Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поток освобождений серверов.Содержание книги
Поиск на нашем сайте
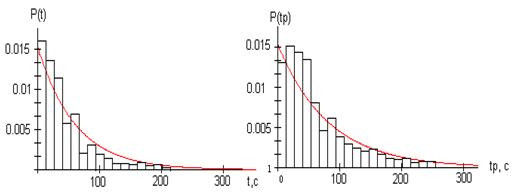
Рис. 1.4, на котором показаны результаты экспериментального измерения времени занятия абонентской линии на АТС подтверждает практическую приемлемость такой аппроксимации.
Рис. 1.4. Гистограммы измерений длительности занятий при x = 60,3 с, s = 84,4 и разговоров при x = 81,2 с, s = 90,1 Если освободившийся сервер сразу же занимается новым обслуживанием, то отношение
В более общем случае, когда занято k серверов, вероятность освобождения i серверов за время t при показательном законе распределения времени обслуживания получим
Вероятность того, что не освободится ни один сервер: Параметр потока освобождений при занятии k серверов можно найти как предел
Поток освобождений ординарный и его параметр пропорционален числу занятых серверов. Коэффициент пропорциональности – величина обратная среднему времени обслуживания.
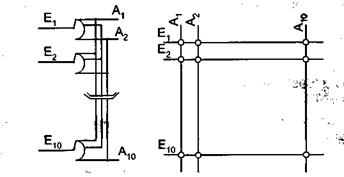
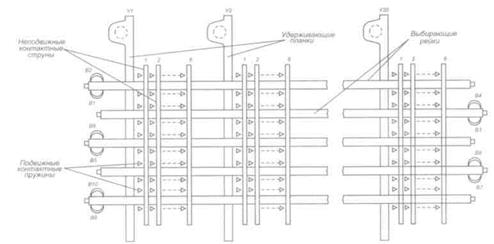
Координатні з’єднувачі. Координатні АТС Координатные соединители Еще в 1900 г. Бетуландер и Пальмгрен в Швеции начали работать над заменой искателя Строуджера. В 1905 г. соотечественник Бетуландера и Пальмгрена Эриксон предложил создать на основе релейных схем так называемые координатные поля - идея, далеко опередившая свое время. Хотя эти работы непосредственного практического выхода не имели, можно считать, что именно они легли в основу современных координатных АТС. Идею построения коммутационного прибора с релейными контактами, которые замыкаются с помощью координатных реек, предложил также Рейнольде в США в 1914 г. В 1919 г. фирма «Бетуландер компани» уже смогла построить несколько небольших экспериментальных координатных станций, хорошо зарекомендовавших себя в работе. А по случаю 300-летия города Гетеборга, которое праздновалось в 1923 г., там была открыта первая современная координатная АТС. Поэтому именно 1923 г. считается годом ввода в действие техники координатной коммутации. С 1930 г. на основе этой техники в Швеции стали строиться центральные АТС. После того как в Мальме была построена АТС на 40000 номеров, началось триумфальное шествие координатных станций по всему миру. Успехи шведов побудили фирму «Белл телефон компани» начать собственные разработки, и в 1938 г. первая координатная АТС вступила в строй в США. В начале 40-х годов шведский «Эриксон» приступил к разработке и производству координатных АТС разных типов для городской, междугородной и сельской связи (ARF-50,ARM-20nflp.). После второй мировой войны техника координатной коммутации получила повсеместное распространение. В 1950 г. она вводится в Финляндии, в 1952 г. - в Голландии, в 1955 г. - в Бразилии, с этого же года она распространяется в странах Азии и в Австралии. В 50-х г. координатные АТС были созданы во Франции (Пентаконта) и в Англии (5005). В 60-х годах были разработаны городские координатные АТС в Чехословакии (РК-20) и ГДР (АТС-65). В Советском Союзе разработка координатных АТС разного назначения была начата в первой половине 50-х годов. В 1956 г. было организовано производство городских координатных подстанций на сто номеров ПС-МКС-100, а в последовавшие годы были разработаны сельские координатные АТС малой и средней емкости К-40/80, К-100/2000. Стала также выпускаться модификация АТС типа К-100/2000 для учрежденческой связи. В середине 60-х годов завершилось создание координатной станции типа АТСК для городских телефонных сетей. С целью уменьшения затрат на абонентские линейные сооружения ЛОНИИС совместно с заводом «Тесла-Карлин» (Чехословакия) была разработана городская координатная подстанция на 1000 номеров ПСК-1000, которая успешно использовалась и еще сегодня используется во многих ГТС. Для междугородной телефонной связи выпускались координатные АМТС-2 и АМТС-3. Дальнейшее усовершенствование городских и сельских координатных АТС с целью повысить надежность коммутационной аппаратуры, увеличить пропускную способность АТС, уменьшить стоимость оборудования и снабдить его комплексом контрольно-проверочных устройств привело к созданию станций АТСК-У и АТСК-50/200М. В этой главе будут рассмотрены применяемые сегодня в ВСС РФ координатные АТС, предназначенные для городской, сельской и учрежденческой связи. Но прежде посмотрим, что же представляют собой коммутационные приборы координатного типа и как они работают. Так как координатные соединители рассматриваются здесь после декадно-шаговых искателей, воспользуемся следующим, часто приводимым примером. Пусть десять выходов десяти вращательных искателей многократно соединены между собой, как это показано на рис. 3.1 слева. Такая схема позволяет каждому из десяти входов получить соединение с каждым из десяти выходов, разумеется, если тот свободен. Аналогичная по возможностям схема координатного соединителя 10x10 показана на рис. 3.1 справа. Самая простая техническая реализация такой модели - включить по одному реле в каждую точку пересечения «горизонталей» и «вертикалей». Но тогда соединитель 10x10 будет содержать сто реле, а значит - сто электромагнитов, сто якорей и сто комплектов контактных пружин. Рис. 3.1. Модель координатного соединителя 10x10 Нашлось, однако, более остроумное решение - заменить сто электромагнитов двадцатью (10- для горизонтальных линеек координатного поля и 10 - для вертикальных) и применить такую конструкцию соединителя, в которой для выбора любого выхода используются два электромагнита (один - по горизонтали, второй - по вертикали), а для удержания полученного соединения служит только второй из них. В этой конструкции с десятью электромагнитами, называемыми выбирающими, связано 5 горизонтальных реек (по одной рейке на каждую пару магнитов). При срабатывании того или другого из пары выбирающих электромагнитов связанная с ними рейка поворачивается на небольшой угол в ту или в другую сторону (кстати, именно эти горизонтальные рейки привели к английскому названию координатного соединителя - crossbar). На каждой рейке имеется 10 упругих выбирающих пальцев, которые в состоянии покоя находятся между группами контактных пружин, расположенными в соседних горизонтальных рядах. Один палец обслуживает две контактные группы; так что каждая рейка обслуживает 20 контактных групп (соответственно, 5 реек обслуживают 100 контактных групп). Если срабатывает нижний выбирающий электромагнит, то связанная с ним горизонтальная рейка сдвигает 10 выбирающих пальцев к 10-ти контактным группам, находящимся выше рейки; если же срабатывает верхний выбирающий электромагнит, то рейка сдвигает пальцы к 10-ти нижним группам контактов. С каждой из 10-ти вертикальных планок жестко связан один из 10-ти удерживающих электромагнитов. При срабатывании удерживающего электромагнита связанная с ним планка поворачивается вокруг своей вертикальной оси и сдвигает в горизонтальном направлении все пять выбирающих пальцев, обслуживающих контактные группы данной вертикали. Существенно, что только тот палец, который был перемещен выбирающим электромагнитом, пока еще продолжающим удерживать свой якорь, сдвигаясь при повороте вертикальной планки, воздействует на опору, производящую включение контактов выбранной таким образом контактной группы, и ос-тается плотно прижатым к этой опоре. Воздействие вертикальной планки на другие пальцы не влияет на состояние контактных групп и на работу соединителя. Теперь горизонтальная рейка может быть возвращена в нейтральное положение - должен отпустить свой якорь связанный с ней выбирающий электромагнит. Удерживающий электромагнит остается в работе до окончания соединения. Все ли вам ясно? Повторим теперь это снова в сжатом виде: срабатывает выбирающий электромагнит - выбирающие пальцы «выбирают» один из 10 горизонтальных рядов контактных групп; срабатывает удерживающий электромагнит - замыкаются контакты в выбранной точке пересечения горизонталей и вертикалей, и планка, связанная с якорем удерживающего электромагнита, плотно зажимает выбирающий палец, благодаря чему замыкается соответствующая группа контактов; отключается выбирающий электромагнит - горизонтальная рейка, возвратившись в нейтральное положение, готова для перемещения остальных пальцев; только когда контакты в точке пересечения нужно разомкнуть, выключается цепь удерживающего электромагнита, и использовавшийся выбирающий палец освобождается. Таким образом, в координатном соединителе одновременно может существовать множество соединений, но они должны устанавливаться по очереди и под контролем специального устройства - маркера, который управляет электромагнитами, создающими очередное соединение. Поэтому, в отличие от АТС, построенных на декадно-шаговых искателях с прямым установлением соединений, которые сами обрабатывают импульсы набора, поступающие от абонента, в координатных АТС используется обходное установление соединений, о чем еще будет сказано в следующем параграфе. Применяемые в отечественных координатных АТС коммутационные устройства называются многократными координатными соединителями (МКС). Контактное поле МКС состоит из групп контактных пружин релейного типа с контактами на замыкание. В ряде конструкций МКС вместо неподвижных контактных пружин применяются общие струны, с которыми образуют контакт подвижные пружины. Известно несколько разновидностей МКС, различающихся конструкцией, количеством горизонталей и вертикалей, объединенных общей системой привода, и некоторыми другими признаками. Два наиболее распространенных типа МКС имеют следующие условные обозначения: МКС 20x10x6 и МКС 10x20x6. В таком обозначении первое число указывает количество вертикалей, входящих в состав одного МКС, второе - емкость контактного поля каждой вертикали и третье - проводность, т.е. число проводов, коммутируемых каждой группой контактов. Схема многократного координатного соединителя МКС 20x10x6 изображена на рис. 3.2. Рис. 3.2. Схема многократного координатного соединителя МКС 20x10x6
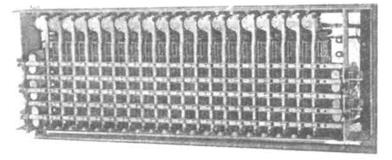
Рис. 3.3. Внешний вид МКС 20x10x6 В соответствии со своим названием этот МКС имеет 20 вертикально расположенных контактных пакетов. В каждом пакете имеется 10 шестиконтактных групп. В этих группах подвижные пружины - индивидуальные, а роль неподвижных пружин исполняют контактные струны, общие для всех 10 групп. Каждому пакету придан удерживающий электромагнит, якорь которого представляет собой одно целое с расположенной вертикально удерживающей планкой. При работе удерживающего электромагнита якорь притягивается, планка поворачивается вокруг своей вертикальной оси и прижимает к опоре контактной группы выбирающий палец, сдвинутый работающим в данный момент выбирающим электромагнитом в сторону этой группы. Пакет контактных групп с удерживающей планкой (якорем) и удерживающим электромагнитом составляют отдельный конструктивный элемент, называемый вертикальным блоком или вертикалью. Внешний вид МКС 20x10x6 представлен на рис. 3.3. Применяются также и МКС других типов, имеющие про-водность от 3 до 12. Различают двухпозиционные и многопозиционные МКС. Число позиций определяется числом электромагнитов, которые должны сработать для выполнения соединения. Например, в двухпози-ционном МКС всякий раз срабатывает два электромагнита (один выбирающий и один удерживающий), в трехпозиционном - три (два выбирающих и один удерживающий) и т.д. Чем больше позиционность МКС, тем эффективнее строится на его основе коммутационное поле (за счет уменьшения проводности увеличивается доступность), но тем сложнее конструкция. Наиболее широко распространены двухпозиционные и трехпозиционгые соединители. МКС получили свое название в связи с многократным использованием каждой из выбирающих реек для организации соединений в разных вертикалях одного МКС. Координатные АТС Рассмотренные в предыдущей главе декадно-шаговые и машинные АТС обладают рядом существенных недостатков, присущих коммутационным станциям со щеточными искателями. Один из них связан с механическими свойствами искателей: для установления соединения с нужной быстротой требуется, чтобы щетки двигались со значительной скоростью, что, в свою очередь, ведёт к поломкам и к нарушениям их регулировки. Другой недостаток, присущий декадно-шаговым и машинным АТС, - низкое качество скользящего контакта щётка - ламель. Дело в том, что в качестве материала для скользящих контактов используются неблагородные металлы, имеющие благодаря своей жёсткости больший срок службы, чем, например, благородный металл серебро. Однако во время работы сопротивление такого контакта изменяется в широких пределах, вследствие чего ухудшается качество разговорного тракта. Все это приводит к невысокой надежности коммутационных приборов, большим затратам труда на обслуживание станционного оборудования, высокому энергопотреблению, низкому качеству разговорного тракта, образованного контактами скольжения, и т.п. В координатных АТС основным коммутационным прибором является многократный координатный соединитель, который лишен перечисленных недостатков. Более того, устройство МКС, принцип его работы и коммутационные возможности совсем не такие, как у коммутационных механизмов других типов. По этой причине скелетное построение координатных АТС, структура ступеней искания и принципы управления коммутацией отличаются от тех, которые типичны для АТС, построенных на шаговых и декадно-шаговых искателях. В структуре ступеней искания используется т.н. звеньевое включение, позволяющее строить многозвенные коммутационные блоки. Итак, в электромеханических АТС могут использоваться два разных принципа установления соединений - прямой и обходный. Прямой принцип характеризуется тем, что приборы, выбирающие нужное направление связи и свободную линию в этом направлении, сами принимают цифры номера, устанавливают на их основе соединение и образуют разговорный тракт. Такой принцип установления соединений используется в большинстве тех АТС, где в качестве основных коммутационных приборов применяются щеточные искатели. В частности, рассмотренные в предыдущей главе декадно-шаговые АТС используют именно этот принцип.
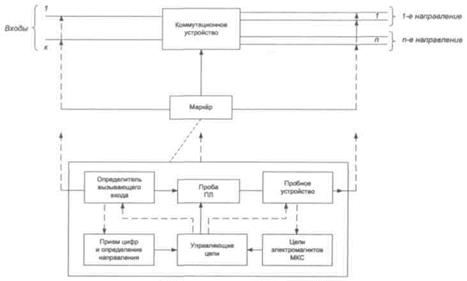
Маркёр Рис. 3.4. Обходный принцип установления соединений Обходный принцип характеризуется тем, что выбор направления связи и поиска свободной линии в этом направлении отделён во времени от процесса соединения входа коммутационного прибора с выходом, в который включена выбранная линия. Сам коммутационный прибор не участвует в выборе направления и в поиске свободной линии. Эти процедуры выполняет некое устройство, как правило, общее для группы приборов (в координатных АТС это - маркер). Оно принимает цифры номера, обрабатывает их, и, в соответствии с результатом обработки, управляет работой коммутационного прибора, воздействуя на его элементы таким образом, чтобы вызывающий вход был соединен с одним из свободных выходов в нужном направлении. Иначе говоря, установление соединений производится в обход коммутационного прибора, в связи с чем такой принцип и назван обходным. Схематично его иллюстрирует рис. 3.4. При установлении каждого соединения маркёр занимается кратковременно и поэтому способен обслужить несколько коммутационных приборов с большим числом входов и выходов. В соответствии с функциями, выполняемыми маркером, его блок-схема, представленная в нижней части рис. 3.4, содержит определитель вызывающего входа, определитель требуемого направления связи, устройство, отмечающее свободные промежуточные линии, через которые вызывающий вход коммутационного прибора может быть подключен к свободному выходу в нужном направлении, пробное устройство для поиска свободного выхода в этом направлении, устройство включения выбирающего и удерживающего электромагнитов МКС, обеспечивающих соединение входа с выходом, и цепи управления работой маркера. Координатные АТС разделяются на АТС с управлением по ступеням искания и на АТС с централизованным управлением. В координатных АТС с управлением по ступеням искания функции этих ступеней те же, что и в большинстве АТС, построенных на щеточных искателях (декадно-шаговых и машинных). В таких координатных АТС предусматривается некоторое количество ступеней группового искания, зависящее от емкости станции и сети, и ступень абонентского искания. Последняя выполняет функции пре-дыскания, обслуживая вызовы, исходящие от абонентов, и функции линейного искания, обслуживая вызовы, входящие к абонентам. Характерной особенностью координатных АТС с управлением по ступеням искания является то, что определение маркером свободного выхода ступени, с которым следует соединить ее вызывающий вход, происходит на каждой ступени без анализа состояния соединительных путей на следующих ступенях искания. Рассмотрим этот вопрос подробнее. Итак, практически во всех координатных АТС применяется обходный способ управления коммутацией. Коммутационные блоки АТС построены на МКС, а в качестве управляющих устройств используются маркеры и, в большинстве случаев, регистры, избавляющие маркеры от функций приема передаваемых медленным способом цифр. Различают четыре вида координатных АТС: с последовательным установлением соединения по ступеням искания и с регистрами для приема цифр, набираемых абонентами (ст.н. абонентскими регистрами); с регистровыми устройствами и маркерами, распределенными по ступеням искания; с абонентскими регистрами и с управлением сразу несколькими ступенями искания; с централизованным управлением без разделения коммутационного оборудования станции на ступени искания.
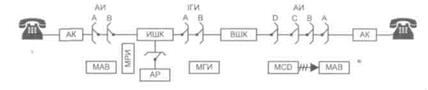
а) с абонентскими регистрами Большинство координатных АТС относится к первому виду. Так, в отечественных станциях АТСК, АТСК-У, К-100/2000 соединения устанавливаются по ступеням искания с использованием абонентских регистров. При этом уменьшается объем регистрового оборудования, и используются сравнительно несложные маркеры. На рис. 3.5, а приведена схема соединительного тракта станции АТСК, которая рассматривается более подробно в следующем параграфе. При установлении соединения выбор линий производится на каждой ступени независимо от возможности их дальнейшего подключения к вызываемой линии.
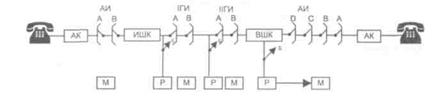
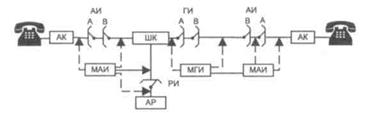
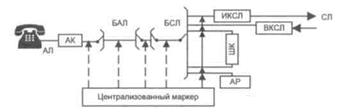
б) с регистрами на ступенях искания Рис. 3.5. Соединительные тракты координатных АТС с управлением по ступеням искания Существуют координатные АТС второго вида, где на ступенях группового и абонентского искания используются регистры, каждый из которых принимает адресную информацию, необходимую для установления соединения лишь через одну ступень искания. К АТС этого типа относятся шведская станция ARF-50, которая нашла применение в отечественных ГТС, и разработанная в ГДР координатная АТС-65. На рис. 3.5, б приведена схема соединительного тракта ARF-50. Соединение на каждой ступени ГИ должно завершиться до начала передачи абонентом цифры, предназначенной для следующей ступени искания. На приведенной схеме регистр ступени ГИ принимает одну цифру, и поэтому число направлений в блоке ГИ равно десяти. Можно предусмотреть прием регистром ГИ также и двух цифр, но с определенной первой цифрой. В системе ARF-50 используются тысячелинейные блоки АИ, и поэтому регистр ступени АИ принимает три последние цифры номера. Преимуществом АТС второго вида является простота связи с декадно-шаговыми АТС, поскольку при входящей связи импуль- сы набора номера непосредственно принимаются регистрами на ступенях искания, а при исходящей связи серии импульсов, поступающих от абонента, транслируются через ИШК и направляются к искателям декадно-шаговой АТС. Координатные АТС с регистрами, распределенными по ступеням искания, близки по своим возможностям к АТС с прямым управлением коммутацией. В координатных АТС третьего вида для внутристанционных соединений предусматривается лишь одна ступень ГИ с двухкаскад-ными или трехкаскадными коммутационными блоками большой емкости (до 1000 исходящих линий). Управляют коммутацией абонентские регистры и маркеры, которые обеспечивают организацию соединения через одну или две ступени искания (рис. 3.6, а). На ступени АИ используются двухкаскадные блоки и для исходящей, и для входящей связи. Каждый коммутационный блок обслуживается, в зависимости от его емкости, одним или двумя маркерами. При исходящей связи маркер блока АИ выполняет функцию подключения линии вызывающего абонента к регистру. При этом маркер производит обусловленное искание через ступени АИ и регистрового искания. После набора номера при внутристанционной связи маркеры ступени ГИ (МГИ) и АИ (МАИ), получив из регистра необходимую адресную информацию, совместно выполняют функции подключения линии вызывающего абонента к вызываемой линии. При установлении соединения на ступени ГИ занимается такая свободная и доступная исходящая линия, которая в блоке АИ имеет доступ к вызываемой абонентской линии через свободную промежуточную линию. Поэтому отпадает необходимость иметь в ступени АИ третий каскад. Такой способ управления применяется в английской АТС типа 5005 А и во французской АТС Пентаконта 1000 В. В координатных АТС четвертого вида коммутационное оборудование не делится на ступени искания, а образует общее коммутационное поле. Централизованные маркеры управляют соединением, производя сквозное обусловленное искание через всю АТС. При этом несколько сокращаются объем коммутационного оборудования и время установления соединения, потому что при обусловленном искании на каждом участке соединительного тракта выбираются только такие пути, по которым можно организовать соединение линий вызывающего и вызываемого абонентов. На рис. 3.6, б показан соединительный тракт координатной АТС «Кроссбар №1» (США), в которой коммутация производится через двухкаскадные блоки абонентских линий (БАЛ) и двухкаскадные блоки соединительных линий (БСЛ) под управлением центрального маркера, взаимодействующего с абонентским регистром. Применение такого вида централизованного управления в координатных АТС создало предпосылки для его использования (уже в качестве основного способа) в первых квазиэлектронных и электронных АТС с программным управлением, которые будут рассматриваться далее.
а) с функциональными маркерами б) с централизованными маркерами Рис. 3.6. Соединительные тракты координатных АТС с централизацией управления Существует много типов координатных АТС как отечественного, так и заграничного производства. АТС разных типов отличаются друг от друга по многим признакам, главными из которых являются конструкция и коммутационные параметры МКС, скелетная схема станции, емкость и группообразование блоков ступеней искания и степень централизации управления коммутационными приборами. Известно несколько типов координатных АТС отечественного производства, из которых будут рассмотрены станции АТСК 100/2000 для учрежденческих и сельских сетей средней емкости, а также станции АТСК и АТСК-У, предназначенные для городских телефонных сетей. Для построения названных АТС используются многократные координатные соединители МКС 20x10x6, МКС 10x20x6, МКС 10x10x12, реле РЭС-14 и РПН, поляризованные реле РП-4 или РП-5, полупроводниковые диоды и триоды, и некоторые вспомогательные элементы. Для электропитания этих АТС служит источник постоянного тока с номинальным напряжением 60 В и с допустимыми колебаниями напряжения в пределах 54 - 72 В.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 397; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.251.130 (0.009 с.) |

 Пусть xk –длительность обслуживания k –ой заявки. При детерминированном характере обслуживания задается набор этих значений. При x = xk время обслуживания постоянно и поток освобождения совпадает по характеристикам с потоком заявок. При случайном характере обслуживания задают вероятность того, что обслуживание займет время меньшее, чем x:
Пусть xk –длительность обслуживания k –ой заявки. При детерминированном характере обслуживания задается набор этих значений. При x = xk время обслуживания постоянно и поток освобождения совпадает по характеристикам с потоком заявок. При случайном характере обслуживания задают вероятность того, что обслуживание займет время меньшее, чем x:  .
.
 , где V – общее число серверов, а
, где V – общее число серверов, а  – среднее время обслуживания. Вероятность того, что за промежуток времени t произойдет i освобождений, будет равна:
– среднее время обслуживания. Вероятность того, что за промежуток времени t произойдет i освобождений, будет равна: .
. .
. .
. .
.