Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Метод синтеза многоконтурных САУ ⇐ ПредыдущаяСтр 4 из 4
К многоконтурным относят системы подчиненного регулирования. Такие системы составляют основу электропривода станков с ЧПУ. Система подчиненного регулирования представляет собой многоконтурную САУ с каскадным включением АР. Количество АР и контуров регулирования равно количеству регулируемых величин (координат) объекта. Например, для управления электроприводами с двигателями постоянного тока во многих случаях применяют двухконтурную САР угловой скорости с подчиненным контуром регулирования тока. В этой системе в качестве регулируемых величин принимают угловую скорость и ток якорной цепи двигателя. Выходной сигнал регулятора скорости, включенного во внешний контур, является задающим сигналом для внутреннего контура регулирования тока. Таким образом, регулирование тока подчинено регулированию скорости. Настройку многоконтурных систем с подчиненным регулированием координат производят, начиная с внутреннего контура. При этом настройка внутреннего контура (контура тока) не зависит от настройки внешних контуров (контура скорости).
В системах подчиненного регулирования применяют не только АР, реализующие типовые законы регулирования, но и стандартные настройки контуров регулирования. Различают настройку на технический (модульный) оптимум и настройку на симметричный оптимум (рисунок 3.35). Названные настройки основываются на следующих положениях. ОР контура тока имеет ПФ
Постоянную времени T mназывают некомпенсированной постоянной времени. Предполагают, что T я > T m. С помощью регулятора тока компенсируют большую постоянную времени электропривода T я. Поэтому принимают время изодрома ПИ-регулятора тока T РТ = T я. Следовательно, ПФ регулятора тока
ПФ разомкнутого контура тока
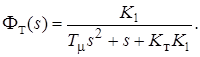
где Основная ПФ контура тока
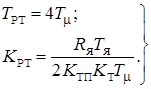
Условием настройки контура тока на технический оптимум являются следующие равенства
а на симметричный оптимум – равенства
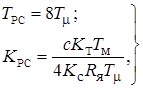
Контур скорости настраивают на симметричный оптимум, выбирая параметры регулятора скорости в соответствии с равенствами
где c – коэффициент электродвигателя; T м – электромеханическая постоянная времени электропривода, T м >> T m.
Контрольные вопросы
1 В чем состоит задача синтеза САУ? 2 Какую САУ считают оптимальной? 3 Какие требования предъявляют к процессу регулирования? 4 Каковы основные этапы синтеза САУ? 5 Что называют объектом управления? 6 Какие свойства объектов управления относят к типовым? 7 Что понимают под эквивалентным объектом регулирования? 8 Что понимают под законом регулирования (алгоритмом управления)? 9 Какие законы регулирования относят к типовым? 10 В чем заключаются отличия идеальных и реальных автоматических регуляторов? 11 Что понимают под критерием оптимальности САУ? 12 Каковы особенности типовых переходных процессов? 13 По каким признакам классифицируют методы синтеза САУ? 14 Какова сущность параметрической оптимизации САУ? 15 Какова сущность метода стандартных коэффициентов? 16 Какова сущность метода корневого годографа? 17 Что понимают под корректирующим устройством САУ? 18 Какова сущность метода расширенных частотных характеристик? 19 Какова сущность упрощенных методов параметрической оптимизации САУ? 20 Какие САУ относят к системам подчиненного регулирования? 21 Какова сущность настройки контура регулирования на "технический оптимум"? 22 Какова сущность настройки контура регулирования на "симметричный оптимум"?
ЗАКЛЮЧЕНИЕ
За рамками пособия остался вопрос эффективного решения типовых задач ТАУ. В учебной практике желаемый эффект рассматривают в быстром достижении результата за счет автоматизации самого процесса решения задачи с помощью компьютера. Современные математические системы Maple, MathCAD, Mathematica, MATLAB и другие имеют достаточные средства для анализа и синтеза САУ. Наибольшие удобства пользователю предоставляет MATLAB, обладающий разнообразными инструментами математического моделирования систем управления. Пользователю дана возможность выбора наилучшего из них. Все задачи, рассмотренные в пособии как примеры, решены в системе MATLAB. Результаты решения представлены на соответствующих рисунках в виде временнÏх и частотных характеристик. Пытливый студент должен воспользоваться названными примерами для развития собственных навыков решения типовых задач ТАУ.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А алгоритм управления 10, 143-145
Б Боде диаграмма 56
В величина - входная 22 - выходная 10 вид передаточной функции нормированный 150 воздействие - возмущающее 10 - задающее 10 - управляющее 10 - типовое (стандартное) 38-40 время регулирования 125
Г годограф - корневой 162 - Найквиста 107 - Михайлова 106 - частотный 49 граница устойчивости 102
Д Дирака функция 39 декада 53 декремент затухания 126 диполь 165 добротность САУ 138
Е емкость объекта регулирования Ж Жордана форма каноническая 91
З задача анализа 20 задача идентификации 20 задача синтеза 20 закон регулирования типовой 143-145 закон управления 10 запаздывание 142 запас устойчивости - по амплитуде 111-112 - по фазе 111 звено динамическое - типовое 22 - - дифференцирующее 27-28 - - интегрирующее (астатическое) 27-28 - - минимально-фазовое 27 - - неминимально-фазовое 27 - - позиционное (статическое) 27
И идентификация 20, 57 импульс единичный 39 инвариантность 113 - абсолютная 114 - полная 114 - частичная 115
К Калмана теорема - первая 122 - вторая 123 Карсона преобразование 41 качество процесса регулирования 124 кибернетика техническая 7 колебательность 126 компенсатор 113 коррекция динамических свойств - запаздывающая 168 - опережающая 168 Коши задача 63 Коши условия (начальные условия) 63 Коши форма нормальная 72 коэффициент демпфирования 28 коэффициент затухания 27, 63 коэффициенты передаточной функции стандартные 148 коэффициенты ошибок 137 критерии качества САУ - интегральные 131-136 - корневые 129-131 - частотные 127-128 критерии устойчивости - логарифмический 110 - Михайлова 106 - Найквиста 107 - Рауса-Гурвица 104 критерий (условие) наблюдаемости САУ 123 критерий (условие) управляемости САУ 123 критерий оптимальной настройки автоматического регулятора 146
Л Лапласа - оператор 23 - преобразование прямое и обратное 41, 65-72 линия равной степени затухания 170
М матрица - выхода 80 - коэффициентов 79 - наблюдаемости 123 - обхода 80 - управления 79 - управляемости 122 - Фробениуса 83 метод доминирующих полюсов 164 метод классический решения задачи Коши 63 метод корневого годографа (МКГ) 161 метод математического моделирования 9 метод наименьших квадратов (МНК) 57 метод операционный решения задачи Коши 65 метод переходных характеристик (функций) 57
метод пространства состояния (МПС) 77 метод расширенных частотных характеристик (РЧХ) 169 метод свертки 31 метод стандартных коэффициентов 149 методы численные решения задачи Коши 72 механизм исполнительный (ИМ) 19 модель математическая 20 - понятие 9 модель регрессионная 57
Н наблюдаемость 122 нуль передаточной функции 26
О область устойчивости САУ 112 обратная связь (ОС) - главная 12 - положительная 31 - отрицательная 31 объект регулирования (ОР)19, 140 - - астатический (неустойчивый) 142 - - двухемкостной 141 - - одноемкостной 141 - - статический (устойчивый) 142 - - эквивалентный 142 объект управления (ОУ) 10, 140 октава 54 оператор дифференцирования 23 оператор Лапласа 23 оптимизация параметрическая 149 оптимум симметричный 178 оптимум технический (модульный) 178 орган регулирующий (РО) 19 оценка качества САУ 125 - косвенная 125 - прямая 125 оценки качества интегральные - линейные 131 - квадратичные 133 ошибка регулирования 11 - - статическая 36-37
П параметры настройки 143 перерегулирование 125 переменные состояния 77-78 - ненаблюдаемые 122 - неуправляемые 122 показатели качества САУ 124 переходный процесс - апериодический 127 - колебательный 127 - монотонный 127 - типовой(стандартный) 146-148 показатель колебательности 128 полином характеристический разомкнутой САУ 34 полоса пропускания 128 полюсы - доминирующие 164 - дополнительные 165 - передаточной функции 25, 101, 129 порядок астатизма 35 правило переходов (критерий Найквиста) 109 признаки классификационные САУ 19-20 принцип автоматического управления - комбинированный 12 - по возмущению (компенсации возмущения) 12 - по отклонению (по ошибке) 11 проблема минимальной реализации 97
Р рассогласование (ошибка регулирования) 11 регулирование автоматическое 7 регулятор автоматический 19 решение задачи Коши - приближенное 76 - точное 76
С самовыравнивание (саморегулирование) 142 свойства корневого годографа 163-164 свойства объекта управления 140 связь обратная единичная 33 синтез САУ (понятие) 20 система автоматического регулирования (САР) - астатическая 16 - - первого порядка 35 - - второго порядка 35 - статическая 16, 35 - структурно-неустойчивая 113 система автоматического управления (САУ) - замкнутая 11 - многоконтурная 177 - наблюдаемая 123 - одноконтурная 12 - оптимальная 131, 146-147 - разомкнутая 12 - следящая 33 - температуры 13
- угловой скорости 17, 178 - - - с единичной обратной связью 33 - управляемая 122 система подчиненного регулирования 177 система уравнений - дуальная (двойственная) 93 соединения звеньев - встречно-параллельное 30 - параллельное 30 - последовательное 30 составляющие переходного процесса 100 - вынужденная 100 - переходная (свободная) 100 статизм 17 степень затухания 126, 169 степень колебательности 130 степень устойчивости 129 схема структурная алгоритмическая - - - типовой одноконтурной САУ 31 - - - эквивалентная типовой одноконтурной САУ 31 схема функциональная (блок-схема) 18
Т Тейлора ряд 25 теорема разложения 66 теорема свертывания 66 теория автоматического регулирования (ТАР) 7 теория автоматического управления (ТАУ) 7 теория информационных устройств 7 точка критическая 108 точность статической САУ 37
У управление автоматическое 7, 10 - объектом 7, 10 управляемость САУ 122 устойчивость САУ 99 устройство - задающее (ЗУ) 19 - измерительное (ИУ) 19 - корректирующее (КУ) 164 - суммирующее (СУ) 19 - управления (УУ) 10 - усилительное (УУ) 19 уравнение - алгебраическое звена - в отклонениях или вариациях 25 - - динамического звена 22 - - САУ неоднородное 24 - символическое (операторное) 23 - - нормированное звена 23 - - однородное САУ 24 - выхода 79 - дифференциальное 23 - состояния80 уравнение характеристическое - - замкнутой САУ 24 - - разомкнутой САУ 34 уравнения чувствительности 119 условие затухания переходного процесса 102 условие инвариантности 116-117 условие устойчивости 103
Ф форма Вышнеградского 150 форма уравнений состояния каноническая - вторая наблюдаемая 90 - вторая управляемая (УКП) 84 - дуальная фазовой переменной 84 - Жордана 91 - нормальная (УКП) 85 - первая наблюдаемая 88 - первая управляемая (НКП) 82 форма уравнения - Коши 72 - первая стандартная операторная 24 - вторая стандартная 26 - третья стандартная 81 формула замыкания 31 формула Парсеваля 133 формула Рэлея 133 Фробениуса матрица 83 функция единичная импульсная 39 функция единичная ступенчатая 39 функция передаточная - динамического звена 26 - основная одноконтурной САУ 32 - по возмущению замкнутой САУ 35 - разомкнутой САУ 34 - стандартная разомкнутой САУ 34 - частотная 47 - эквивалентная группы звеньев 30, 31 функция чувствительности 118 Фурье ряд 40
Х Хевисайда - формула 70 - функция 39 характеристика - амплитудно-частотная (АЧХ) 46 - амплитудно-фазовая частотная (АФЧХ) 49 - асимптотическая частотная 53 - весовая 41 - вещественная (действительная) частотная 46 - динамическая ОР 139 - импульсная 41 - логарифмическая частотная (ЛЧХ) - - амплитудная (ЛАЧХ) 49 - - фазовая (ЛФЧХ) 49 - мнимая частотная 48 - переходная 40 - разгона ОР 141 - расширенная частотная 169 - статическая ОР 141 - фазовочастотная (ФЧХ) 46
Ч чувствительность САУ 118 частота среза 128 частота резонансная 128
СПИСОК ЛИТЕРАТУРЫ
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования.– 4-е изд., перераб. и доп.– М.: Наука, 2003.– 768с.
2. Макаров И.М., Менский Б.М. Линейные автоматические системы. Элементы теории, методы расчета и справочный материал.– 2-е изд., перераб. и доп.– М.: Машиностроение, 1982.– 504 с. 3. Теория автоматического управления. В 2-х ч. Ч.1: Теория линейных систем автоматического управления/ Н.А.Бабаков, А.А.Воронов, А.А.Воронова и др.; Под ред. А.А.Воронова.– 2-е изд., перераб. и доп.– М.: Высш. шк., 1986.– 367 с. 4. Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления с примерами на языке MATLAB.– СПб.: Наука, 1999.– 467 с. 5. Крутько П.Д. Алгоритмы и программы проектирования автоматических систем / П.Д.Крутько, А.И.Максимов, Л.М.Скворцов.– М.: Радио и связь, 1988.– 306 с. 6. Квакернаак Х., Сиван Р. Линейные оптимальные системы управления.– М.: Мир, 1977.– 650 с. 7. Егоров К.В. Основы теории автоматического регулирования.– 2-е изд., перераб. и доп.– М.: Энергия, 1967.– 648 с. 8. Ерофеев А.А. Теория автоматического управления.– 2-е изд., перераб. и доп.– СПб.: Политехника, 2001.– 302 с. 9. Красовский А.А., Поспелов Г.С. Основы автоматики и технической кибернетики.– М.: ГЭИ, 1962.– 600 c. 10. Дубровный В.А. Справочник по наладке автоматических устройств контроля и регулирования / В.А.Дубровный, Е.И.Забокрицкий, В.Г.Трегуб и др.– 2-е изд., перераб. и доп. В 2-х частях.– Киев: Наукова думка, 1981. 11. Техника проектирования систем автоматизации: Справочные материалы/ Под ред. Л.И.Шипетина.– М.: Машиностроение, 1966.– 602 с. 12. Дорф Р., Бишоп Р. Современные системы управления.– М.: Лаборатория базовых знаний, 2002.– 832 с. 13. Зайцев Г.Ф. Основы автоматического управления и регулирования / Г.Ф.Зайцев, В.И.Костюк, П.И.Чинаев.– 2-е изд., перераб. и доп.– Киев: Технiка, 1977.– 472 с. 14. Куропаткин П.В. Теория автоматического управления.– М.: Высш. шк., 1973.– 528 с. 15. Методы классической и современной теории автоматического управления: Учеб. в 3-х т. Т.2: Синтез регуляторов и теория оптимизации систем автоматического управления/ Под ред. М.Д.Егупова.– М.: Изд-во МГТУ им. Н.Э.Баумана, 2000.– 736 с. 16. Первозванский А.А. Курс теории автоматического управления.– М.: Наука, 1986.– 616 с. 17. Стрейц В. Основы теории автоматического регулирования / В.Стрейц, М.Шаламон, З.Котек, М.Балда.– М.: Госоптехиздат, 1960.– 333 с. 18. Горовиц А.М. Синтез систем с обратной связью.– М.: Сов. Радио, 1970.– 600 с. 19. Мееров М.В. Основы автоматического управления / М.В.Мееров, Ю.Н.Михайлов, В.Г.Фридман.– М.: Недра, 1972.– 752 с. 20. Удерман Э.Г. Метод корневого годографа в теории автоматических систем.– М.: Наука, 1972.– 448 с. 21. Ротач В.Я. Теория автоматического управления теплоэнергетическими процессами.– М.: Энергоатомиздат, 1985.– 296 с. 22. Стефани Е.П. Основы расчета настройки регуляторов теплоэнергетических процессов.– 2-е изд., перераб. и доп.– М.: Энергия, 1972.– 376 с. 23. Штейнберг Ш.Е. Промышленные автоматические регуляторы / Ш.Е.Штейнберг, Л.О.Хвилевицкий, М.А.Ястребенецкий.– М.: Энергия, 1973.– 568 с. 24. Оппельт В. Основы техники автоматического регулирования.– М.: ГЭИ, 1960.– 606 с. 25. Винцент Дель Торо, Сидней Р. Паркер. Принципы проектирования систем автоматического управления.– М.: Машгиз, 1963.– 559 с. 26. Кулаков Г.Т. Инженерные экспресс-методы расчета промышленных систем регулирования: Спр. пособие.– Минск: Высш. шк., 1984.– 192 с. 27. Такер Г.К., Уиллс Д.М. Упрощенные методы анализа систем автоматического регулирования.– М.: ГЭИ, 1963.– 368 с. 28. Траксел Джон. Синтез систем автоматического регулирования.– М.: Машгиз, 1959.– 614 с. 29. Филлипс Ч., Харбор Р. Систем управления с обратной связью.– М.: Лаборатория базовых знаний, 2001.– 616 с. 30. Смит Отто Дж. М. Автоматическое регулирование.– М.: Физматгиз, 1962.– 848 с. 31. Справочная книга по технике автоматического регулирования/ Под ред. Дж. Траксела.– М.: ГЭИ, 1962.– 784 с. 32. Александров А.Г. Справочник по теории автоматического управления / А.Г.Александров, В.М.Артемьев, В.Н.Афанасьев и др.– М.: Наука, 1987.– 712 с. 33. Андреев Ю.Н. Управление конечномерными линейными объектами.– М.: Наука, 1976.– 424 с. 34. Анхимюк В.Л. Теория автоматического управления.– 3-е изд., перераб. и доп.– Минск: Вышэйшая школа, 1979.– 350 с. 35. Афанасьев В.Н. Математическая теория конструирования систем управления / В.Н.Афанасьев, В.Б.Колмановский В.Б., В.Р.Носов и др.– 3-е изд., попр. и доп.– М.: Высш. шк., 2003.– 614 с. 36. Воронов А.А. Устойчивость, управляемость, наблюдаемость.– М.: Наука, 1979.– 336 с. 37. Герасимов С.Г. Теоретические основы автоматического регулирования тепловых процессов. Ч. 1: Общие положения и понятия.– М.: Высш. шк., 1967.– 206 с. 38. Громыко В.Д. Справочное пособие по теории систем автоматического регулирования и управления / В.Д.Громыко, В.В.Зубарь, В.В.Кругликов и др. / Под ред. Е.А.Санковского.– Минск: Вышэйшая шк., 1973.– 584 с. 39. Заде Л., Дезоер Ч. Теория линейных систем: метод пространства состояний.– М.: Наука, 1970.– 704 с. 40. Иванов В.А. Математические основы теории автоматического регулирования / В.А.Иванов, Б.К.Чемоданов, В.С.Медведев.– М.: Высш. шк., 1971.– 808 с. 41. Иващенко Н.Н. Автоматическое регулирование.– 4-е изд., перераб. и доп.– М.: Машиностроение, 1978.– 736 с. 42. Корнилов Ю.Г. Теоретические основы автоматического регулирования. - Киев: Техника, 1965.– 397 с. 43. Литвинов А.П. Основы автоматики / А.П.Литвинов, С.П.Моржаков, Е.А.Фабрикант.– М.: Машиностроение, 1967.– 272 с. 44. Методы классической и современной теории автоматического управления: Учеб. в 3-х т. Т.1: Анализ и статистическая динамика систем автоматического управления/ Под ред. М.Д.Егупова.– М.: Изд-во МГТУ им. Н.Э.Баумана, 2000.– 748 с. 45. Михайлов В.С. Теория управления.– Киев.: Выща шк., 1988.– 312 с. 46. Пантелев А.В., Бортаковский А.С. Теория управления в примерах и задачах.– М.: Высш. шк., 2003.– 583 с. 47. Попов Е.П. Автоматическое регулирование. Основные понятия.– 3-е изд., стереотип.– М.: Гос-ое изд-во физ.-мат. лит-ра, 1959.– 296 с. 48. Попов Е.П. Теория линейных систем автоматического регулирования и управления.– М.: Наука, 1978.– 256 с. 49. Пугачев В.С. Основы автоматического управления / В.С.Пугачев, И.Е.Казаков, Д.И.Гладков и др.– 3-е изд., перераб. и доп.– М.: Наука, 1974.– 720 с. 50. Ротач В.Я. Расчет настройки промышленных систем регулирования.– М.: Госэнергоиздат, 1961.– 344 с. 51. Санковский Е.А. Теория автоматического управления / Е.А.Санковский, А.С.Шаталов, С.А.Шматок и др.– М.: Высш. шк., 1977.– 448 с. 52. Солодовников В.В. Основы теории и элементы систем автоматического регулирования / В.В.Солодовников, В.Н.Плотников, А.В.Яковлев.– М.: Машиностроение, 1985.– 536 с. 53. Сю Д., Мейер А. Современная теория автоматического управления и ее применение.– М.: Машиностроение, 1972.– 552 с. 54. Теория автоматического регулирования: В 3 т./ Под ред. В.В.Солодовникова. Кн. 1: Математическое описание, анализ устойчивости и качества систем автоматического регулирования / М.А.Айзерман и др.– М.: Машиностроение, 1967.– 770 с. 55. Теория автоматического регулирования: В 3 т./ Под ред. В.В.Солодовникова. Кн. 2: Анализ и синтез линейных непрерывных и дискретных систем автоматического регулирования/ А.Н.Дмитриев и др.– М.: Машиностроение, 1967.– 682 с. 56. Теория автоматического управления: Учеб. в 2-х частях/ Под ред. проф. А.В.Нетушила. Ч. 1/ Л.С.Гольдфарб и др.– М.: Высш. шк., 1967.– 424 с. 57. Топчев Ю.И. Атлас для проектирования систем автоматического регулирования.– М.: Машиностроение, 1989.– 752 с. 58. Ту Ю. Современная теория управления.– М.: Машиностроения, 1971.– 472 с. 59. Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления.– М.: Наука, 1971.– 744 с. 60. Юревич Е.И. Теория автоматического управления.– 2-е изд., перераб. и доп.– СПб.: Энергия, 1975.– 416 с.
Нестеров Александр Владимирович Нестеров Сергей Владимирович
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 292; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.113.188 (0.191 с.) |
 Типовая структурная схема САР угловой скорости электропривода постоянного тока изображена на рисунке 3.34. Внутренний контур тока образован регулятором тока, ОР (тиристорный преобразователь и якорная цепь двигателя) и датчиком тока, с помощью которого формируется отрицательная ОС по току с ПФ W т(s) = K т. Параметры регулятора тока определяют, как правило, без учета внутренней ОС по ЭДС двигателя. Внешний контур скорости образован регулятором скорости, ОР, в качестве которого выступают замкнутый контур тока и механическая часть электропривода, а также датчиком скорости, с помощью которого формируется отрицательная ОС по скорости с ПФ W с(s) = K с.
Типовая структурная схема САР угловой скорости электропривода постоянного тока изображена на рисунке 3.34. Внутренний контур тока образован регулятором тока, ОР (тиристорный преобразователь и якорная цепь двигателя) и датчиком тока, с помощью которого формируется отрицательная ОС по току с ПФ W т(s) = K т. Параметры регулятора тока определяют, как правило, без учета внутренней ОС по ЭДС двигателя. Внешний контур скорости образован регулятором скорости, ОР, в качестве которого выступают замкнутый контур тока и механическая часть электропривода, а также датчиком скорости, с помощью которого формируется отрицательная ОС по скорости с ПФ W с(s) = K с.
 где T mи T я = L я/ R я – постоянные времени соответственно тиристорного преобразователя и якорной цепи электродвигателя.
где T mи T я = L я/ R я – постоянные времени соответственно тиристорного преобразователя и якорной цепи электродвигателя.

 .
.