Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Програмне забезпечення. Централізоване керуванняСодержание книги
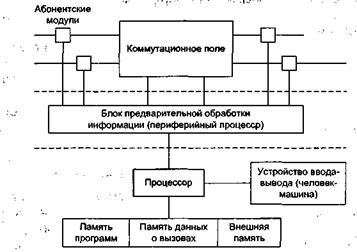
Поиск на нашем сайте Программное обеспечение коммутационных узлов и станций Приведенный в эпиграфе ответ Евклида справедлив по отношению не только к геометрии, но и к программному обеспечению (ПО) узлов коммутации, изучение которого требует сложных и глубоких курсов гораздо большего объема, чем может вместить одна глава учебника. К тому же, на ПО приходится более 80% стоимости разработки современной АТС, и оно практически полностью определяет ее функциональные возможности. Вот почему эта глава оказалась для автора самой сложной с точки зрения того, как ее построить. В результате получилась такая структура: следующий параграф посвящен аппаратной поддержке ПО узла коммутации и анализу разных вариантов ее архитектуры; далее рассмотрены основы программирования задач обслуживания вызовов в реальном времени, элементы алгоритмического обеспечения на языках SDL и MSC и качественные характеристики ПО. Вместе с тем, в этом подходе к структуре главы учитывается то обстоятельство, что современные средства программного управления коммутацией подразделяются даже не на два, а на три уровня. Самый нижний уровень ПО обычно встраивается в абонентские и линейные комплекты и другие модули станции. Программные средства на этом уровне, как правило, зависимы от аппаратных средств и в англоязычной литературе называются middleware, что подчеркивает их промежуточное положение между аппаратными средствами hardware и основным программным обеспечением software. Реализуемые здесь функции связаны, в основном, с контроллерами линейных и станционных интерфейсов и с поддержкой нижнего уровня обработки вызова. Например, когда абонент поднимает трубку, первый уровень управления абонентским модулем детектирует состояние снятия трубки (off hook) и запрашивает у контроллера второго уровня информацию о данной абонентской линии, классе ее обслуживания, возможностях абонентского терминала, каких-либо ограничениях. Затем первый уровень обеспечивает посылку абоненту сигнала ответа станции. После набора номера накопленные первым уровнем цифры передаются выше. Второй уровень управления обычно реализуют процессоры управления коммутацией с распределенными функциями, взаимодействующие друг с другом через коммутационное поле или через общую шину. Для межпроцессорных связей используют разнообразные протоколы, причем в большинстве цифровых АТС применяются модификации стандартных протоколов ОКС7 или Х.25. Основные процессоры управления коммутационным полем для надежности дублируются. На этом уровне анализируются набранные абонентом цифры и выбирается путь через коммутационное поле. После того как соединение установлено, второй уровень управления поддерживает его и разрушает, как только обслуживание вызова переходит в фазу разъединения. Третий уровень управления обычно бывает связан с центральным процессором цифровой АТС, выполняющим функции технического обслуживания, конфигурации, администрирования, статистики и начисления платы. Раньше на этом уровне применяли мэйнфреймы, в которые встраивались базовые управляющие функции цифровой системы коммутации, но программное обеспечение АТС более поздних типов тяготеет к полностью распределенной архитектуре и предоставляет больше автономии двум первым уровням управления. Рассмотрим эти варианты архитектуры несколько подробнее. Управляющие устройства Описанию различных вариантов организации устройств программного управления коммутацией в недавнем прошлом было посвящено немало публикаций, объем которых постепенно уменьшался по мере качественного изменения самих этих устройств в полном соответствии с законом Мура. Описываемое этим законом снижение стоимости микропроцессорных управляющих устройств одновременно с радикальным увеличением их производительности тютаситю 'оьшые споры между сторонниками централизованной \л распределенной архитектур программного управления и привело ктому, что в большинстве современных цифровых АТС используется архитектура, представляющая собой что-то среднее между двумя названными подходами. Сегодняшние варианты архитектуры управления цифровой коммутацией можно разделить на три типа: централизованное управление, иерархическое управление и распределенное управление. Централизованное управление Архитектура централизованного управления условно изображена на рис. 9.1. Эта архитектура восходит к началу сорокалетней истории развития электронных узлов коммутации, управляемых ЭВМ, которая началась в ноябре 1960 года в г. Морис (штат Иллинойс, США) испытаниями прототипа электронной АТС. В 1965 году в г. Саккасана (Нью-Джерси, США) была сдана в эксплуатацию серийная электронная система коммутации ESS-1 с управлением по записанной программе, базирующаяся исключительно на центральном процессоре, который управляет всеми функциями системы. Отечественный ИВТУ, рассмотренный в главе 6, полностью соответствует структуре, показанной на рис. 9.1.
Рис. 9.1. Структура АТС с централизованным Программным управлением Централизованное программное управление этих АТС предусматривает выполнение следующих трех групп функций: • управление обслуживанием вызова, включая анализ имеющейся в базе данных информации, относящейся к вызываемому абоненту, прием набираемого номера, контроль процесса обслуживания вызова во всех фазах этого процесса, включая фазы отбоя и разъединения; управление коммутацией, для чего в зависимости от структуры АТС используются разные методы, но в любом случае центральный процессор хранит отображение всех путей (и свободных, и используемых), находит и резервирует путь для запрашиваемого абонентским или линейным модулем соединения; • контроль, диагностика неисправностей и восстановление рабочей конфигурации системы, что обсуждается в следующей главе. Здесь отметим лишь, что при централизованном управлении центральный процессор управляет, наряду с коммутацией, и функциями технического обслуживания, административного управления, контроля, диагностики и восстановления системы, для чего он должен обладать достаточной вычислительной мощностью.
|
||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 396; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.33 (0.008 с.) |