Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
В разомкнутой системе для непосредственного управления объектом применяется специальное исполнительное устройство, а обратная связь отсутствует.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Содержание Предисловие.............................................. 14 Глава 1. Введение в системы управления........................ 21 Обзор....................................................... 21 1.1. Введение................................................. 21 1.2. История автоматического управления............................. 23 1.3. Два примера использования обратной связи........................ 26 1.4. Управление на практике...................................... 28 1.5. Примеры современных систем управления......................... 29 1.6. Автоматическая сборка и роботы................................ 35 1.7. Перспективы развития систем управления......................... 37 1.8. Техническое проектирование................................... 38 1.9. Синтез системы управления.................................... 39 1.10. Пример синтеза: управление скоростью вращения диска.............. 41 1.11. Пример синтеза: система управления введением инсулина............. 43 1.12. Пример синтеза с продолжением: система чтения информации с диска.... 44 Упражнения.................................................. 45 Задачи...................................................... 46 Задачи на синтез систем......................................... 52 Ключевые термины и понятия.................................... 53 Глава 2. Математические модели систем........................ 55 Обзор....................................................... 55 2.1. Введение................................................. 55 2.2. Дифференциальные уравнения физических систем................... 56 2.3. Линеаризация физических систем................................ 60 2.4. Преобразование Лапласа...................................... 63 2.5. Передаточные функции линейных систем.......................... 69 2.6. Структурные схемы........................................... 82 2.7. Модели в виде сигнальных графов............................... 87 2.8. Компьютерный анализ систем управления......................... 91 2.9. Примеры на синтез систем управления............................ 93 2.10. Моделирование систем управления с помощью MATLAB............. 99 2.11. Пример синтеза с продолжением: система чтения информации с диска... 111 2.12. Резюме................................................. 114 Упражнения................................................. 114 Задачи..................................................... 121 Задачи повышенной сложности................................... 134 Задачи на синтез систем......................................... 135 Задачи, решаемые с помощью MATLAB............................. 136 Ключевые термины и понятия.................................... 138 Глава 3. Модели в переменных состояния...................... 139 Обзор...................................................... 139 3.1. Введение................................................ 139 3.2. Переменные состояния динамической системы..................... 140 3.3. Дифференциальные уравнения состояния......................... 143 3.4. Модели систем в переменных состояния в виде сигнального графа....... 145 3.5. Альтернативные модели в виде сигнальных графов.................. 151 3.6. Связь между передаточной функцией и уравнениями состояния......... 155 3.7. Временные характеристики и переходная матрица состояния........... 156 3.8. Дискретный способ вычисления временных характеристик............. 159 3.9. Пример синтеза: ременный привод печатающего устройства принтера.... 164 3.10. Анализ моделей в переменных состояния с помощью MATLAB........ 168 3.11. Пример синтеза с продолжением: система чтения информации с диска... 172 3.12. Резюме................................................. 175 Упражнения................................................. 175 Задачи..................................................... 178 Задачи повышенной сложности................................... 187 Задачи на синтез систем......................................... 189 Задачи, решаемые с помощью MATLAB............................. 190 Ключевые термины и понятия.................................... 192 Глава 4. Характеристики систем управления с обратной связью..... 193 Обзор...................................................... 193 4.1. Разомкнутые и замкнутые системы управления..................... 193 4.2. Чувствительность систем управления к изменению параметров.......... 195 4.3. Воздействие на переходную характеристику систем управления......... 199 4.4. Возмущения в системах управления с обратной связью............... 202 4.5. Установившаяся ошибка..................................... 206 4.6. Издержки обратной связи.................................... 208 4.7. Пример синтеза: бурильные машины для тоннеля под Ла-Маншем....... 209 4.8. Пример синтеза: автономный самоходный аппарат для исследования Марса..................................... 212 4.9. Определение характеристик систем управления с помощью MATLAB.... 214 4.10. Пример синтеза с продолжением: система чтения информации с диска... 220 4.11. Резюме................................................. 222 Упражнения................................................. 224 Задачи..................................................... 226 Задачи повышенной сложности................................... 234 Задачи на синтез систем......................................... 237 Задачи, решаемые с помощью MATLAB............................. 239 Ключевые термины и понятия.................................... 242 Глава 5. Качество систем управления с обратной связью........... 243 Обзор...................................................... 243 5.1. Введение................................................ 243 5.2. Тестовые входные сигналы................................... 244 5.3. Качество системы второго порядка.............................. 246 5.4. Влияние третьего полюса и нуля на характеристики системы второго порядка................................................. 252 5.5. Оценка коэффициента затухания............................... 256 5.6. Связь между переходной характеристикой и положением корней на я-плоскости............................................ 257 5.7. Установившаяся ошибка систем управления с обратной связью......... 259 5.8. Установившаяся ошибка систем с неединичной обратной связью........ 263 5.9. Оценки качества........................................... 265 5.10. Упрощение линейных систем................................. 272 5.11. Пример синтеза: управление ориентацией телескопа «Хаббл».......... 275 5.12. Анализ качества систем управления с помощью MATLAB и Simulink............................................... 278 5.13. Пример синтеза с продолжением: система чтения информации с диска... 286 5.14. Резюме................................................. 289 Упражнения................................................. 291 Задачи..................................................... 295 Задачи повышенной сложности................................... 301 Задачи на синтез систем......................................... 303 Задачи, решаемые с помощью MATLAB............................. 305 Ключевые термины и понятия.................................... 307 Глава 6. Устойчивость линейных систем с обратной связью........ 308 Обзор...................................................... 308 6.1. Понятие устойчивости....................................... 308 6.2. Критерий устойчивости Рауса-Гурвица........................... 312 6.3. Относительная устойчивость систем управления с обратной связью...... 320 6.4. Устойчивость систем, описываемых переменными состояния........... 321 6.5. Пример синтеза: управление поворотом гусеничной машины........... 324 6.6. Анализ устойчивости с помощью MATLAB....................... 326 6.7. Пример синтеза с продолжением: система чтения информации с диска.... 333 6.8. Резюме.................................................. 336 Упражнения................................................. 336 Задачи..................................................... 339 Задачи повышенной сложности................................... 343 Задачи на синтез систем......................................... 344 Задачи, решаемые с помощью MATLAB............................. 347 Ключевые термины и понятия.................................... 348 Глава 7. Метод корневого годографа.......................... 349 Обзор...................................................... 349 7.1. Введение................................................ 349 7.2. Понятие корневого годографа................................. 350 7.3. Построение корневого годографа............................... 353 7.4. Пример анализа и синтеза системы управления с помощью метода корневого годографа........................................ 366 7.5. Выбор параметров с помощью корневого годографа................. 370 7.6. Чувствительность системы и корневой годограф.................... 374 7.7. Трёхканальные (ПИД) регуляторы.............................. 380 7.8. Пример синтеза: система управления лазерным манипулятором......... 382 7.9. Синтез системы управления роботом............................ 384 7.10. Построение корневого годографа с помощью MATLAB............. 386 7.11. Пример синтеза с продолжением: система чтения информации с диска... 391 7.12. Резюме................................................. 393 Упражнения................................................. 395 Задачи..................................................... 399 Задачи повышенной сложности................................... 411 Задачи на синтез систем......................................... 414 Задачи, решаемые с помощью MATLAB............................. 421 Ключевые термины и понятия.................................... 422 Глава 8. Метод частотных характеристик....................... 423 Обзор...................................................... 423 8.1. Введение................................................ 423 8.2. Графики частотных характеристик.............................. 426 8.3. Пример построения диаграммы Боде............................ 441 8.4. Измерение частотных характеристик............................. 445 8.5. Требования к качеству системы в частотной области................. 446 8.6. Логарифмические амплитудно-фазовые диаграммы.................. 449 8.7. Пример синтеза: система управления гравировальной машиной......... 451 8.8. Использование MATLAB в методе частотных характеристик........... 453 8.9. Пример синтеза с продолжением: система чтения информации с диска.... 458 8.10. Резюме................................................. 460 Упражнения................................................. 464 Задачи..................................................... 467 Задачи повышенной сложности................................... 477 Задачи на синтез систем......................................... 478 Задачи, решаемые с помощью MATLAB............................. 481 Ключевые термины и понятия.................................... 483 Глава 9. Анализ устойчивости методом частотных характеристик.... 484 Обзор...................................................... 484 9.1. Введение................................................ 484 9.2. Отображение контуров на я-плоскости........................... 485 9.3. Критерий Найквиста........................................ 490 9.4. Относительная устойчивость и критерий Найквиста.................. 499 9.5. Критерии качества во временной и частотной областях............... 506 9.6. Полоса пропускания системы.................................. 512 9.7. Устойчивость систем управления с запаздыванием................... 514 9.8. Пример синтеза: дистанционно управляемый разведывательный аппарат... 517 9.9. Частотные характеристики ПИД-регуляторов...................... 520 9.10. Анализ устойчивости с помощью MATLAB...................... 521 9.11. Пример синтеза с продолжением: система чтения информации с диска... 529 9.12. Резюме................................................. 531 Упражнения................................................. 538 Задачи..................................................... 543 Задачи повышенной сложности................................... 554 Задачи на синтез систем......................................... 557 Задачи, решаемые с помощью MATLAB............................. 562 Ключевые термины и понятия.................................... 564 Глава 10. Синтез систем управления с обратной связью............ 565 Обзор...................................................... 565 10.1. Введение................................................ 565 10.2. Подходы к синтезу системы.................................. 567 10.3. Схемы последовательной коррекции............................ 568 10.4. Коррекция с опережением по фазе: синтез с помощью диаграммы Боде., 572 10.5. Коррекция с опережением по фазе: синтез с помощью корневого годографа............................................... 578 10.6. Синтез систем с применением интегрирующих устройств............. 584 10.7. Коррекция с отставанием по фазе: синтез с помощью корневого годографа............................................... 587 10.8. Коррекция с отставанием по фазе: синтез с помощью диаграммы Боде... 591 10.9. Синтез с помощью диаграммы Боде и использования аналитических методов и компьютеров..................................... 595 10.10. Системы с предшествующим фильтром......................... 597 10.11. Синтез систем с апериодической реакцией....................... 600 10.12. Пример синтеза: система управления намоткой ротора.............. 602 10.13. Пример синтеза: двухкоординатный графопостроитель.............. 606 10.14. Синтез систем с помощью MATLAB........................... 609 10.15. Пример синтеза с продолжением: система чтения информации с диска................................................ 616 10.16. Резюме................................................ 617 Упражнения................................................. 619 Задачи..................................................... 622 Задачи повышенной сложности................................... 636 Задачи на синтез систем......................................... 638 Задачи, решаемые с помощью MATLAB............................. 643 Ключевые термины и понятия.................................... 644 Глава 11. Синтез систем с обратной связью по состоянию.......... 646 Обзор...................................................... 646 11.1. Введение................................................ 646 11.2. Управляемость............................................ 646 11.3. Наблюдаемость........................................... 648 11.4. Оптимальные системы управления............................. 650 11.5. Размещение полюсов с помощью обратной связи по состоянию........ 658 11.6. Формула Аккермана........................................ 663 11.7. Ограничения обратной связи по состоянию....................... 664 11.8. Синтез внутренней модели................................... 664 11.9. Пример синтеза: система автоматического контроля................. 668 11.10. Применение MATLAB и Simulink для синтеза систем с обратной связью по состоянию...................................... 670 11.11. Пример синтеза с продолжением: система чтения информации с диска................................................ 677 11.12. Резюме................................................ 679 Упражнения................................................. 679 Задачи..................................................... 680 Задачи повышенной сложности................................... 684 Задачи на синтез систем......................................... 686 Задачи, решаемые с помощью MATLAB............................. 690 Ключевые термины и понятия.................................... 692 Глава 12. Робастные системы управления...................... 693 Обзор...................................................... 693 12.1. Введение................................................ 693 12.2. Робастные системы управления и чувствительность................. 694 12.3. Анализ робастности........................................ 698 12.4. Системы с неопределенными параметрами....................... 700 12.5. Синтез робастных систем управления........................... 702 12.6. ПИД-регуляторы.......................................... 708 12.7. Синтез робастных систем с ПИД-регуляторами.................... 709 12.8. Пример синтеза: автопилот................................... 714 12.9. Синтез системы управления орбитальным телескопом............... 715 12.10. Синтез робастного привода катушки........................... 717 12.11. Робастная система с внутренней моделью....................... 720 12.12. Синтез сверхпрецизионной системы управления токарным станком с алмазным резцом....................................... 722 12.13. Псевдоколичественный метод синтеза системы с обратной связью..... 725 12.14. Синтез робастных систем с помощью MATLAB.................. 727 12.15. Пример синтеза с продолжением: система чтения информации с диска................................................ 730 12.16. Резюме................................................ 732 Упражнения................................................. 733 Задачи..................................................... 735 Задачи повышенной сложности................................... 741 Задачи на синтез систем......................................... 746 Задачи, решаемые с помощью MATLAB............................. 754 Ключевые термины и понятия.................................... 756 Глава 13. Цифровые системы управления...................... 756 Обзор...................................................... 756 13.1. Введение................................................ 756 13.2. Применение цифровых систем управления....................... 757 13.3. Дискретные системы....................................... 759 13.4. z-преобразование.......................................... 762 13.5. Замкнутые дискретные системы............................... 766 13.6. Анализ устойчивости на z-плоскости............................ 768 13.7. Качество дискретных систем второго порядка..................... 769 13.8. Замкнутые системы с цифровой коррекцией...................... 771 13.9. Система управления движением рабочего стола.................... 774 13.10. Корневой годограф цифровых систем управления................. 776 13.11. Реализация цифровых регуляторов............................ 779 13.12. Анализ цифровых систем управления с помощью MATLAB.......... 780 13.13. Пример синтеза с продолжением: система чтения информации с диска.. 784 13.14. Резюме................................................ 786 Упражнения................................................. 787 Задачи..................................................... 789 Задачи повышенной сложности................................... 791 Задачи на синтез систем......................................... 793 Задачи, решаемые с помощью MATLAB............................. 795 Ключевые термины и понятия.................................... 796 Приложение А. Основы MATLAB.......................... 797 АЛ. Введение................................................ 797 А.2. Инструкции и переменные................................... 798 А.З. Матрицы................................................ 802 А.4. Графика................................................. 805 А.5. Скрипты................................................ 807 Основы MATLAB: задачи....................................... 814 Приложение. Основы Simulink............................ 815 Предметный указатель..................................... 823 управления — это возможность целенаправленного воздействия на механизмы, производственные и экономические процессы в интересах общества. Техника управления базируется на теории обратной связи и анализе линейных систем; она включает в себя также основные положения теории цепей и теории связи. Поэтому она не ограничивается только какой-то одной технической дисциплиной, а в равной степени применима к аэронавтике, химической технологии, механике, экологии, строительству, электротехнике. Очень часто, например, система управления включает в себя элементы электрической, механической и химической природы. Более того, по мере более глубокого понимания динамики бизнеса, социальных и политических процессов будет повышаться и способность управления этими процессами. Система управления — это соединение отдельных элементов в определенную конфигурацию, обеспечивающую заданные характеристики. В основе ее анализа лежит теория линейных систем, предполагающая наличие причинно-следственных связей между элементами. Поэтому процесс или объект, подлежащий управлению, может быть представлен в виде блока, изображенного на рис. 1.1. Связь между входом и выходом — это, по сути, преобразование одного сигнала (причины) в другой (следствие), причем довольно часто с усилением мощности. В разомкнутой системе управления для получения желаемой реакции объекта обычно используется регулятор или исполнительное устройство, как показано на рис. 1.2. В разомкнутой системе обратная связь отсутствует. Таблица 1.1. Избранные этапы развития теории и систем автоматического управления
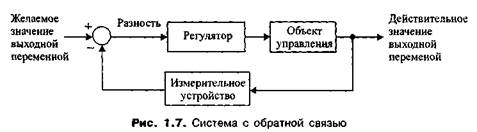
1.3. Два примера использования обратной связи Принцип обратной связи используется для создания замкнутых систем управления, обладающих заданными характеристиками. Конфигурация системы с обратной связью представлена на рис. 1.7. Как ясно из рисунка, в системе вычисляется разность (иначе — ошибка) между желаемым значением выходной переменной и ее достаточно точно измеренным действительным значением. Приводимые ниже два примера показывают, как с помощью обратной связи можно улучшить свойства системы.
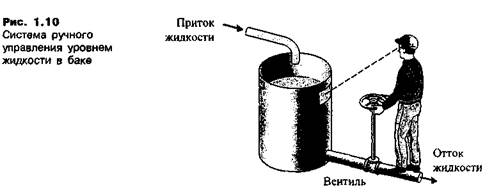
Гарольд С. Блэк в 1921 г. окончил Вустерский политехнический институт и поступил на работу в фирму «Белл лабораториз» корпорации AT&T. В то время главной задачей, над которой работала фирма, было улучшение качества телефонной связи и используемых при этом усилителей сигналов. Блэку было поручено заняться линеаризацией и стабилизацией усилителей, устанавливаемых в тракте передачи голосовых сообщений на расстояния в тысячи миль. Блэк вспоминает: Было утро вторника 2 августа 1927 г., когда во время переправы на пароме через Гудзон по дороге на работу мне внезапно в голову пришла мысль об использовании в усилителе отрицательной обратной связи. Более 50 лет я размышлял, как и почему возникла эта идея, но даже и теперь я не могу сказать, как всё произошло. Я знаю только то, что после нескольких лет работы над проблемой я неожиданно понял, что если подать сигнал с выхода усилителя на его вход, причем в обратной фазе, и воспрепятствовать самовозбуждению усилителя (свисту, как мы позже назвали этот эффект), то я получу именно то, что хотел — способ устранения искажений выходного сигнала. Я раскрыл утреннюю газету Нью-Йорк Тайме и на полях набросал соответствующую схему, дополнив ее формулой для коэффициента усиления с учетом обратной связи. Я подписался под этой схемой, а 20 минут спустя, когда я прибыл в лабораторию на Уэст-стрит, 463, ее также заверил своей подписью ныне покойный Эрл К. Блессинг. Я представил себе, что это решение может привести к разработке усилителей с высокой степенью линейности (при отрицательной обратной связи от 40 до 50 дБ), но оставался один важный вопрос: как я узнал, что смогу избежать самовозбуждения подобной схемы в широком частотном диапазоне, хотя многие вообще сомневались в ее устойчивости? Моя уверенность основывалась на работах, которые я проделал два года назад, занимаясь исследованием оригинальных осцилляторов, и три года назад, когда проектировал оконечные каскады и разрабатывал математические основы телефонной системы для междугородных переговоров. Другим примером инженерного решения проблемы управления является создание системы наведения орудия, выполненное Дэвидом Б. Паркинсоном из «Белл Телефон Лабораториз». Весной 1940 г. 29-летний инженер Паркинсон занимался модернизацией автоматического самопишущего прибора, предназначенного для регистрации на диаграммной бумажной ленте изменяющегося напряжения. Самым капризным элементом в приборе был маленький потенциометр, с помощью которого через исполнительный механизм производилось управление перемещением пера самописца. В мыслях у Паркинсона было орудие, которое чувствовало бы приближение самолета и уничтожало его. Вот что описывает Паркинсон: После трех или четырех выстрелов один из членов орудийного расчета улыбнулся и попросил меня подойти поближе. Когда я это сделал, он указал мне на левую цапфу орудийной турели, и я увидел, что там установлен такой же потенциометр, что и в моём самописце! На следующее утро Паркинсон воплотил свои мечты в реальность: Если мой потенциометр был способен управлять перемещением пера самописца, то нечто похожее могло бы, с соответствующими техническими изменениями, управлять наводкой зенитного орудия. После напряженной работы в этом направлении вооруженным силам США 1 декабря 1941 г. была предложена инженерная модель соответствующего устройства. В начале 1943 г. было налажено промышленное производство подобных систем, и на вооружение было принято около 3000 систем орудийной наводки. На вход регулятора поступал сигнал от радиолокатора о текущем положении самолета, а в системе управления вычислялось его будущее положение. Управление на практике Современная теория управления имеет дело с системами, которые обладают качествами самоорганизации, приспосабливаемое™, робастности, обучаемости и оптимальности. Эти признаки постоянно поддерживают творческую инициативу инженеров, работающих в сфере автоматического управления. Управление производственным процессом без непосредственного участия человека обычно называется автоматизацией. Среди прочих отраслей промышленности автоматизация преобладает в химической технологии, энергетике, в производстве стали, бумаги, автомобилей. Автоматизация играет ключевую роль в нашем индустриальном обществе. Различные автоматические устройства позволяют увеличить выпуск продукции в расчете на одного работающего, чтобы сбалансировать инфляционные издержки и рост заработной платы. Поэтому в промышленности используется термин производительность (в первую очередь — производительность труда), которая определяется как отношение выпуска продукции к реальным затратам в расчете на один час рабочего времени. Кроме того, промышленные предприятия стремятся постоянно улучшать потребительские качества выпускаемой продукции. За последнее десятилетие это наиболее заметно проявилось в автомобильной промышленности. За сравнительно короткую историю Соединенных Штатов механизация и автоматизация резко изменили структуру рабочей силы, в результате страна из аграрной республики превратилась в мощную индустриальную державу. В 1820 г. более 70% рабочей силы было занято в сельском хозяйстве. К 1900 г. эта цифра составила уже менее 40%, а в настоящее время она меньше 5%. В 1925 г. почти 558000 человек — около 1,3% всей рабочей силы страны — требовалось для добычи 520 млн т каменного и бурого угля, причем практически полностью из подземных разработок. К 1980 г. добыча угля выросла до 774 млн т, но количество рабочих при этом уменьшилось до 208000. Более того, только 136000 человек из общего количества было занято на подземных работах. Что же касается открытых разработок, то благодаря высокой степени механизации всего 72000 рабочих обеспечили добычу 482 млн т, или 62% от общего объема. Процесс облегчения труда человека за счет технических достижений, начавшийся еще в доисторическую эпоху, вступает в новую фазу. Ускорение темпов технических нововведений, начавшееся с Промышленной Революции, до недавних пор сводилось главным образом к устранению физического труда из производственных процессов. В наши дни выдающиеся достижения в компьютерной технологии вызывают не менее важные социальные изменения: по способности собирать и обрабатывать информацию компьютеры всё больше приближаются к человеческому мозгу. Автоматизация позволяет увеличить производительность и повысить качество выпускаемой продукции. Термин автоматизация впервые стал популярен в автомобильной промышленности. Полностью автоматизированные станки были связаны с помощью конвейера в длинную линию, способную производить детали двигателя, например, такие как блок цилиндров, без вмешательства оператора. При производстве кузовов высокоскоростные штамповочные прессы были связаны автоматическими подающими механизмами, что позволило повысить производительность формовки металлических листов. На многих других операциях, где процесс отличался достаточной стабильностью, например при изготовлении радиаторов, ручную работу заменили полностью автоматизированные линии. В 90-е годы возникла потребность в производстве мелких партий заказных изделий, а это стимулировало создание гибких автоматизированных систем и промышленных роботов. В США, Японии и Европе в сфере автоматического управления занято около 150000 инженеров. Только в США за счет автоматизации извлекается доход более 50 млрд. долларов в год! Теория и практика автоматического управления — это многогранная, увлекательная и чрезвычайно полезная инженерная дисциплина, и каждый может легко осознать необходимость ее изучения. Примеры современных систем управления Управление с использованием обратной связи—это неоспоримый факт нашей повседневной жизни. Управлять автомобилем очень приятно, когда машина мгновенно реагирует на действия водителя. Многие автомобили с этой целью оснащены гидроусилителями руля и тормозов. Простая блок-схема системы управления движением автомобиля изображена на рис. 1.8 (а). Желаемое направление движения сравнивается с результатом измерения действительного направления и в итоге образуется ошибка, как показано на рис. 1.8 (б). Информация о действительном направлении поставляется за счет визуальной и тактильной (телодвижение) обратной связи. Дополнительная обратная связь образуется ощущением рулевого колеса руками водителя (датчиком). Эта система с обратной связью является аналогом хорошо известных систем управления курсом океанского лайнера или большого пассажирского самолета. На рис. 1.8 (в) изображена типичная реакция автомобиля на действия водителя. Системы управления функционируют по замкнутому циклу, как показано на рис. 1.9. Если датчик является точным, то измеренное значение выхода системы равно его действительному значению. Разность между желаемым и действительным значениями выходной переменной, т. е. ошибка, поступает на управляющее устройство (например, усилитель). С его выхода сигнал поступает на исполнительное устройство, которое воздействует на объект управления таким образом, чтобы уменьшить ошибку. Например, если корабль пытается отклониться от курса вправо, руль приводится в движение так, чтобы повернуть корабль влево. Система на рис. 1.9 — это система с отрицательной обратной связью, т. к. выходной сигнал вычитается из входного, а разность подается на вход усилителя. На рис. 1.10 изображена замкнутая система ручного управления уровнем жидкости в баке. Входом является заданное значение уровня жидкости, который оператор обязан поддерживать (это значение он держит в памяти). В качестве усилителя выступает сам оператор, а датчиком являются его глаза. Оператор сравнивает действительное значение уровня с желаемым и открывает или закрывает вентиль, изменяя тем самым в нужном направлении отток жидкости. Многие другие хорошо знакомые системы управления состоят из тех же основных элементов, которые показаны на рис. 1.9. Так, бытовой холодильник имеет устройство задания желаемой температуры, термометрический датчик, определяющий действительное значение температуры и величину ошибки, и компрессор, играющий роль усилителя мощности. Другими примерами могут служить духовой шкаф, электропечь, водяной нагреватель. В промышленности повсеместно используются системы управления скоро-
стью, температурой, давлением, положением, толщиной, составом вещества, качество\ изделий. На современном этапе автоматизацию можно определить как технологию, использу ющую запрограммированные команды, воздействующие на некоторый объект или про> цесс, и обратную связь, с помощью которой определяется, правильно ли исполнены эй команды. Автоматизация часто применяется к процессам, в управлении которыми ране< участвовал человек. После автоматизации процесс может функционировать без помоии или вмешательства человека. Фактически, большинство автоматизированных систем спо собны выполнять свои функции с большей точностью и намного быстрее, чем это былс при ручном управлении. Встречаются и частично автоматизированные процессы, J управлении которыми участвуют и люди, и роботы. Например, многие работы на линш сборки автомобилей требуют совместных действий человека-оператора и интеллектуаль ного робота. Робот — это управляемая компьютером машина, функционирующая фактически н; тех же принципах, которые используются в системах автоматизации. Робототехнию можно определить как отдельную ветвь автоматизации, в которой проектируются автома тические машины (т. е. роботы), призванные заменить труд человека. Поэтому роботы об ладают определенными характеристиками, присущими человеку. Примером может слу жить механический манипулятор, воспроизводящий движения человеческой руки и кис ти. Отметим, что некоторые задачи автоматическая машина выполняет лучше человека тогда как с другими лучше справляется человек. Это отражено в табл. 1.2. Таблица 1.2. Трудность задач для человека и автомата
Еще одной практически важной задачей является управление современным автомобилем. Уже разработаны и внедряются системы управления подвеской, рулевым механизмом и двигателем. Новые автомобили оснащаются также системами привода на все четыре колеса и системами, препятствующими заносу.
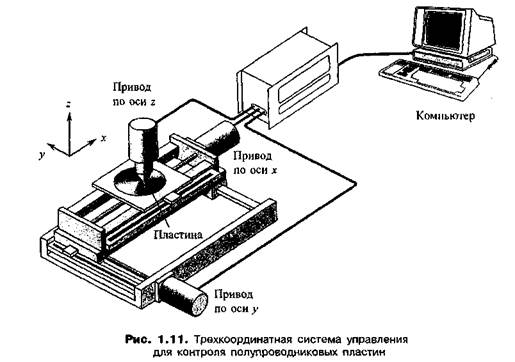
На рис. 1.11 изображена трёхкоординатная система управления для контроля отдельных полупроводниковых пластин. Для перемещения элементов установки в заданное положение по всем трем осям используются соответственно три электродвигателя. Система предназначена для обеспечения плавного и точного перемещения по каждой оси. Она выполняет очень ответственные функции в производстве полупроводниковых приборов. Не так давно разгорелась серьезная дискуссия по поводу разрыва между теорией и практикой управления. Совершенно естественно, однако, что во многих областях деятельности теория опережает ее практические применения. Тем не менее, интересно, что в электроэнергетике — крупнейшей отрасли США — этот разрыв не столь значителен. Эта отрасль главным образом связана с преобразованием, контролем и распределением энергии. Поэтому естественно, что для повышения эффективности использования энергетических ресурсов всё шире внедряются компьютерные системы управления. Кроме того, особую важность приобретает задача управления электростанциями с целью уменьшения выбросов в окружающую среду. В современных крупных электростанциях, мощность которых превышает сотни мегаватт, системы автоматического управления крайне необходимы для поддержания такого соотношения между отдельными переменными, при котором оптимизируется процесс производства энергии. Обычно скоординированное управление производится более чем 90 переменными. На рис 1.12 показана упрощенная схема системы управления важнейшими переменными крупного парогенератора. Этот пример показывает важность измерения многих переменных, таких как давление и содержание кислорода, что дает компьютеру информацию для вычисления управляющих воздействий. По оценочным данным, в США функционируют более 400000 цифровых систем управления.
Рис. 1.12. Скоординированная система управления режимом парогенератора На рис. 1.13 приведена блок-схема цифровой системы управления, в которой роль управляющего устройства выполняет компьютер. Именно в электроэнергетике находят практическое применение все новейшие достижения в технике управления. По-видимому, основным фак
|
||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-20; просмотров: 1003; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.152 (0.023 с.) |