Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вибропреобразователи и регистрирующая аппаратураСодержание книги
Поиск на нашем сайте Жесткие требования к виброизмерительным приборам, касающиеся их чувствительности, точности, малой инерционности и массы, скорости измерений и возможности вести наблюдении законструкцией до разрушения, способствовали широкому применению при динамических испытаниях первичных вибропреобразователей. Вибропреобразователь - входное звено электрической цепи дистанционно работающего прибора. Он преобразует измеряемую величину и другую, эквивалентную ей, которую регистрируют вторичным прибором, расположенным на некотором расстоянии от испытываемой конструкции. Механическую величину, воспринимаемую преобразователем, называют входной (входной сигнал), а преобразованную - выходной (выходной сигнал). Между этими величинами существует линейная или нелинейная функциональная связь. Желательно, чтобы характеристики первичного прибора были линейными. Первичные вибропреобразователи подразделяются на пассивные, вырабатывающие при измерениях электродвижущую силу, и активные, изменяющие при работе какой-либо электрический параметр, например индуктивность, емкость или сопротивление. Из числа пассивных наибольшее применение нашли индукционные вибропреобразователи, гораздо реже встречаются пьезоэлектрические. Индукционный вибропреобразователь состоит из корпуса, инерционной массы и индукционного элемента, который содержит постоянный магнит и электрическую катушку. Принципиальная схема индукционного преобразователя с осевой подвеской инерционной массы показана на рис. 9.3, а.Для повышения чувствительности прибора к вращательной составляющей колебаний осевую подвеску инерционной массы заменяют маятниковой (рис. 9.3, б). Пьезоэлектрический вибропреобразователь (рис 9.4) состоит из инерционной массы, пьезоэлемента и металлических обкладок. Работа вибропреобразователя основана на свойстве некоторых веществ (кварц, пьезокерамика) электрически поляризоваться пропорционально приращению механической силы. С их помощью можно измерить параметры быстроизменяющихся динамических процессов: давления, перемещения, скорости и ускорения. В числе активных вибропреобразователей имеются индуктивные, емкостные и резистивные. Индуктивный вибропреобразователь состоит из одной или нескольких катушек индуктивности и ферромагнитного сердечника — магнитопровода. За счет изменения зазора
а б
Рис.9.3. Индукционные вибропреобразователи с подвеской инерционной массы: а- осевой; б – маятниковый; 1- корпус; 2- магнитный сердечник; 3- электрическая катушка; 4 – маятниковый рычаг
Рис.9.4. Схема пьезоэлектрического вибропреобразователя: 1 – корпус; 2- инерционная масса; 3 – пьезоэлемент; 4- металлические обкладки
По изменению тока судят о параметрах колебаний. Вибропреобразователи с переменным воздушным зазором имеют высокую чувствительность, при малых перемещениях от 0,1 до 1 мм. При подвижном сердечнике можно измерять перемещения до 60 мм. Для уменьшения помех и повышения точности измерений применяют дифференциальные индуктивные виброобразователи (рис. 9.5, в)с двумя магнитными системами, включенными в противоположные плечи измерительной схемы Емкостные виброобразователи состоят из металлических пластин-электродов, разделенных диэлектриком, и позволяют с большой точностью измерять линейные и угловые перемещения. Емкость конденсатора зависит от зазора Емкостные вибропреобразователи обладают высокой чувствительностью, однако требуют защиты от посторонних электрических полей, реагируют на изменение температуры и влажности, поэтому для динамических испытаний строительных конструкций применяются редко. Для измерения перемещений и деформаций наиболее широко применяются резистивные вибропреобразователи. Резистивный вибропреобразователь, или тензорезистор, закрепленный на конструкции, при ее загружении изменяет электрическое сопротивление в зависимости от деформации.
Рис.9.5. Индуктивные вибропреобразователи: а – с переменным воздушным зазором; б - с подвижным сердечником; в - дифференциального типа; 1- якорь; 2- сердечник; 3- обмотка Тензорезисторы применяются как при статических, так и при динамических испытаниях конструкций. При динамических испытаниях тензорезистор является первичным прибором, сигнал которого подается на тензоусилитель и записывается вторичным прибором — осциллографом. К динамическим характеристикам тензорезисторов относятся: собственная частота, динамическая чувствительность и динамический диапазон измерений. Собственная частота наклеенного тензорезистора составляет 100 - 300 кГц. Динамическая чувствительность тензорезпсторов зависит от их базы и длины продольной волны Для измерения ускорений и других параметров вибраций применяют также тензорезистивные вибропреобразователи, состоящие из упругих металлических элементов с наклеенными в зоне наибольших деформаций тензорезисторами.
Рис. 9.6. Схемы ёмкостных вибропреобразователей
Рис.9.7. К определению базы и способов повышения динамической стойкости тензорезисторов
Вторичные приборы для динамических испытаний комплектуются: усилителями, осциллографами, быстродействующими самопишущими приборами, магнитографами, эпюрографами и вспомогательными приборами. Вибропреобразователи, имеющие на выходе сигнал достаточной величины и нечувствительные к изменениям температуры, подключаются к вторичному прибору непосредственно. Если мощность выходного сигнала недостаточна, применяют усилители.
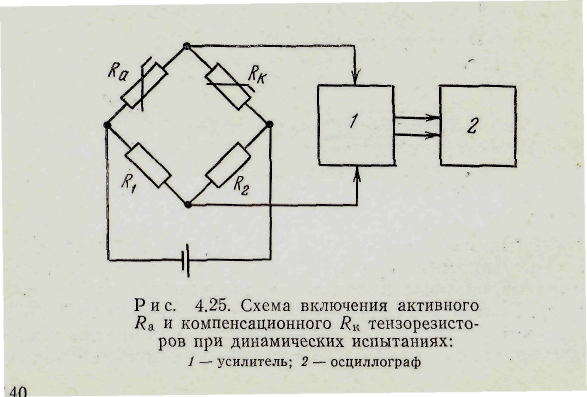
Рис. 9.8. Схема включения активного
1 – усилитель; 2 - осциллограф
Тензометрические усилители предназначены для усиления сигналов от тензорезисторов, включенных в полумостовую или мостовую схему (рис. 9.8). Наиболее распространенными являются усилители 8АНЧ-7М, ТА-5 и универсальная тензометрическая станция с внутренней градуировкой УТС-1-ВТ-12. Несущая частота усилителя 8АНЧ-7М -3,5 кГц, ТА-5 - 7,5 кГц, УТС-1-ВТ-12 - 35 кГц. Частота измеряемого процесса должна быть в 5- 7 раз ниже и находиться в пределах 0-7000 Гц. Каждый из усилителей состоит из автономного или встроенного блока питания, нескольких однотипных блоков, генератора несущей частоты, указателя выходного тока, тумблеров, ручек и шлицев включения, настройки, градуировки и балансировки моста. Выходы усилителей рассчитаны на подключение гальванометров светолучевых осциллографов. Принцип работы усилителей заключается в том, что рабочий тензорезистор, наклеенный на конструкцию, подключается к прибору и предварительно балансируется при ненагруженном состоянии конструкции. Стрелка гальванометра устанавливается на ноль. При нагружении конструкции вследствие деформации тензорезистор изменяет свое сопротивление, происходит разбаланс моста и появляется напряжение несущей частоты, которое усиливается и подается на фазочувствительный детектор с фоном несущей частоты. Полученный на выходе сигнал пропорционален измеряемой деформации. Этот сигнал подается па миллиамперметр или гальванометр осциллографа. В каждом блоке усилителя имеется переключатель для ступенчатого измерения коэффициента усиления. Приборы типа «Топаз» и «Нефрит» - усилители постоянного тока, работают па транзисторах. К усилителю «Нефрит», кроме гальванометров светолучевых осциллографом, могут быть подключены электронные осциллографы и магнитограф. Светолучевые осциллографы предназначены для визуалынго наблюдения и синхронной записи на фотоленте функций одной или нескольких (до 30). исследуемых величин времени, называемых осциллограммами. Это обеспечивается набором гальванометров с различными собственными частотами и широким диапазоном скоростей движения фотоленты. Ток от первичного прибора проходит по петле или рамке гальванометра и, взаимодействуя с магнитным полем, вызывает поворот зеркала пропорционально току. Световой луч (рис. 9.9) проходит через систему линз и отражается от зеркала гальванометра на движущуюся фотоленту. Вращающийся зеркальный барабан дает развертку изображения на экране для визуального наблюдения и позволяет выбрать скорость и масштабы так, чтобы отдельные осциллограммы, полученные от нескольких гальванометров, не накладывались друг на друга и были пригодны для последующей расшифровки.
Рис. 9.9. Принципиальная схема светолучевого осциллографа: 1 – лампа; 2 – конденсатор; 3,6 – линзы; 4 – зеркало гальванометра; 5 – гальванометр; 7 – фотолента; 8 – зеркало; 9 – барабан; 10 - экран
Электронно-лучевые осциллографы применяются для визуального наблюдения и фотографирования высокочастотных процессов, когда светолучевые осциллографы непригодны. Электронно-лучевые осциллографы С 8-9А, С 8-1 и С 8-12 снабжены запоминающими электронно-лучевыми трубками, обеспечивающими сохранность в течение определенного времени записанного изображения и возможность его повторного воспроизведения. Быстродействующие самопишущие приборы применяют для регистрации 1-9 процессов с частотой до 100 Гц и более (рис. 9. 10). Принцип работы самопишущих приборов основан на повороте в магнитном поле рамки из тонкого провода, к которой прикреплен пишущий рычаг с гибкой трубкой (капилляр последней заполнен чернилами). Под действием электрического тока, подведенного к выводам рамки, создается крутящий момент, и рычаг поворачивается на соответствующий угол. На движущейся бумажной ленте получают запись изменения тока во времени в криволинейной системе координат. Простота работы, получение записи осциллограммы на диаграммной ленте малая чувствительность к вибрации основания - преимущества приборов. Недостатки - ограниченный диапазон частот и относительно большая инерционность записывающей системы, малое число каналов и криволинейная система координат записи показаний приборов. Разновидностью описанных приборов являются самописцы уровня, фиксирующие при записи только пиковые значения сигналов. Магнитографы (рис. 9.11) предназначены для записи на магнитную ленту и последующего многократного воспроизведения выходного сигнала от первичного прибора. Такой способ записи информации позволяет применить автоматизированные методы обработки результатов измерений на ЭВМ. Эпюрографы позволяют воспроизводить на экране и регистрировать на фотоленте мгновенные эпюры распределения деформаций исследуемых конструкций. Осциллографический эпюрограф Н 031 (рис. 9.12), позволяет одновременно наблюдать за показаниями 12 тензорезисторов на экране размером 110
Рис. 9.10. Схема быстродействующего самопишущего прибора: 1 – подвижная рамка; 2 – спиральная пружина; 3 – магнит; 4 – пишущий рычаг; 5 – трубка для подачи чернил; 6 – чернильница; 7 – бумага с координатной сеткой
Рис.9.11. Блок – схема магнитографа: 1- подающая катушка; 2 – магнитная лента; 3 – приемная катушка; 4 – 6 – магнитные головки стирания записи и воспроизведения; 7 – генератор несущей частоты; 8 – модулятор; 9,10 – усилители записи и воспроизведения; 11 – демодулятор; 12 - генератор стирания
Рис.9.12. Схема осциллографа - эпюрографа Н031: а – общий вид; б – экран эпюрографа; 1- кронштейн для установки фотоаппарата; 2 – приспособление для фотографирования эпюр; 3 – эпюрная кассета; 4 - измерительный блок; 5- панель управления; 6 – экран эпюрный
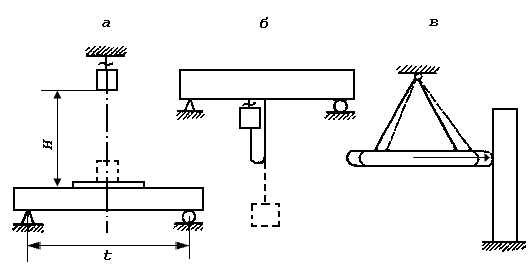
9.3. Способы нагружения и принципы размещения измерительных приборов Наиболее простой способ загружения - ударной нагрузкой. Ударная нагрузка создается ударами вертикально падающего груза или путем сбрасывания груза, прикрепленного к конструкции гибкой тягой и динамометрическим элементом, горизонтальными ударами (рис. 9.13). Вынужденные колебания могут создаваться ненаправленными или направленными центробежными вибраторами (рис. 9.14, а), а также вибромашинами (рис. 9.14, б). Для стендовых испытаний на выносливость применяются гидравлические пульсаторы (рис. 9.15). Приборы устанавливают в тех сечениях конструкции, которые позволяют получить наиболее важные параметры колебаний, необходимые для оценки ее напряженно-деформированного состояния. Например, в местах возникновения наибольших прогибов, продольных и угловых перемещений. Учитывая трудоемкость обработки результатов измерений и дефицитность измерительных приборов и материалов для записи осциллограмм, приборы обычно устанавливают в минимальном количестве с дублированием в самых ответственных сечениях конструкции. Некоторые из них в процессе испытаний могут переставляться для записи показаний в различных сечениях конструкции. Работа отметчиков времени всех самопишущих приборов должна быть синхронизирована с включением и выключением приборов по заданной программе. При испытании конструкции подвижной нагрузкой,
Рис.9.13. Методы создания ударной нагрузки: А – падающим грузом; б – сбрасыванием груза; в – тараном
Рис. 9.14. Схема работы центробежного вибратора и вибромашины направленного действия
например, подкрановой балки мостовым краном, это обеспечивается нажимными включателями и выключателями, расположенными в начале и в конце балки. Подготовительные работы завершаются проверкой, настройкой и отладкой работы приборов всего измерительного комплекса. Подготовительные работы и испытания значительно упрощаются, если организация, ведущая испытания, располагает передвижной виброметрической лабораторией, оборудованной в кузове специального автобуса.
Рис. 9.15.Схема гидравлического пульсатора: 1- рабочая жидкость; 2 – плунжерный барабан; 3 – гидронасос; 4 – гидродомкрат; 5 – испытываемая конструкция
Испытания проводят в строгом соответствии с программой по временному графику. В процессе испытания включаются и выключаются виброизмерительные приборы, контролируется их работа, ведутся наблюдения за отдельными соединениями конструкции и ее поведением в целом, за характером возникновения и развития трещин, заполняется журнал наблюдений. В журнале наблюдений приводят краткую характеристику испытываемой конструкции, вычерчивают схему установки и привязки измерительных приборов с указанием базы, масштаба измерения, места и времени проведения испытаний, температуры воздуха и особых условий работы. В журнале регистрируют все испытательные нагрузки в порядке их приложения и продолжительности воздействия, записывают отсчеты по приборам, имеющим шкалы для визуального наблюдения. Для удобства последующей обработки осциллограмм в журнале для каждого номера кассеты указывают номера гальванометров, масштабы увеличения деформаций, скорости движения ленты, этапы загружения, время выключения н включения осциллографов. На всех осциллограммах (на обратной стороне ленты) указывают номер кассеты, дату проведения испытания, название испытываемой конструкции, вид нагрузки, название и марку измерительной аппаратуры, и заводские номера гальванометров и вибропреобразователей. Первичные результаты испытаний обрабатываются в ходе эксперимента. По ним можно сделать предварительную оценку напряженно-деформированного состояния конструкции, судить о правильности работы нагрузочных устройств и измерительной аппаратуры, а при необходимости вносить коррективы в методику испытаний. Параллельно с осциллографами желательно применять самопишущие приборы, по показаниям которых можно визуально наблюдать за ходом эксперимента. В некоторых случаях испытания проводят в несколько этапов, после обработки и анализа результатов измерений на каждом из них. Это позволяет внести необходимые изменения в методику эксперимента с учетом недостатков, обнаруженных при обработке материалов предшествующих этапов испытаний.
9.4. Оценка состояний конструкций по результатам динамических испытаний. Оценка опытных данных позволяет решить те задачи, которые поставлены программой испытаний. Например, оценить принятую методику расчета конструкции, выявить характер воздействия динамических нагрузок, установить напряжения я деформации, определить остаточные деформации, качество изготовления, обнаружить дефекты и их влияние на несущую способность и долговечность. Анализ результатов испытаний должен носить комплексный характер с учетом взаимодействия различных факторов и базироваться на методах теории вероятностей и математической статистики. Повторные динамические испытания конструкций, проводимые через определенный промежуток времени, позволяют получить объективную оценку напряженно-деформированного состояния, проанализировать характер развития выявленных, ранее дефектов и сделать заключение о необходимости усиления конструкции. Экспериментальные значения динамических характеристик, таких, как амплитуда, частота колебаний, скорость, ускорение, коэффициент поглощения, позволяют проверить требования к режиму нормальной эксплуатации и предупредить явление резонанса. Для предотвращения резонанса частота собственныхивынужденных колебаний должна отличаться не менее чем па 20 %. Если амплитуда колебаний не превышает 1/5 10 пролета конструкции, влияние динамической нагрузки на ее несущую способность не учитывается. Колебания строительных конструкций оказывают неблагоприятное влияние не только на прочностные характеристики конструкции, но также на людей и технологические и процессы. На человека колебания оказывают отрицательные психологические воздействия и могут вызвать тяжелые физиологические расстройства (виброболезнь). В производственных и жилых зданиях устанавливаются предельно допустимые уровни вибрации, пиковые ил и усредненные значения перемещений, скоростей и ускорений, которые назначаются с учетом продолжительности воздействия с внесением поправок на время суток и характер воздействия. В электронной, оптико-механической и машиностроительной отраслях промышленности некоторые технологические операции производятся под микроскопом, с точностью до долей микрона. В этих случаях допустимые уровни вибраций строго ограничены и для их соблюдения предусматриваю специальные мероприятия по уменьшению или устранению колебаний. Динамические характеристики конструкций могут быть улучшены за счет изменения их жесткости, путем уравновешивания, балансировки и изменения частоты вращения машины, юз результате изменения схемы установки оборудования, а также применения активной или пассивной виброизоляции. Жесткость конструкции можно увеличить или уменьшить изменением ее пролета, размеров поперечного сечения или конструктивной схемы, созданием предварительного напряжения, устройством массивного или легкого постамента под уравновешенную машину. Жесткость конструкции увеличивают в тех случаях, когда требуется увеличить частоту свободных колебаний, чтобы не допустить резонанса. При этом уменьшаются прогибы от статической идинамической нагрузок и динамический коэффициент
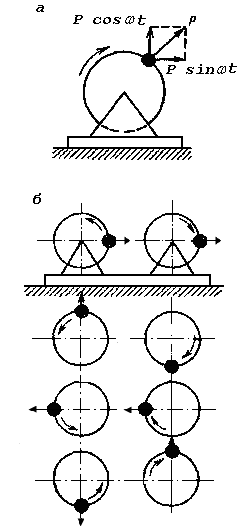
Рис. 9.16.Уравновешивание машин: а - при вращении; б - при возвратно-поступательном движении
Если амплитуда колебаний достаточно велика и составляет значительную часть прогиба от полезной статической нагрузки с учетом веса конструкции, можно несколько уменьшить ее жесткость за счет увеличения пролета, уменьшения размеров сечения или устройства под оборудование массивного постамента без прочной связи его с конструкцией. Но при этом должны быть обеспечены требования, вытекающие из расчетов по двум группам предельных состояний (по несущей способности и деформациям), что возможно, если динамический коэффициент Неуравновешенные машины с вращающимися массами подлежат статической в динамической балансировке. Уравновешивание масс, вращающихся с большим эксцентриситетом, показано на рис. 9.16 а, уравновешивание кривошипно-шатунного механизма на рис. 9.16, б. Уменьшение колебаний в приведенных примерах достигается взаимным погашением результирующей R, направленной в противоположные стороны при вращении механизма. При определени амплитуды колебаний различают пять частотных зон: предрезонансную; первую резонансную; междурезонансную; вторую резонансную; зарезонансную. Если можно изменить частоту вращения установленной на перекрытии машины, колебания перекрытия могут быть значительно уменьшины, при этомнеобходимо исключать попадание во 2-ую или 4-уюрезонансную зону. Колебания конструкции можно уменьшить правильным размещением машин на перекрытии. Например, машина с возвратно-поступательными вертикально движущимися частями должна располагаться у опор, а с горизонтально движущимися - вдоль балок перекрытия, чтобы направление сил инерции совпадало с осями несущих конструкций, обладающих большой жесткостью.
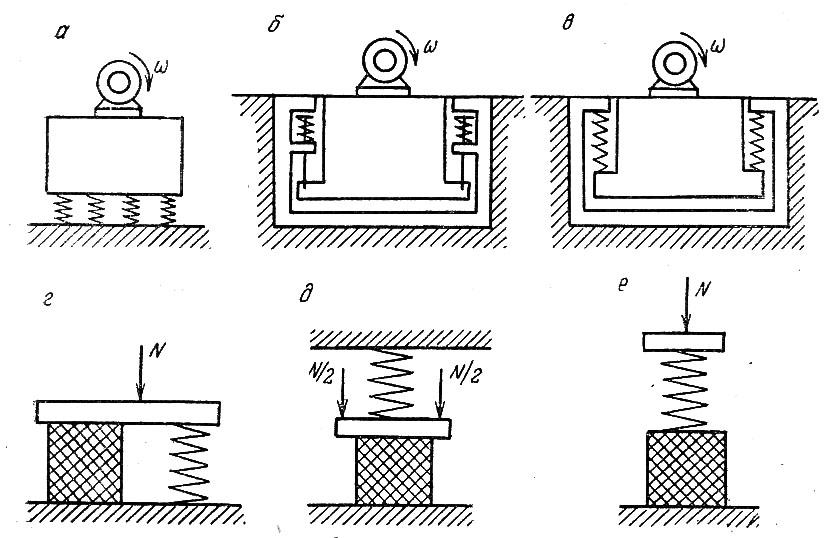
Рис. 9.17. Виды виброизоляции: а - сжатыми пружинами; б - подвесными стержнями и пружинами; в - растянутыми пружинами; г- е - комбинированная виброизоляция резиновами элементами и пружинами с параллельным (г, д) и последовательным (е) соединением
Эффективный способ уменьшения колебаний несущих конструкций - применение активной виброизоляции - изоляции возбудителя колебаний (рис 9.17, а, б, в) с целью уменьшения динамических нагрузок и воздействий, передаваемых на конструкцию. Пассивная изоляция (рис. 9.17, г, д, е,) применяется с целью предохранения приборов и оборудования, чувствительных к вибрации, от колебаний конструкций, на которых они находятся. Расчет и проектирование виброизоляции производятся на основании расчетов. Виброизоляция, примененная без расчета, в некоторых случаях приводит не к снижению, а к значительному увеличению колебаний конструкций, что недопустимо.
|
||
|
|
Последнее изменение этой страницы: 2016-12-28; просмотров: 1232; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.170 (0.016 с.) |

 в магнитопроводе (рис. 9.5, а) или положения сердечника в катушке (рис. 9.5, б) происходит изменение индуктивного сопротивления катушки и тока цепи.
в магнитопроводе (рис. 9.5, а) или положения сердечника в катушке (рис. 9.5, б) происходит изменение индуктивного сопротивления катушки и тока цепи.

 между пластинами (рис. 9.5 ), изменения площади пластин конденсатора при их взаимном перемещении (рис. 9.6, б ) или изменения диэлектрической проницаемости
между пластинами (рис. 9.5 ), изменения площади пластин конденсатора при их взаимном перемещении (рис. 9.6, б ) или изменения диэлектрической проницаемости  (рис. 9.6, в).
(рис. 9.6, в).
 (рис. 9.7, а). Базу рекомендуется выбирать так, чтобы
(рис. 9.7, а). Базу рекомендуется выбирать так, чтобы  . В зависимости от конструкции решетки, вида основы и способа соединения выводных проводов динамический диапазон измерений тензорезисторов находится в пределах 107-103 симметричных циклов изменения напряжений. Наибольшей стойкостью отличаются тензорезисторы на пленочной основе с петлевой решеткой из медно-никелевых пластифицированных сплавов. Повышения динамической стойкости тонзорезисторов достигают введением разгружающих петель (рис. 9.7, в),отгибом основы за пределами базы (рис. 9.7, б)или креплением выводных проводов под углом к оси решетки (рис. 9.7, г).
. В зависимости от конструкции решетки, вида основы и способа соединения выводных проводов динамический диапазон измерений тензорезисторов находится в пределах 107-103 симметричных циклов изменения напряжений. Наибольшей стойкостью отличаются тензорезисторы на пленочной основе с петлевой решеткой из медно-никелевых пластифицированных сплавов. Повышения динамической стойкости тонзорезисторов достигают введением разгружающих петель (рис. 9.7, в),отгибом основы за пределами базы (рис. 9.7, б)или креплением выводных проводов под углом к оси решетки (рис. 9.7, г).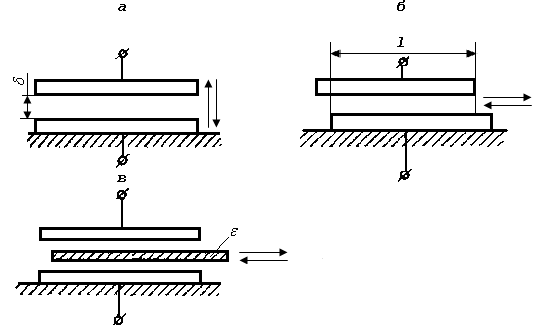

 и компенсационного
и компенсационного тензоризисторов при динамических испытаниях:
тензоризисторов при динамических испытаниях:
 120 мм и регистрировать их на трех фотолентах шириной 120 мм и длиной до 10 м. Запись ведется одновременно на три кассеты с четырех каналов для каждой из них.
120 мм и регистрировать их на трех фотолентах шириной 120 мм и длиной до 10 м. Запись ведется одновременно на три кассеты с четырех каналов для каждой из них.



 . Например, замена свободно опертой балки балкой с упругозащемленными концами почти вдвое повышает частоту свободных колебаний. Аналогичный результат может быть получен повышением степени статической неопределимости конструкции за счет введения дополнительных связей или устройства под неуравновешенную машину легкого, но жесткого постамента, прочно прикрепленного к конструкции.
. Например, замена свободно опертой балки балкой с упругозащемленными концами почти вдвое повышает частоту свободных колебаний. Аналогичный результат может быть получен повышением степени статической неопределимости конструкции за счет введения дополнительных связей или устройства под неуравновешенную машину легкого, но жесткого постамента, прочно прикрепленного к конструкции.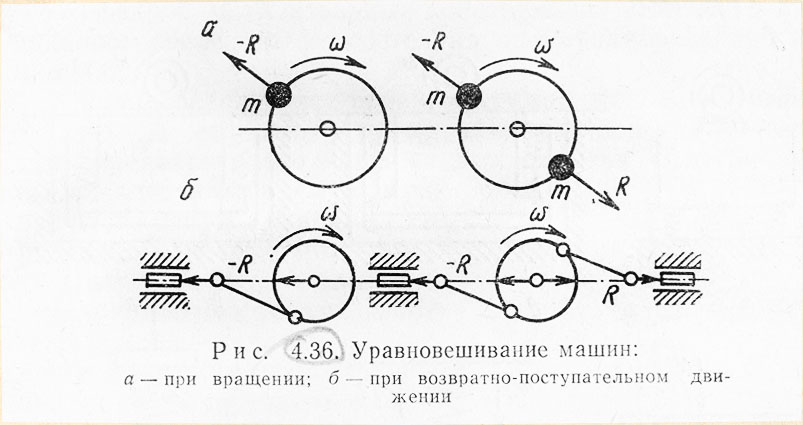
 при незначительном снижении жесткости уменьшается в несколько раз.
при незначительном снижении жесткости уменьшается в несколько раз.