
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработанных после 1987 г. (по ГОСТ 26772 – 85 )Содержание книги
Поиск на нашем сайте
Примечания. 1. В обозначениях раздельных обмоток двигателей, переключаемых на разное число полюсов, меньшая (большая) цифра стоящая перед буквенным обозначением обмотки, соответствут меньшей (большей) частоте вращения. 2. Двойные обозначения (например, 1U – 2 N; 1U – 3 N и др.) применяют для выводов, которые при одной частоте вращения присоединяют к сети, а при другой частоте вращения замыкают накоротко между собой. Если на доске выводов нет достаточно места для двойного обозначения с обязательным приложением к машине схемы соединений. 3. В чертежах электрических схем соединения с шестью выводными концами на свободном поле схемы при соединении фаз в треугольник допускается применение двойных обозначений (U1W2; V1U2; W1V2), при соединении фаз в звезду – обозначение начал фаз U1, V1, W1 и тройного обозначения (U2; V2; W2) точки звезды. Выбор схемы полюсно-переключаемых обмоток зависит от того, должен двигатель работать на разных частотах вращения с постоянным моментом или с постоянной мощностью [6].
Рис. 3.37. Схемы включения обмоток многоскоростного асинхронного двигателя на 2р = 4/8 при работе с постоянной мощностью: а – схема соединений катушечных групп обмотки; б – включения обмотки на 2р = 4 при а = 1; в – включение обмотки на 2р = 8 при а =2.
На рис. 3.37 показаны условные схемы включения двухскоростного асинхронного двигателя на 2р= 4/8, рассчитанного на работу с одной и той же мощностью при 2р = 4 и 2р= 8. На высшей частоте вращения (2р = 4) его обмотку соединяют в треугольник при а = 1, а на низшей (2р= 8) — в звезду при а = 2. При том и при другом числе полюсов катушки обмотки остаются теми же самыми, поэтому их выполняют с шагом, равным или несколько большим полюсного деления при большем числе полюсов. Существуют схемы обмоток двухскоростных двигателей, позволяющие путем переключения катушечных групп изменять числа полюсов и в отношении, отличном от 1: 2, с сохранением достаточно высокого обмоточного коэффициента для обеих частот вращения и числа выводных концов обмоток — не более шести. Особенность этих схем заключается в специфической компоновке катушечных групп из разновитковых катушек,
характерный для данного метода, иллюстрируется схемой, приведенной на рис. 3.38. Двухскоростные асинхронные двигатели серии 4А и АИ с высотами осей вращения 160…200 мм при соотношении чисел полюсов 6: 4 имеют две обмотки: основную – двухслойную и дополнительную – однослойную, катушечные группы которых условно показаны на рис. 3.39, а соответственно кружками и прямоугольниками. Основная обмотка — полюсно – переключаемая. При работе на 2р=4 включается только основная обмотка, соединенная треугольником при а = 1 (рис. 3.39, б ). При работе двигателя на 2р = 6основная обмотка соединяется в звезду с двумя параллельными ветвями и последовательно с ней включается дополнительная обмотка (рис. 3.39, в). Для трехскоростных и четырехскоростных асинхронных двигателей используют оба принципа изменения чисел полюсов: устанавливают две независимые обмотки, каждая из которых (в четырехскоростных) или одна из них (в трехскоростных двигателях) выполняется полюсно-переключаемой.
Рис. 3.39 Полюсно – переключаемые обмотки:
- элементы основной обмотки, - элементы дополнительной обмотки В обмотках в большинстве случаев используют более простые схемы переключения числа полюсов в отношении 1: 2. Так, например, трехскоростные двигатели 4А112М6/4/2 имеют две независимые обмотки, одна из которых рассчитана на 6 полюсов, а вторая (полюсно-переключаемая) — на 2 и 4 полюса; в четырехскоростных двигателях 4А180М12/8/6/4 обе обмотки полюсно – переключаемые: одна на 12 и 6 полюсов, другая на 8 и 4 полюса.
ОБМОТКИ ФАЗНЫХ РОТОРОВ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
По своей конструкции и схемам соединения обмотки фазных роторов машин переменного тока. В роторах машин мощностью до 80...100 кВт обычно применяют катушечные обмотки. Конструктивно катушечные обмотки фазных роторов отличаются от статорных только расположением лобовых частей и наличием на них бандажей. В схемах отличие состоит в выборе начал фаз обмотки. Если расстояние между началами фаз обмотки статора выбирается минимально возможным для обеспечения большей компактности расположения выводных концов, то в обмотке ротора их стремятся расположить равномерно по окружности, чтобы облегчить балансировку обмотанного ротора. С увеличением размеров машины уменьшается число витков в обмотке статора. Соответственно должно уменьшиться и число витков обмотки ротора, так как иначе напряжение на контактных кольцах возрастает, что может послужить причиной пробоя изоляции во время пуска машины. Поэтому в машинах больших габаритов обмотку ротора выполняют стержневой, имеющей всегда два эффективных проводника в пазу. Число витков в обмотке ротора при этом уменьшается, а ток ротора возрастает. Поэтому обмотку выполняют из прямоугольной меди или медных шин с площадью поперечного сечения, много большей, чем сечение проводников обмотки статора. Стержневую обмотку ротора, как правило, делают волновой, так как в волновой обмотке меньше межгрупповых соединений, которые технологически трудновыполнимы при большом сечении проводников. Основные закономерности соединений схем волновых обмоток фазных роторов рассмотрим на следующем примере. Составим схему стержневой волновой обмотки ротора, имеющего число пазов Z2 = 24 и число полюсов 2р2= 4. На рис. 3.40, а показаны 24 линии пазов, в которых расположены проводники верхнего слоя обмотки. Разметим эти пазы по фазам, предварительно определив полюсное деление τ2 = Z2 / 2 p 2 = 24/ 4 = 6 пазовым делениям и число пазов на полюс и фазу q 2 = Z2/ (2 p 2m2) = 24/ (4 ∙ 3) = 2.
Рис. 3.40. К построению схемы стержневой волновой обмотки фазного ротора асинхронного двигателя, Z = 24, 2р = 4: а – схема соединений одной фазы; б – последовательность соединения стержней
Стрелками на линиях укажем для первой фазы направления мгновенных значений токов в стержнях (одинаковые в пределах каждого полюсного деления и изменяющиеся на обратные при переходе на соседние полюсные деления) и начнем построение схемы обмотки, приняв за начало первой фазы (К1)верхний стержень, лежащий в первом пазу. Обмотку выполняют с диаметральным шагом. В данной схеме шаг обмотки по пазам у= τ2 = 6 зубцовых делений. Обмотка двухслойная, поэтому верхний стержень из паза 1 должен быть соединен с нижним стержнем паза 1 + у= 1 + 6 = 7. Далее нижний стержень паза 7 соединяется с верхним стержнем паза 7 + у = 7 + 6= 13 и т. д. Одновременно с вычерчиванием схемы целесообразно записывать последовательность шагов обмотки (рис. 3.40, б). Проделав таким образом 2р2 — 1 = 4 — 1 = 3 шага, убеждаемся, что при следующем — четвертом (по числу полюсов) шаге обмотка замкнется сама на себя, так как 2 р 2τ2 = Z2. При построении схемы этот шаг укорачивают или удлиняют на одно зубцовое деление, т. е. делают его равным у - 1 или у + 1. Чаще встречаются схемы с укороченными переходными шагами, так как они приводят к некоторой экономии меди обмотки. При удлиненном шаге возникают дополнительные перекрещивания лобовых частей верхнего и нижнего слоев у выхода стержней из паза. Укороченным (или удлиненным) шагом завершается первый обход обмотки по окружности ротора. После q 2таких обходов (в рассматриваемом примере — после двух обходов) изменение последнего шага производить нельзя, так как это приведет обмотку данной фазы к стрежням соседней. Для соединения оставшихся после первых q 2 обходов стержней фазы последний стержень, на котором занимающим такое же положение в пазу на расстоянии шага от него в направлении обхода, т. е. нижний стержень паза 18соединяют с нижним стержнем паза 18 + 6 =24. Далее продолжают обход в том же порядке, но изменив его направление. Построение обмотки заканчивается после q 2 обходов в обратном направлении. Начала других фаз обмотки располагают симметрично через 2 р 2 q 2пазовых делений, т. е. через 1/3 окружности ротора (см. § 3.5). Полная схема обмотки, построение которой начато в примере на рис. 3.40, приведена на рис. 3.41. За начала фаз приняты верхние стержни, расположенные в пазах 1, 9 и 17.Рассмотренная обмотка является типичной для стержневых волновых обмоток фазных роторов асинхронных двигателей. Отметим некоторые особенности обмоток данного типа. В стержневой волновой обмотке имеется только по одной перемычке на фазу независимо от числа полюсов, в то время как в катушечных двухслойных обмотках таких перемычек — межгрупповых соединений — необходимо установить 2 p - 1 на каждую фазу. Это обстоятельство существенно облегчает соединение схемы, особенно в многополюсных машинах. При симметричном расположении начал фаз также симметрично располагают перемычки и концы фаз. Если за начала фаз приняты верхние стержни пазов, то концами фаз также будут верхние стержни, а перемычки соединяют с нижними стержнями.
Рис. 3.41. Схема стержневой волновой обмотки фазного ротора, Z = 24, 2 p = 4, a = 1
Находят применение также некоторые модификации рассмотренных схем обмоток роторов. Иногда в схемах выполняют укороченные переходные шаги по обходу ротора в одну сторону и удлиненные — в другую. В таких схемах перемычки смещаются на несколько пазовых делений, поэтому конструктивно выводные концы фаз не пересекаются с перемычками, что облегчает крепление лобовых частей. Распространены также схемы обмоток фазных роторов, выполняемых без перемычек. В таких обмотках в каждой из фаз на месте последнего при прямом обходе стержня, который в обычных схемах соединяют с перемычкой (см., например, на рис. 3.41 нижние стержни в пазах 2, 10, 18),устанавливают изогнутый переходной стержень. На схеме одной фазы обмотки без перемычек (рис. 3.42) переходной стержень размещен в 26-м пазу (отмечен кружком на схеме). Переходной стержень изгибается так, что одна половина его по длине находится в нижнем слое паза, а другая — в верхнем. Обе лобовые части стержня отгибают в одну и ту же сторону. После установки переходного стержня направление обхода меняется на обратное так же, как после установки перемычек в рассмотренных ранее схемах. В такой обмотке концы фаз располагают на противоположной от начал фаз стороне ротора. Отсутствие перемычек упрощает конструкцию обмоток и технологию соединения схемы. Расположение начал и концов фаз на разных торцах ротора облегчает установку выводных концов и соединительной шины на конечных выводах обмотки для соединения ее в звезду.
Рис. 3.42. Схема (а) и последовательность соединения (б) одной фазы стержневой волновой обмотки фазного ротора с переходным стержнем, Z = 36, 2 p = 4 В то же время наличие переходных, изогнутых по длине стержней требует их дополнительного крепления в пазах (рис. 3.43). Волновую стержневую обмотку выполняют с одной и, реже, с двумя параллельными ветвями. Образование большего числа параллельных ветвей технологически сложно. Для получения двух параллельных ветвей перемычку между половинами фаз убирают и каждую часть обмотки соединяют с начальным и конечным выводами фаз сохраняя в них направление тока.
Рис. 3.44. Схема и последовательность соединения одной фазы стержневой волновой обмотки фазного ротора, Z = 30, 2 p = 4, q =
большими, равными у ' = τ2 + ε1 пазовых делений, и малыми, равными у'' = τ2 – ε2 пазовых делений, где ε1 и ε2 — наименьшие дробные числа, при которых y ' и у"выражаются целыми числами. Количество больших и малых шагов, а также последовательность соединений стержней в схеме зависят от числа q 2 и находятся аналогично числу и чередованию больших и малых катушечных групп в двухслойных катушечных обмотках с дробным q. Наиболее часто дробные обмотки фазных роторов выполняют при знаменателях дробности d = 2, т. е. с q 2 = На примере схемы обмотки с q 2 =
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 442; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.01 с.) |


 Рис. 3.38. Принципиальная схема двухскоростной обмотки, выпол-ненной по принципу ПАМ:
1 – 9 - элементы обмотки
Рис. 3.38. Принципиальная схема двухскоростной обмотки, выпол-ненной по принципу ПАМ:
1 – 9 - элементы обмотки


 а – выводы обмотки; б – включение основной обмотки на 2р = 4 при а = 1; в – включение основной и дополнительной обмоток на 2р = 6 при а = 2;
а – выводы обмотки; б – включение основной обмотки на 2р = 4 при а = 1; в – включение основной и дополнительной обмоток на 2р = 6 при а = 2;

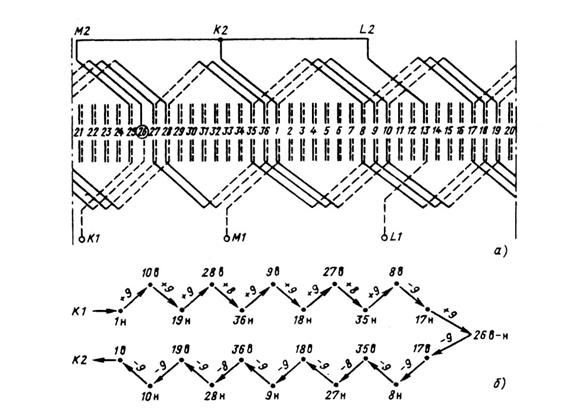
 Рис. 3.43. Положение переходного стержня в пазу ротора:
1 – переходный стержень; 2 – уплотняющие клинья;
3 – сердечник ротора
Рис. 3.43. Положение переходного стержня в пазу ротора:
1 – переходный стержень; 2 – уплотняющие клинья;
3 – сердечник ротора


 и т. п. В таких обмотках большие шаги равны у' = τ2 + 1/2, а малые у" = τ2 - 1/2 пазовых делений. Схему обмотки строят так же, как и при целом q 2, но большие шаги чередуют с малыми. Последовательность чередования шагов до перемычки и после изменяется на обратную.
и т. п. В таких обмотках большие шаги равны у' = τ2 + 1/2, а малые у" = τ2 - 1/2 пазовых делений. Схему обмотки строят так же, как и при целом q 2, но большие шаги чередуют с малыми. Последовательность чередования шагов до перемычки и после изменяется на обратную.


