Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип действия и система управленияСодержание книги
Поиск на нашем сайте
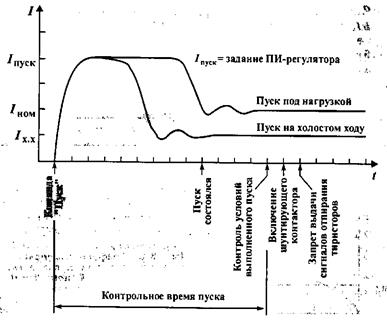
Устройство плавного пуска и торможения (софтстартер) является электронным устройством, с помощью которого регулируется напряжение на зажимах статора двигателя. Микроконтроллер - «сердце» УППТ, управляет отпиранием тиристоров, работой встроенных в УППТ реле, выполняет функции программной защиты и контроля как самого УППТ, так и двигателя. Блок ФИ подает на тиристоры отпирающие импульсы в моменты, сдвинутые на изменяемый угол Пусковое устройство располагает двумя конфигурируемыми дискретными выходами LOl и L02, позволяющими передавать следующую информацию о состояниях или событиях: сигнализация о перегреве двигателя, двигатель запитан, сигнализация перегрузки двигателя, сигнализация недогрузки двигателя, сигнализация состояния терморезисторов тепловой защиты двигателя, второй комплект параметров двигателя активен. Пусковое устройство содержит три встроенных реле, из которых два конфигурируемые. Реле окончания пуска R2 (неконфигурируемое), оно служит для управления шунтирующим контактором. Реле активизируется после окончания пуска и выключается по команде останова, а также при неисправностях. В этом случае УППТ отрабатывает команду торможения или замедления. Реле R1 может быть сконфигурировано в качестве:
Реле R3 конфигурируется для сигнализации о тех же состояниях и событиях, что и дискретные выходы L03 и L02. Аналоговый выход AOl позволяет отображать следующие величины: ток, потребляемый двигателями от сети; момент на валу двигателя; тепловое состояние двигателя; коэффициент мощности
Пульт управления УППТ обеспечивает возможность выбора языка и ведения диалога на английском, немецком, итальянском и испанском языках (УППТ компании «Schneider Electric»).
ДИАГРАММА ИЗМЕНЕНИЯ НАПРЯЖЕНИЯ НА ЗАЖИМАХ СТАТОРА ДВИГАТЕЛЯ. ОСНОВНЫЕ СПОСОБЫ УПРАВЛЕНИЯ
Устройство плавного пуска осуществляет пуск электродвигателя плавным нарастанием напряжения на статоре при одновременном регулировании тока или момента двигателя. Преимуществом УППТ по сравнению с традиционными способами пуска является предоставление пользователю широких возможностей программными средствами осуществлять настройку устройства для конкретного применения. Эти возможности обеспечиваются широким диапазоном изменения параметров диаграммы изменения напряжения на зажимах статора двигателя и выбором способа управления. Диаграмма изменения во времени напряжения на зажимах статора двигателя, реализуемая большей частью УППТ, изображена на рис. 13.
Рис. 13. Диаграмма изменения напряжения на зажимах статора двигателя, реализуемая устройством плавного пуска Приведем параметры пусковой диаграммы изменения напряжения, реализуемой УППТ концерна ABB. Первоначальная уставка пускового начального напряжения В случае снижения нагрузки на валу АД УППТ автоматически снижает напряжение на зажимах статора АД до значения 0,6
В УППТ могут быть реализованы следующие способы управления: напряжением на зажимах статора, током двигателя, моментом двигателя. Управление напряжением обеспечивает плавный пуск двигателя, однако ток и момент двигателя при пуске не контролируются. Поскольку отсутствуют обратная связь по току и контроль момента двигателя, при пуске возможны броски тока (рис. 14, а). Данный способ управления не пригоден для электроприводов с тяжелым пуском. Управление током обеспечивает при пуске ограничение пускового тока. Изменение напряжения на зажимах статора происходит таким образом, что в течение большей части времени пуска ток двигателя поддерживается постоянным (рис. 14, б). Уровень ограничения пускового тока является основным параметром пуска и устанавливается пользователем в зависимости от конкретного применения.
Рис. 14. Графики изменения во времени тока при пуске электродвигателя от УППТ при способах управления: а — напряжением на зажимах статора; б — током; в — моментом двигателя; Осциллограмма пускового тока двигателя, управляемого от устройства плавного пуска при управлении током, показана на рис. 15.
Рис. 15. Осциллограмма пускового тока двигателя, управляемого от устройства плавного пуска при управлении током
Управление моментом является наиболее совершенным способом пуска. В этом случае УППТ следит за требуемым значением момента, обеспечивая пуск с минимальным значением тока. Применение системы управления с контролем момента двигателя обеспечивает линейный график изменения скорости во времени, т.е. пуск при постоянном ускорении. В некоторых УППТ возможна реализация специальной функции управления насосом. График изменения во времени тока для такого управления показан на рис. 14, в. В случае пробоя тиристора предусмотрена функция аварийного прямого пуска двигателя, которая доступна только при управлении напряжением. При аварийном пуске управление С помощью УППТ могут быть реализованы следующие способы торможения двигателя:
Для предохранения двигателя от замерзания и перепадов температуры, что может привести к образованию конденсата и вследствие этого к увлажнению изоляции, предусмотрен предварительный обогрев двигателя. При этом в обмотку статора заторможенного двигателя подается небольшой ток. Значение тока и время подогрева настраиваются программными средствами. При предварительном подогреве двигателя защита от тепловой перегрузки блокируется.
|
||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 400; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.226.163.23 (0.029 с.) |

 относительно момента естественной коммутации, благодаря чему напряжение на выходе УППТ изменяется от
относительно момента естественной коммутации, благодаря чему напряжение на выходе УППТ изменяется от  при
при  теоретически до нуля (
теоретически до нуля ( °). Запирание тиристоров происходит естественно — при изменении полярности напряжения на его зажимах анод-катод.
°). Запирание тиристоров происходит естественно — при изменении полярности напряжения на его зажимах анод-катод. ; активную мощность и др. По умолчанию АО настроен на отображение тока АД. Выходной аналоговый сигнал может быть представлен в четырех вариантах: 0—10 В, 2-10 В, 0-20 мА, 4-20 мА.
; активную мощность и др. По умолчанию АО настроен на отображение тока АД. Выходной аналоговый сигнал может быть представлен в четырех вариантах: 0—10 В, 2-10 В, 0-20 мА, 4-20 мА.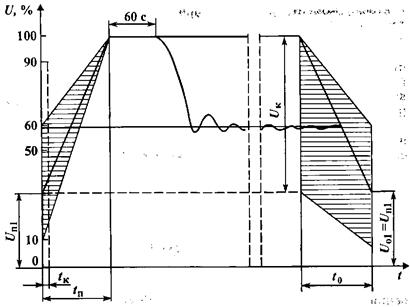
 может варьироваться в пределах 10-60 % от номинального значения, что обеспечивает необходимый уровень пускового момента АД. Если при пуске АД требуется создать увеличенный пусковой момент для преодоления момента сопротивления, обусловленного силами трения покоя, то возможно кратковременное в течение времени
может варьироваться в пределах 10-60 % от номинального значения, что обеспечивает необходимый уровень пускового момента АД. Если при пуске АД требуется создать увеличенный пусковой момент для преодоления момента сопротивления, обусловленного силами трения покоя, то возможно кратковременное в течение времени  = 0,5 с приложение к статору импульса напряжения с амплитудой 90 % от
= 0,5 с приложение к статору импульса напряжения с амплитудой 90 % от  . Продолжительность пуска
. Продолжительность пуска  может варьироваться в пределах от 0,5 до 60 с, а продолжительность торможения
может варьироваться в пределах от 0,5 до 60 с, а продолжительность торможения  — от 0 до 240 с. Пусковой ток АД может устанавливаться в пределах (2 – 5)
— от 0 до 240 с. Пусковой ток АД может устанавливаться в пределах (2 – 5)  , а диапазон изменения конечного напряжения
, а диапазон изменения конечного напряжения  — 30—100 % от
— 30—100 % от 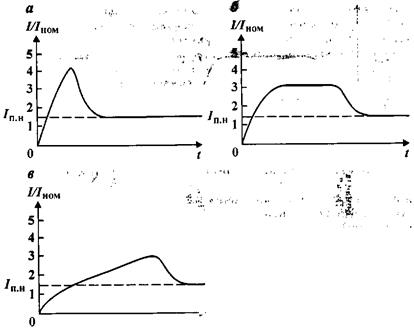
 — ток полной нагрузки
— ток полной нагрузки