Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчёт вероятности исправного и работоспособного состояния технологических систем при отказах первого и второго рода с использованием цепей Маркова.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
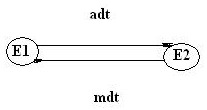
Показатели надежности в настоящее время чаще всего характеризуют 1 функцию – технологическую, т.к. она обладает отказными признаками, которые позволяют четко зафиксировать моменты возникновения отказа и окончания процесса восстановления работоспособности изделий или систем. ТФ, БФ (безопасная функция) – трудно-поддающееся оценке, т.к. показатели безопасного функционирования не разработаны. Для этой цели пользуются цепями Маркова с дискретным временем. С их помощью надежность рассматриваемых систем, описывающихся системой дифференцируемых уравнений, решение которых позволяет получать показатели, характеризующие каждое состояние. Рассматривая схему функций одиночного элемента во времени и графических состояний, рис. 1.10.
Под воздействием потока отказов, λ в момент времени Т1 элемент переходит из работоспособного состояния Е1 в неработоспособное состояние Е2. Здесь происходит отказ; через некоторое время под воздействием потока восстановления изделие возвращается в работоспособное состояние- Е1 в момент времени t2. При экспоненциальным распределении наработок до отказа.
P1(t)=μ/λ+μ. [1+λ/μ*e-(λ+μ/t)] (39) P2(t)=λ/λ+μ. [1-e-λ+μ/t]. (40) Вероятность рассчитывается по формуле (39). Р1(t) – коэффициент готовности или вероятность пребывания в работоспособном состоянии.. Р2(t) – вероятность простая или вероятность пребывания в неработоспособном состоянии. При t→∞
На практике часто используют другое выражение:
, где Та ср – среднее время аварийного простоя. Обычно:
Из формул (39)- (42) => что надежность изделий, функционируемых с восстановленной характерной средней наработкой и среднем временем восстановления. Для не восстановленных изделий 43. Рассмотрим функционирующее изделие, которого μ/находится в нескольких состояниях: § Е0 – исправное; § Е1 – работоспособное; § Е2 – неработоспособное; § Е3 – неисправное. Е0 – система способна выполнять все функции ТФ и БФ.
БФ – отказными признаками не обладает. Непрерывный контроль за большим числом элементов, обеспечивающих безопасную функцию, не оказывает непосредственного влияния на работоспособность, кроме цепей управления и защиты. В силу этих причин система БФ до тех пор, пока данное нарушение не будет выявлено и устранено в результате ТО и Р. Пусть система выполняет 2 функции: ТФ и БФ, т.е. находим в исправленном состоянии Е0 соответствующее обеспечению. § Е1 – соответствует работоспособному состоянию технологической функции и нарушение БФ; § Е2 – нарушение ТФ; § Е3 – БФ. В течение времени Еt1 изделие исправно и работоспособно. В данном случае обеспечивается выполнение ТФ и БФ. В некоторый момент времени в т. 1 происходит отказ, который вызывает прекращение выполнения ТФ, но БФ не нарушается => состояние Е2. В течение времени ТВ1 – изделие восстанавливает в результате чего обеспечивают его исправность и работоспособность => Е0 и Е1. Переход из Е0, Е1↔ Е2 происходит под воздействием потока отказов λ1 и восстановлений μ1. Разница м/д вероятностью Rос и Р2 характеризует относительную продолжительность эксплуатации объекта с нарушенной БФ
ΔR – относительная вероятность эксплуатации объекта с нарушенной БФ. Этот же показатель характеризует совершенство объекта с точки зрения органичности связи между ТФ и БФ. Вероятность Roc позволяет определить ожидаемую или вероятную длительность эксплуат. объекта с нарушенной БФ.
т – рассматриваемое время. Отказы, которые не вызывают нарушений безопасных функций называют отказами 1 рода. Поскольку при отказах 1 рода прерывается только работоспособность, то функционирование изделия может быть описано по аналогии с (41), (42). Р11= μ1/λ1+μ1, (45) Р21=λ1/λ1+μ1. (46)_. Р11 – вероятность исправного состояния по отношению к отказам 1 рода. Р21 – вероятность простая под воздействием отказов 1 рода. В некоторый момент времени Т3 пусть возникает отказ, при котором нарушается не только ТФ, но и БФ функция. После восстановления в течении времени Тв2 изделие вновь приобретает утраченные свойства, такие, которые приводят к нарушению ТФ и БФ. Их называют отказами 2 рода. Анализ упрощенных графических переходов показывает, что для описания процесса функционирования необходимо наличие по крайней мере 2 видов показателей. Характеризующих как ТФ так и БФ. Переход в состояние с нарушенной БФ происходит под воздействием тех же потоков отказа, что и с прекращение м ТФ, а процесс восстановления взаимосвязаны. Поэтому и вероятности, характеризующие эти состояния могут быть численно равны, хотя и отражают разные явления. Для отказов 2 рода имеется след система показателей:
5. показатели работоспособности по аналогии с отказами 1 рода (45-46)
6. показатели безопасности
Р12 и Р22 – вероятности работоспособного состояния и простоя по отношению к отказам 2 рода. R02 и R12 – вероятность исправного состояния средств обеспечения БФ и вероятность опасного состояния изделия или системы. Т.о. нарушение БФ как следствие отказов 2 рода выражается через вероятность опасного состояния, которое численно равно вероятности простоя Р22 из-за отказов 2 рода. Работоспособность нарушается при отказах 1 и 2 рода. Поэтому вероятность исправного состояния и работоспособного может быть рассчитана по формуле:
17. Случаи нарушения безопасностной функции на технологических системах. Показатели для описания безопасностных свойств систем. Допущения, принимаемые для определения вероятности опасного состояния. Расчёт относительной продолжительности эксплуатации объекта с нарушенной безопасностной функцией. БФ может быть нарушена в случае: 1. при отказе узла или элемента системы, приводящего к нарушению ТФ и БФ. 2. При неквалифицированных, преднамеренных действиях персонала в процессе восстановления работоспособности из-за восстановления отказов 2 рода. 3. При неквалифицированных, преднамеренных действиях в ходе монтажно-демонтажных работ. Т.о показатель, характеризующий безопасностные свойства любой системы д/отражать как факт нарушения БФ, так и продолжительность пребывания в состоянии БФ. Такими свойствами обладают комплексные показатели, аналогичные К готовности. Однако, в действующей НТКД, такие показатели не предусмотрены. Для оценки безоп свойств введем комплексный показатель вероятности опасного и исправленного состояния.
|
||||||
|
|
Последнее изменение этой страницы: 2016-09-20; просмотров: 1234; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.238.150 (0.01 с.) |



 (38)
(38) , условие P1(t)+P2(t)=1.
, условие P1(t)+P2(t)=1. (41)
(41) . (42)
. (42) (43)
(43) (44)
(44) в качестве показателей надобности использовать вероятность безотказной работы, предполагая, что наработка до отказа подчиняется ехр закону. Вероятность простоя используется для экономического выражения надёжности.
в качестве показателей надобности использовать вероятность безотказной работы, предполагая, что наработка до отказа подчиняется ехр закону. Вероятность простоя используется для экономического выражения надёжности. , λ=1-Кг, рис.1.11.
, λ=1-Кг, рис.1.11.

 (47)
(47)  (48)
(48) (49)
(49)  (50)
(50)