Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
С использованием справочных материалов
При наладке промышленных САР нашли широкое применение упрощенные методы расчета настроечных параметров типовых АР. Их простота обусловлена несложным математическим описанием ОР и справочным материалом (формулами и номограммами), позволяющими рассчитать параметры АР в несколько арифметических действий. Но итоги расчета рассматривают в значительной мере как приближенные /13, 32, 41, 43, 44, 45, 47, 52, 58, 59/. Чаще других используют метод параметризации по переходной характеристике ОР. Его применяют в тех случаях, когда кривая разгона ОР подобна характеристикам, изображенным на рисунках 3.3 и 3.4. Следовательно, динамические свойства ОР должны описываться выражениями вида (3.3) и (3.4):
Большинство промышленных ОР названным требованиям вполне соответствуют. Для таких ОР настроечные параметры АР рассчитывают по формулам, сведенным в таблицу 3.8.
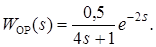
В рассматриваемом случае параметризацию АР проводят в следующем порядке: 1) определяют по кривой разгона объекта эквивалентный ОР в виде (3.3) и (3.4); 2) определяют желаемый тип процесса регулирования по рисункам 3.13 – 3.16 с учетом требований технологического регламента; 3) определяют закон регулирования также с учетом требований технологического регламента; 4) рассчитывают искомые параметры АР по формулам таблицы 3.8. В качестве примера достаточно рассмотреть параметризацию ПИ‑регулятора названным методом. ПФ объекта регулирования известна
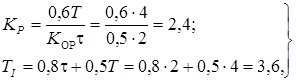
Согласно технологическому регламенту процесс регулирования, вызванный ступенчатым возмущающим воздействием, должен иметь минимальную длительность. Поскольку ПФ и параметры ОР известны (K ОР = 0,5; T = 4; t = 2) и задан ПИ-закон регулирования, необходимо выбрать тип процесса регулирования (рисунки 3.13 – 3.16). Единственное требование технологического регламента обеспечить t р = min реализуется при апериодическом характере переходного процесса (рисунок 3.13). Согласно таблице 3.8 настроечные параметры ПИ-регулятора
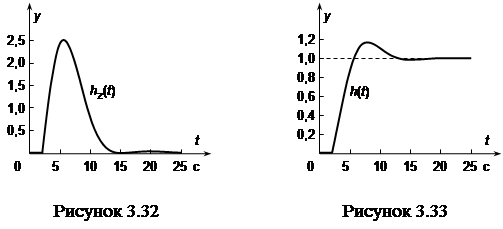
где TI – время изодрома ПИ-регулятора, см. (3.13). На рисунке 3.32 показана переходная характеристика САР hz (t), полученная по каналу возмущающего воздействия z (t). Управляющее воздействие g (t) = 1(t) вызывает реакцию системы h (t), изображенную на рисунке 3.33. Достоинством рассмотренного метода считают его исключительную простоту. В инженерной практике простота заметно компенсирует затраты на "доводку" системы до необходимого качества регулирования. По упрощенной методике быстро определяют параметры АР, близкие к оптимальным, а затем при наладке САР методом организованного поиска находят оптимальные значения настроечных параметров.
Кроме приближенных результатов к недостаткам упрощенных методов относят ограничение представлений динамических свойств ОР узким классом ПФ типа (3.3) – (3.6). Другие упрощенные методы параметризации АР, названные ранее (см. п. 3.5), подобны рассмотренному. Сравнение этих методов между собой не обнаружило существенных различий. Результаты вычислений и экспериментов не сильно различаются, если последние проведены при одинаковых допущениях /32/.
|
||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 215; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.16.184 (0.012 с.) |