) Высокое быстродействие. Для выполнения этого требования ротор в ряде конструкций АД выполняется тонкостенным (имеющим малый момент инерции).
Однофазные АД Применяются в бытовой технике (поскольку в бытовых условиях в наличии имеется только однофазная сеть). Достоинства: Общие для всех асинхронных двигателей: простота конструкции, бесконтактность и, как следствие, высокий ресурс и нетребовательность к обслуживанию. Недостатки: а) Нулевой пусковой момент (для пуска таких АД применяют дополнительные пусковые элементы – пусковые обмотки). б) Невозможность получения частоты вращения выше 3000 об/мин при частоте напряжения питании 50 Гц без использования преобразователя частоты в) Худшие удельно-массовые показатели по сравнению с трехфазными АД: мощность однофазного АД составляет не более 70% от мощности трехфазного АД в том же габарите. г) Однофазные АД имеют более низкую перегрузочную способность по сравнению с трехфазными АД. д) Низкий КПД.
Варианты пуска однофазных АД а) с помощью пусковой обмотки повышенного сопротивления, отключаемой сразу после разгона ротора; б) с помощью конденсатора (отключаемого после пуска или, у конденсаторных АД, включенного все время работы).
Время подключения пусковой обмотки к сети обычно не превышает 5 сек. Двигатели с пусковой обмоткой повышенного сопротивления просты по конструкции и дешевы, не имеют дополнительного фазосдвигающего элемента. Двигатели имеют достаточно хорошие пусковые характеристики (кратность начального пускового момента — до 1,5), однако кратность пускового тока достигает 10 и более. К недостаткам двигателей данного типа следует отнести пониженную надежность по сравнению с конденсаторными двигателями из-за возможного выхода из строя пусковой обмотки. Для улучшения пусковых характеристик последовательно с пусковой обмоткой включается пусковой конденсатор, наличие которого приводит к увеличению сдвига фаз и пускового крутящего момента. После пуска конденсатор отключается, поэтому все остальные характеристики двигателя сохраняются такими же, как и у двигателя с пусковой обмоткой повышенного сопротивления.
Синхронные двигатели Не путать с вентильными двигателями на базе синхронных машин. У СД частота вращения ротора определяется частотой вращения магнитного поля статора (частотой напряжения статора): n =60 f / p. У ВД наоборот: частота вращения магнитного поля статора (частота напряжения) определяется частотой вращения ротора f = pn /60. Синхронные двигатели (как и вентильные двигатели) почти всегда (исключение – микродвигатели) работают при многофазном питании обмоток статора, создающих вращающееся магнитное поле.
Достоинства 1) Стабильность частоты вращения в синхронном режиме (частота вращения не зависит от момента нагрузки). 2) Коэффициент полезного действия синхронных двигателей на 1—2 % выше, чем асинхронных [4]. 3) Возможность реализации большего воздушного зазора. В АД зазор должен быть малым, поскольку от этого существенно зависит реактивная составляющая тока статора. Вследствие большей величины воздушного зазора добавочные потери в стали и в клетке ротора синхронных двигателей меньше, чем у асинхронных [9], выше надежность [53], так как меньше вероятность задевания ротора о статор при нестандартных ситуациях. 4) Синхронные двигатели могут работать, не обмениваясь с сетью реактивной мощностью (т.е. с коэффициентом мощности, равным 1). Если необходима выработка реактивной энергии для сети, то СД в режиме перевозбуждения могут отдавать реактивную мощность в сеть (работать при опережающем токе). Для синхронных компенсаторов это единственная функция. В результате улучшается коэффициент мощности сети, уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях [9]. Синхронные двигатели с cosφн = 1 по своей стоимости и потерям энергии всегда имеют преимущество перед асинхронными двигателями, снабженными конденсаторными батареями для компенсации коэффициента мощности до cosφ = 1 [9]. 5) СД менее чувствительны к колебаниям напряжения сети.
Это обусловлено тем, что максимальный момент синхронного двигателя пропорционален U, a у асинхронного двигателя U 2. 6) Б о льшая перегрузочная способность М макс/ М ном по сравнению с АД. Отметим, что ее можно еще более увеличить за счет повышения тока возбуждения (например, при кратковременном повышении нагрузки). Дополнительно выделим достоинства и недостатки СД с постоянными магнитами. 1) Сравнительно высокие энергетические показатели (отсутствие потерь в ОВ) [5]. 2) Большая удельная мощность на единицу массы [5].
Недостатки 1) Конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей [9]. 2) Синхронные двигатели с электромагнитным возбуждением должны иметь источник для питания обмотки возбуждения постоянным током: возбудитель (электромашинный или тиристорный) или иное устройство [9]. 3) Синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором [9]. 4) Главный недостаток - сложность пуска. В отсутствие вращения средний момент на валу синхронного двигателя равен нулю. Электромагнитный момент, создающийся от взаимодействия вращающегося магнитного поля статора и магнитного потока неподвижной ОВ или магнита, меняет свое направление два раза за период переменного тока. Во время положительного полупериода вращающего момента ротор из-за своей инерционности не успевает тронуться с места и поспеть за вращающимся магнитным полем статора, и попадает под действие тормозного полупериода момента, направленного в противоположную сторону. Чтобы электродвигатель запустился, нужно довести его до частоты вращения, близкой к синхронной, то есть нужно раскрутить ротор в сторону вращения магнитного поля, создаваемого статором [5].
Способы пуска СД 1) При помощи вспомогательного двигателя, который также называют разгонным, или пусковым. В качестве него может использоваться, например, АД. Пусковой АД выбирается с числом полюсов на два меньшим, чем число полюсов запускаемого СД. Мощность разгонного АД составляет 5-15% [19]. Недостатки: громоздко, неэкономично, пускать можно СД только при малой нагрузке [19]. Данный способ в настоящее время практически не используется. 2) Асинхронный пуск синхронного двигателя (наиболее распространен). Для его реализации следует предпринять три действия: а) на роторе размещается дополнительная короткозамкнутая обмотка. Она может быть уложена в пазах или в специальных отверстиях полюсных наконечников (рис.14.4). Ее роль могут выполнять сами массивные полюсные наконечники. Для этого на торцах они соединяются пластинами [19].
Рис.14.4. Короткозамкнутая обмотка СД для асинхронного пуска [45]
б) ОВ отключается от источника питания (чтобы она не создавала магнитный поток). Потому что этот магнитный поток, взаимодействуя с вращающимся магнитным полем статора, создает при пуске тормозной момент, препятствующий вращению ротора. в) ОВ замыкается на сопротивление: R п=(8-12)· R ов [19]. В ином случае большая ЭДС, наводящаяся в ОВ при пуске, приведет к большим перенапряжениям на зажимах. Принцип. Вращающееся магнитное поле статора, пересекая проводники короткозамкнутой пусковой обмотки, индуцирует в ней ЭДС и токи (так же, как это происходит и в АД). То есть, в момент пуска двигатель работает как асинхронный. При взаимодействии токов в короткозамкнутой обмотке с магнитным полем статора образуется электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приблизится к частоте вращения поля статора (s около 0,05), ОВ подключают к источнику питания. Двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, ЭДС и токи в ней не индуцируются, асинхронный пусковой момент становится равным нулю [26]. Недостаток: большие пусковые токи (в 5-7 раз больше номинального значения). Пуск мощного СД может вызвать значительное падение напряжения сети, что отражается на работе других потребителей. Для уменьшения пусковых токов применяют пуск при пониженном напряжении сети (понижение с помощью автотрансформатора) [39]. 3) Частотный пуск с помощью преобразователей частоты. В чем заключается проблема у СД при пуске? Ротор не успевает устремиться за вращающимся магнитным полем статора. Путь решения – при запуске СД постепенно увеличивать частоту напряжения (и скорость вращения вращающегося магнитного поля статора) от 0 до номинального значения. При этом темп увеличения частоты нужно выбрать таким, чтобы с одной стороны ротор успевал вращаться за полем статора, а с другой стороны, чтобы пуск осуществлялся за приемлемое время. Используется для запуска СД с возбуждением от постоянных магнитов, в которых на время пуска нельзя отключить магнитный поток.
Области применения СД 1) Нерегулируемые электроприводы большой мощности с продолжительным режимом работы, т.е. когда не требуются частые пуски, остановки и регулирование скорости вращения. Торможение этих двигателей, в основном, на выбеге [56]. Р н > 200 кВт [9], Р н > 300 кВт [16] и до Рн = 50 000 кВт [9]. При меньших мощностях более предпочтительны АД. При Рн > 300 кВт выгодно использовать синхронные двигатели с cos φH = 0,9 (перевозбуждение) и при Рн > 1000 кВт — с cos φн = 0,8 [9]. Синхронные двигатели обычно выполняются с возбудителем, посаженным на один с ними вал. Поэтому при малых мощностях они менее выгодны, чем асинхронные двигатели. Но, начиная со 100 кВт, а при низких частотах вращения и с меньшей мощности, синхронные двигатели в ряде случаев следует предпочесть асинхронным двигателям. Применение в системах возбуждения полупроводниковых выпрямителей вместо машинных возбудителей позволяет получить достаточно экономичные синхронные двигатели и при сравнительно небольших мощностях [19]. В последние годы положение существенно изменилось вследствие применения современных материалов (постоянные магниты) и средств управления (ключи на относительно большие токи и напряжения и т.д.). Электропривод с синхронными двигателями стал управляемым, существенно расширился диапазон мощностей, что позволило ему занять ведущие позиции в станкостроении, робототехнике, гибких производственных системах и т.п. 2) В качестве синхронных компенсаторов. Гистерезисные двигатели Гистерезисный двигатель – это бесконтактный ЭД, в котором вращающий момент возникает за счет явления магнитного гистерезиса при перемагничивании вращающимся полем статора ферромагнитного материала ротора. ГД относятся к классу синхронных двигателей.
Устройство Статор ГД подобен статору обычной электрической машины переменного тока с распределенной в пазах обмоткой. Обмотка статора, как правило, трехфазная. Ротор ГД не имеет явно выраженных полюсов и какой-либо обмотки. Либо весь ротор, либо его поверхностная часть выполняется в виде цилиндра из материала с особыми свойствами (активный гистерезисный слой). Для снижения потерь от вихревых токов активная часть ГД, как правило, шихтуется. Свойства гистерезисного слоя: - магнитотвердый материал с относительно низкими значениями коэрцитивной силы - 2-30 кА/м [1]; Для сравнения, распространенные в синхронных машинах с постоянными магнитами магнитотвердые материалы имеют следующие значения коэрцитивной силы: SmCo – 560 кА/м; NdFeB – 830 кА/м. Для электротехнической стали: 30-90 А/м. - петля гистерезиса материала близка к прямоугольной форме. Наибольшее применение в ГД нашел сплав викаллой (сплав кобальта, ванадия и железа). Сплав викаллой содержит 52-54% кобальта, до 14% ванадия, остальное - железо. Материал ротора с такими свойствами в отличие от классических постоянных магнитов не является магнитом изначально. Он становится магнитом только после намагничивания током статора ГД, что происходит уже во время пуска двигателя.
Принцип действия Напомню. В двигателях с постоянными магнитами магниты, как правило, намагничиваются предварительно перед сборкой ротора. В гистерезисных двигателях материал ротора предварительно не намагничен: он намагничивается током статора. То есть северные и южные полюса образуются на роторе в результате воздействия на него поля статора. Материал ротора обладает гистерезисом. Сущность гистерезиса заключается в отставании изменения магнитной индукции В Р в магнитотвердом материале ротора от изменения напряженности Н Р внешнего намагничивающего поля статора. То есть полюса образуются с некоторым запаздыванием. Между вектором тока статора I и вектором потока ротора Ф возникает угол γ. Выражение для момента: М=k I Фsin γ.
Основные достоинства ГД: - наличие пускового момента, устойчивая работа в асинхронном режиме, автоматический вход в синхронизм и работа в синхронном режиме; - простота и надежность конструкции: --- отсутствие вращающихся обмоток и конструкционных полюсов на роторе; --- материал активной части ротора обладает высокой механической прочностью, допускающей большие частоты вращения; --- малые температурные коэффициенты линейного и объемного расширения материала ротора, обеспечивающие механическую прочность конструкции в широком диапазоне температур; --- принципиальная симметричность конструкции ротора, облегчающая балансировку; - бесшумность; - малый пусковой ток I п/ I ном=1,2...1,5. В диапазоне мощностей от долей ватта до нескольких десятков ватт гистерезисные двигатели имеют наименьшие размеры [4].
Основные недостатки ГД: - низкий уровень энергетических характеристик (особенно в режимах запуска): малые коэффициенты мощности cos j = 0,2-0,4 и КПД = 0,2-0,5; - высокая стоимость магнитотвердых материалов; - нестабильность характеристик, обусловленная нестабилизированным магнитным состоянием ротора; - склонность к качаниям при резких изменениях нагрузки. - Области применения ГД ГД нашли широкое применение в маломощных управляемых приводах и в системах автоматического управления. Их используют: - в авиации, в объектах навигации, в маркшейдерских устройствах для привода гироскопов; - в атомной энергетике, в пищевой, химической и медицинской промышленностях для привода центрифуг, центробежных распылителей и турбомолекулярных насосов; - в устройствах записи и воспроизведения информации для вращения дисков и магнитных головок, для перемещения ленты в киноаппаратах, фототелеграфах и магнитофонах; - в счётчиках времени и в программных механизмах часовой промышленности: - в качестве муфт, тахогенераторов, демпферов [44].
Основные достоинства 1) Более простые способы регулирования частоты вращения. 2) Большой пусковой момент и перегрузочная способность М макс/ М ном.
Основные недостатки 1) Наличие щеточно-коллекторного узла (низкий ресурс – малый срок службы, радиопомехи, возможность искрения и ограничения по эксплуатации). 2) Худшие по сравнению с АД массогабаритные показатели.
Основные показатели Основная серия – 4П. Мощность: от долей ватта до десятков тысяч киловатт. Диапазон регулирования скорости вращения Wmin/Wmax: - двигатели с нормальным регулированием: 1:5; - широко регулируемые двигатели: 1:1000.
Области применения Там, где наиболее востребованы достоинства ДПТ: хорошие регулировочные свойства и большая перегрузочная способность. Станочный привод, железнодорожный и морской транспорт, производственные роботизированные комплексы, металлургическое производство и др.
Направления развития ДПТ Развитие ДПТ шло и идет в следующих направлениях: 1) Повышение перегрузочной способности М макс/ М ном [4]. 2) Расширение диапазона регулирования частоты вращения Ωмакс/Ωмин [1,4]. При этом создаются высокоскоростные машины, приспособленные для питания от полупроводниковых преобразователей с микропроцессорным управлением [1]. 3) Расширение диапазона мощностей ДПТ с возбуждением от постоянных магнитов с высокими магнитными свойствами. 4) Улучшение динамических свойств [4], в том числе за счет снижения момента инерции [1]. 5) Улучшение виброакустических показателей [4] – снижение вибраций и шумов [1]. 6) Увеличение номинальной мощности двигателей при тех же высотах осей вращения [1] (повышение удельной мощности на единицу массы [4]). 7) Увеличение надежности и срока службы [1,4]. Пункты 6) и 7) в частности могут быть достигнуты: - за счет использования новых изоляционных и магнитных материалов; - за счет внедрения в производство двигателей с коллекторами из углеродных материалов и с твердой смазкой коллекторов (например, из дисульфида молибдена MoS 2) [1]. При добавлении дисульфида молибдена в смазочные материалы обе трущиеся металлические поверхности покрываются защитными слоями молекул дисульфида молибдена, которые свободно скользят относительно друг друга. Таким образом, исключается непосредственный контакт металла с металлом. Значительно уменьшается трение и перегрев деталей в зонах трения, особенно при экстремальных нагрузках, и замедляется износ металлических деталей. 8) Унификация технологического оборудования с процессами изготовления АД.
Рис. 14.7. Схема и упрощенные кривые изменения основных величин в коллекторном двигателе переменного тока [37]
В ряде случаев обмотка возбуждения разделяется на две части, включаемые с разных сторон якоря, что позволяет снизить радиопомехи. При подключении электродвигателя к сети переменного тока по обмоткам возбуждения и якоря протекает ток, возбуждающий пульсирующий магнитный поток Ф. В результате взаимодействия магнитного потока Ф и токов в обмотке якоря I возникает крутящий момент М=с Ф I, и электродвигатель начинает вращаться. Момент М имеет все время одно направление, т.к. одновременно с изменением направления магнитного потока возбуждения изменяется и направление тока в обмотке якоря. Если переменным током питать коллекторный двигатель параллельного возбуждения, то вследствие большой индуктивности обмотки возбуждения, ток возбуждения будет значительно отставать от напряжения. В результате между током якоря и потоком возбуждения окажется большой угол сдвига, и среднее значение момента станет небольшим. Изменение направления вращения двигателя осуществляется переключением концов обмотки возбуждения или обмотки якоря. Сравнение двух вариантов электропитания: При переменном токе магнитная система двигателя оказывается менее насыщенной, чем при постоянном токе. Ток якоря в первом случае больше, чем в КД постоянного тока из-за появления реактивной составляющей и увеличения активной составляющей, вследствие возрастания потерь в стали. По этим причинам КПД двигателя при переменном токе меньше, чем при постоянном [18]. Сравнение с однофазным АД (другим электродвигателем, широко используемым в бытовых электроприборах): Основное достоинство: возможность обеспечения частоты вращения выше 3000 об/мин при частоте питающего напряжения 50 Гц без использования преобразователя частоты. Основной недостаток: наличие щеточно-коллекторного узла. Конструкция универсальных коллекторных двигателей сложнее, чем у асинхронных двигателей и двигателей постоянного тока; это усложняет их эксплуатацию и снижает надежность, стоимость коллекторных двигателей переменного тока больше стоимости асинхронных двигателей с КЗ ротором [23]. Из-за того, что трансформаторная ЭДС в коллекторных двигателях переменного тока остается нескомпенсированной, она создает добавочный ток, замыкающийся через щетки. Это ухудшает коммутацию машины и может вызвать опасное искрение и значительные радиопомехи, особенно при пуске, когда трансформаторная ЭДС достигает большой величины из-за увеличенных значений пускового тока и потока возбуждения. По этой причине коллекторные машины переменного тока средней и большой мощности не получили широкого применения [18]. В универсальных КД малой мощности трансформаторная ЭДС невелика и практически не ограничивает его нагрузку, как это имеет место в более мощных машинах. Однако срок службы щеток, коллектора и всей машины при работе при переменном токе сокращается по сравнению со сроком службы на постоянном токе [18]. Отечественная промышленность выпускает универсальные коллекторные двигатели серий УЛ, МУН, УМТ, ДТА-4, УВ, М-1Д, ЭП, УД, Д2-03, ЭПП-1 и др [22].
Вентильные двигатели Краткий принцип действия В любом электродвигателе вращающий момент создается в результате взаимодействия магнитного поля ротора и тока статора. В ВД ток в фазных обмотках статора формируется с учетом величины магнитного потока, который пронизывает эти фазы. Этот магнитный поток зависит от положения ротора. Информация о положении ротора поступает с датчика положения ротора. Система управления обрабатывает эти (и другие управляющие) сигналы, поступающие с датчиков, и формирует сигналы для управления ключами инвертора. В итоге ток протекает в той фазе, ток в которой создает наибольший момент.
Сходство и различия с КДПТ По характеристикам ВД является аналогом коллекторного двигателя постоянного тока. Функции коллектора у ВД выполняет инвертор, а функции щеток – датчик положения ротора. Действительно, и коллектор и инвертор изменяют направление тока в проводниках секции обмотки якоря при переходе их из зоны действия полюса одной полярности в зону действия другой полярности. Информацию о том, какой полюс в данный момент времени взаимодействует с фазой, в коллекторных двигателях (у которых положение полюсов фиксировано) дает положение неподвижной щетки, а в ВД (у которых полюса перемещаются) – сигнал с датчика положения ротора. У коллекторных ДПТ секции обмотки якоря присоединяются к коллекторным пластинам, а ВД через стойку инвертора из двух управляемых полупроводниковых ключей непосредственно к источнику питания постоянного тока. Полная идентичность в характеристиках наблюдалась бы, если число стоек инвертора было равно числу пластин коллектора. На практике наиболее распространенным вариантом является трехфазный ВД и инвертор с тремя стойками ключей. Вследствие этого, в ВД наблюдается пульсация электромагнитного момента. Это можно причислить к недостаткам ВД.
14.5.5. Общие основные достоинства ВД: - бесконтактность и отсутствие всех негативных свойств, связанных с щеточно-коллекторным узлом, присущих коллекторным ДПТ; - простые способы регулирования частоты вращения в широком диапазоне; - большой пусковой момент и перегрузочная способность. Таким образом, ВД обладает основными достоинствами коллекторных ДПТ и АД и вместе с тем у него отсутствуют их основные недостатки.
14.5.6. Общие недостатки ВД: - пульсация электромагнитного момента (с которой, однако, можно бороться); - необходимость в позиционной обратной связи (усложнение конструкции и схемы управления).
Датчики положения ротора Информация о положении ротора может поступать от явновыраженного датчика положения ротора (ДПР) или выявляться косвенно, путем обработки фазных напряжений (бездатчиковое управление). При явно выраженном исполнении ДПР содержит: - сигнальные (управляющие) элементы, располагающиеся на вращающейся части двигателя; - чувствительные элементы, расположенные на неподвижной части. Сигнальный элемент вырабатывает один из видов энергии (магнитной, световой, электрической – в зависимости от типа сигнального и чувствительного элемента). При достижении СЭ определенного углового положения он входит во взаимодействие с чувствительным элементом, то есть бесконтактно воздействует на него энергией своего физического поля. В ЧЭ происходит преобразование этой энергии в электрический сигнал. Этот электрический сигнал поступает в систему управления инвертором и используется для управления коммутатором ВД. Существует большое разнообразие ДПР. ДПР индуктивного типа, содержащие катушку индуктивности, подключенную к источнику тока высокой частоты. При повороте ротора меняется степень насыщения магнитной системы датчика, изменяется индуктивность обмоток, что позволяет получить сигнал о положении ротора. Недостаток: низкая технологичность конструкции, относительно большие габаритные размеры, потребность в источнике переменного тока высокой частоты. Оптические ДПР, состоящие из светоизлучающего элемента, фоточувствительного приемника и непрозрачного диска с отверстиями. Наибольшее распространение получили гальваномагнитные ДПР на основе датчиков Холла. Выходное напряжение с датчика Холла определяется магнитным потоком, пронизывающим элемент Холла. Достоинства: Высокая чувствительность, работа в широком диапазоне рабочих температур (-60°С - +150°С), простота конструкции. Обычно элементы Холла устанавливаются либо в пределах статора специальной магнитной системы ДПР, либо в пределах магнитной цепи двигателя.
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 333; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.85.76 (0.163 с.) |


 в)
в)
 ), что не всегда бывает достаточно.
), что не всегда бывает достаточно. Рис. 14.3. Эскиз конструкции АД с фазным ротором [12]
Рис. 14.3. Эскиз конструкции АД с фазным ротором [12]