Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Підсилювачі рульового керуванняСодержание книги
Поиск на нашем сайте
Більшість сучасних автомобілів та автобусів обладнані підсилювачами рульового керування. Ці пристрої значно полегшують керування та підвищують безпеку руху автомобіля. Найбільше розповсюдження знайшли конструкції гідравлічних підсилювачів. Легкові автомобілі останнім часом все більше обладнують електричними підсилювачами. Конструкції пневматичних підсилювачів широкого розповсюдження не знайшли.
Рис. 40. Схеми компоновок рульових керувань з підсилювачем.
Призначення
Для полегшення керування, підвищення маневрування та безпеки руху при розриву шини. Вимоги:
1. Можливість керування, при виходу з ладу підсилювача. 2. Мінімальний час спрацювання. 3. Мінімальний вплив на стабілізацію коліс. 4. Забезпечення пропорціональності між кутом повороту рульового колеса та кутом повороту керованих коліс та пропорціональності між зусиллям прикладеним до рульового колеса та зусиллям супротиву повороту керованих коліс.
Класифікація:
1.За типом підсилювача: Електричні, гідравлічні, повітряні. 2.За місцем розташування підсилювача: Разом з рульовим механізмом або окремо.
Рис. 41. Рульовий механізм ЗИЛ-131 типу “гвинт-гайка-рейка-сектор “ з гідравлічним підсилювачем:
1 – картер рульового механізму з кронштейном кріплення до несучої системи; 2 – нижня кришка картера; 3 – зубчатий сектор вала сошки; 4 – поршень – рейка; 5 – заглушка поршня – рейки; 6 – канал для входу (виходу) масла; 7 – гвинт рульового механізму; 8 – кульова гайка; 9 – жолоб для перекочування куль; 10, 31 кулі; 11 – ущільнююча втулка; 12 – проміжна кришка картера; 13 – золотник клапана керування гідро підсилювачем; 14 – зворотній клапан; 15 – штуцер зливу масла з гідравлічного підсилювача у масляний радіатор; 16 – ущільнююче сідло штуцера подачі масла; 17 – отвір для штуцера подачі масла; 18 – упорний підшипник гвинта; 19 – регулювальна гайка; 20 – гумовий сальник; 21 – зовнішня манжета сальника; 22 – упорне кільце сальника; 23 – конічна пружинна шайба; 24 – верхня кришка картера; 25 – корпус клапана керування; 26 – пружина плунжера; 27 – реактивний плунжер; 28 – пружне розрізне кільце гвинта; 29 – внутрішня порожнина картера; 30 – пружне розрізне кільце; 31 – установочний стопор гайки; 32 – вал сошки рульового керування; 33 – втулка вала сошки; 34 – магнітна пробка зливу масла; 35 – канал подачі масла у внутрішню порожнину картера; 36 – канал подачі масла у зовнішню порожнину картера; 37 – канал для зливу масла із гідро підсилювача; 38 – регулювальна гайка вала сошки; 39 – регулювальний гвинт осьового переміщення вала сошки; 40 – стопорна гайка гвинта; 41 – упорна шайба гвинта; 42 – бокова кришка картера.
Розподільник та гідроциліндр підсилювача (рис.6.41) виконані за одно ціле з рульовим механізмом, який закріплений болтами на подовжньому лонжероні несучої системи автомобіля. Картер рульового механізму слугує гідроциліндром підсилювача. Знизу картер 1 закритий кришкою 2. Поршень 4 поділяє циліндр на дві порожнини, кожна з котрих з’єднана з відповідними камерами розподільника. Опорами гвинта 7, що може незначно пересуватися в осьовому напряму (приблизно 1,1 мм), служить голчатий підшипник в кришці 24 та кульова гайка 8, що закріплена в поршні 4. Гвинт 7 ущільнений в проміжній кришці ущільнюючою втулкою 11, а у поршні заглушкою 5. Нерухомі частини рульового механізму ущільнені гумовими кільцями. Гумове ущільнення 20, що захищене упорним кільцем 22, ущільнює вал сошки. Зазор в зачепленні зубів рейки та сектора регулюють, зміщуючи в осьовому напрямку вал сошки, так як зуби мають змінну по довжині товщину. На золотнику є три пояски, а в корпусі розподільника-три отвори у вигляді кільцевих канавок. Золотником 13 створюються у корпусі 25 дві порожнини. Рідина від насоса поступає по трубопроводу у середній отвір в корпусі розподільника 25. А відводиться від двох крайніх отворів розподільника 25. У кожному з шести каналів розподільника 25 встановлено між проміжною та верхньою кришками 24 по два реактивних плунжера 27. Кожна пара плунжерів притискається пружиною 26. Внутрішні порожнини каналів з реактивними плунжерами 27 з’єднуються з середнім отвором корпуса 25.
Рис. 6.42. Схема роботи гідравлічного підсилювача ЗИЛ-131
Положення деталей гідравлічного підсилювача (рис. 42) відповідає прямолінійному руху автомобіля, коли плунжери, що находяться під дією стиснутих реактивних пружин і тиску масла, заставляють золотник зайняти в корпусі середнє нейтральне положення. При цьому масло перекачується насосом в бачок, оскільки золотник знаходиться у нейтральному положенні і нагнітальний та зливний канали сполучені між собою. Під час повороту праворуч гвинт викручується з кульової гайки і пересувається разом з золотником до упора великого кільця підшипника в торець корпуса. В результаті порожнина праворуч від поршня з’єднається з каналом високого тиску, а порожнина ліворуч від поршня з зливним каналом. Поршень під тиском масла буде пересуватися вліво від золотника, обертаючи вал сектора з сошкою і через рульові тяги колеса повертатимуться праворуч. Зусилля реактивних пружин під час повороту передається на рульове колесо. Тиск рідини на реактивні плунжери збільшується по мірі збільшення опору повороту керованих коліс, що збільшує зусилля на рульовому колесі. При відмові у роботі гідравлічного підсилювача водію необхідно прикладати до рульового колеса значно більші зусилля, так як необхідно долати опір на витіснення рідини з однієї порожнини до іншої.
Рис. 43. Рульовий механізм рейкового типу з гідропідсилювачем та силовим циліндром у рульовому приводі коліс
Рис. 44. Рульовий механізм рейкового типу з гідравлічним підсилювачем автомобіля Ауді А8 з силовим циліндром у рейці
В наведеній (рис.44) конструкції рульова тяга лівого колеса шарнірно з’єднана з лівим кінцем рейки. Рульова тяга правого колеса шарнірно з’єднана з правим кінцем рейки з поршнем. Силовий циліндр з’єднаний з корпусом рульового механізму. Права та ліва рульові тяги складаються з двох частин – трубчастої та осьової. Різьбове з’єднання трубчастої та осьової частин тяг дає можливість регулювати сходження керованих коліс.
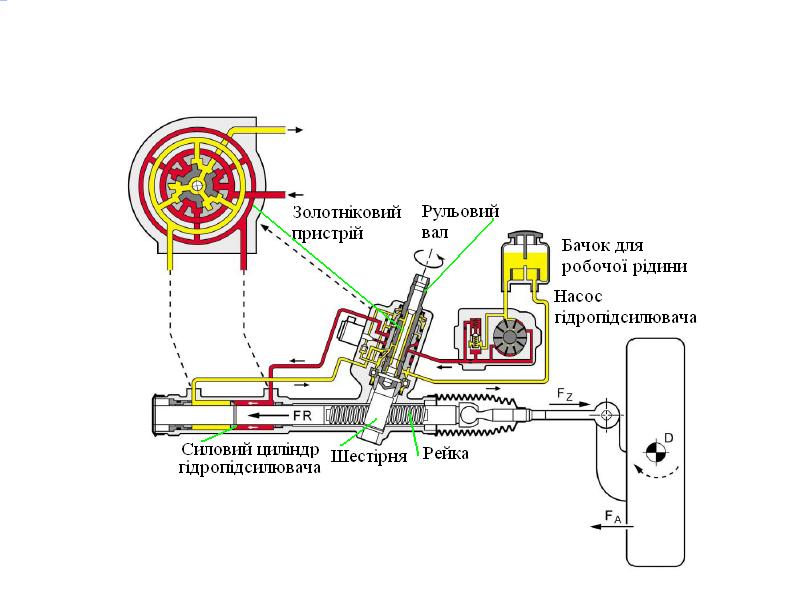
Рис. 45. Принцип дії гідравлічного підсилювача рульового керування автомобіля Ауді А8 під час повертання автомобіля праворуч
Силовий циліндр (рис.6.45) розташований разом з рейкою. Золотниковий пристрій розташований у рульовому механізмі на рульовому валу. Насос гідравлічного підсилювача з гідробачком розташовані окремо.
Рис. 46. Лопатний насос гідравлічного підсилювача руля (поперечний розріз)
Рис. 47. Загальний вигляд насоса гідравлічного підсилювача руля з пасовим приводом
Рис. 48. Конструкція електромеханічного рульового керування з автономними приводами рульових механізмів
Конструкцією (рис.6 48) вбудовано в корпусі рульового механізму дві шестеренчаті передачі від рульового колеса та від електродвигуна, які безпосередньо контактують з рейкою. Для узгодженого керування роботою рульового керування передбачена електронна система керування підсилювачем, яка в залежності від крутного моменту на рульовому колесі створює ефективне зусилля на рейці.
Рис. 49. Схема роботи електромеханічного рульового керування з автономними приводами рульових механізмів
Рис. 50. Датчик крутного моменту рульового керування Toyota. Датчик крутного моменту складається з багатополюсного магніту який розташований на вхідному валу і статора розташованого на вихідному валу
Рис. 51. Електричний підсилювач рульового керування Toyota з безщітковим електродвигуном та передаванням зусилля на рульовий вал
Рис. 52. Електронна система стабілізації траекторії руху. ESP (Electronic Stability Programm):
1-блок керування АБС; 2- датчик швидкості обертання колеса; 3- датчик кута повороту руля; 4- датчик бокового прискорення та кутової швидкості; 5- електронний блок керування; 6- електропривод керування подачі палива; 7- датчик тиску в гальмівній системі. На деяких автомобіля БМВ встановлюється активна система керування передніми колесами AFS (Active Front Steering). Планується застосування рульового керування Steer by wire, тобто не буде жорсткого механічного зв’язку між водієм та колесами, а на кожне колесо буде встановлено свій електродвигун повороту колеса.
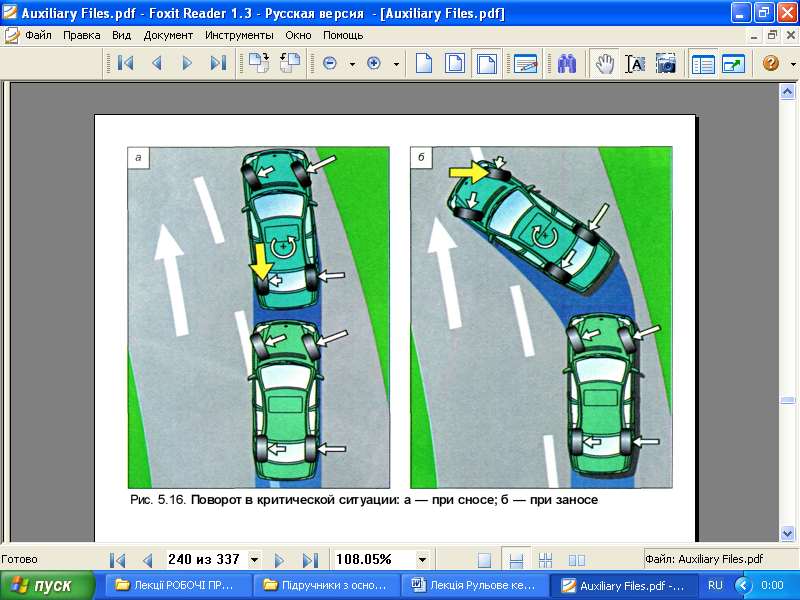
Рис. 53. Керування автомобілем в критичній ситуації на завороті дороги
а) - під час втрати зчеплення з поверхнею дороги передніх коліс електронна система стабілізації руху автоматично гальмує заднє ліве колесо і рульове колесо повертається у сторону занесення. б) - під час втрати зчеплення з поверхнею дороги задніх коліс гальмується переднє праве колесо і рульове колесо повертається у сторону занесення.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-10; просмотров: 576; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.12.88 (0.011 с.) |