
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электрические машины. Часть 1.Содержание книги
Поиск на нашем сайте
Электрические Машины Часть 1 Методические указания к лабораторным работам по электротехнике для студентов всех специальностей
Нижний Новгород - 2011 УДК 621.311
Электрические машины. Часть 1. Методические указания к лабораторным работам по электротехнике для студентов всех специальностей. – Н. Новгород: ННГАСУ, 2010. – 77 с.
Методические указания предназначены для выполнения лабораторных работ, содержат необходимые теоретические сведения, порядок выполнения лабораторных работ и контрольные вопросы.
Рис. 29, табл. 14, библ. 2.
Составители: Н.М. Плотников, Н.Л. Александрова, Д.Я. Воденисов, В.П. Костров, В.В. Палашов, В.И. Пипин
© Нижегородский государственный архитектурно-строительный университет, 2010 Лабораторная работа №8
Исследование однофазного трансформатора Цель работы: Экспериментально определить параметры однофазного двухобмоточного трансформатора, построить внешнюю характеристику и определить коэффициент полезного действия при резистивной нагрузке.
Общие сведения Трансформатор – это статическое электромагнитное устройство, предназначенное для преобразования переменного напряжения (тока) одной величины в переменное напряжение (ток) другой величины. При этом частота напряжения и тока остаются неизменными. В трансформаторе нет подвижных элементов, поэтому его и называют статическим устройством. В промышленности, в электроэнергетике, в приборах различного назначения, в бытовой технике требуются самые разные трансформаторы, например, для подключения к однофазной сети требуются однофазные трансформаторы, в трехфазных сетях – трехфазные трансформаторы. В системах электроснабжения применяют силовые трехфазные трансформаторы для повышения или понижения напряжения. Большую группу составляют технологические трансформаторы, например, для сварочных работ. Выпускают специальные трансформаторы мощностью преимущественно 10-1000 ВА для блоков питания промышленной и бытовой аппаратуры. Трансформаторы могут работать на разной частоте, в этом случае различают трансформаторы низкочастотные и высокочастотные. Большую группу составляют измерительные трансформаторы (трансформаторы напряжения, трансформаторы тока). Отдельную группу составляют автотрансформаторы, у которых вторичная обмотка является частью первичной. В данной работе рассматривается однофазный низкочастотный трансформатор для включения в сеть частотой 50 Гц.
Коэффициент полезного действия трансформатора Под коэффициентом полезного действия трансформатора η понимается отношение активной мощности нагрузки Р2 к активной мощности, потребляемой из сети, Р1, измеренной в ваттах (Вт):
где β - коэффициент загрузки, равный SHT- номинальная мощность трансформатора (В·А); cosφ2 - коэффициент мощности нагрузки. В общем случае η находят по следующей формуле:
где Рм и Рст – потери в меди обмоток и в сердечнике, определяемые из опытов короткого замыкания и холостого хода. Из анализа данного выражения следует, что коэффициент полезного действия ŋ зависит от коэффициента нагрузки β и коэффициента мощности cosφ2.
Внешняя характеристика трансформатора Под внешней характеристикой трансформатора понимается зависимость напряжения на нагрузке от тока нагрузки U2 =ƒ(I2)
Точка а – режим холостого хода, когда U2=U20 (I2=0); Точка b, когда напряжение U2 и ток I2 равны номинальным (расчетным) значениям.
Соединяя точки а и Допустимое отклонение напряжения на потребителе не должно отличаться более чем на 5%.
Порядок выполнения работы 1. Ознакомиться с контрольно – измерительными приборами и аппаратами, предназначенными для выполнения работы. Технические данные исследуемого трансформатора Sном = 500В·А; U1ном = 120В; U2ном = 12 В 2. Рассчитать номинальные токи трансформатора по следующим формулам: Для первичной обмотки I1ном = Sном/ U1ном (А), Для вторичной обмотки I2ном = Sном/ U2ном (А), 3. Убедиться, что автомат QF4(А4) находится в отключенном состоянии.
Опыт короткого замыкания 4. Собрать схему согласно рис. 4 и предъявить для проверки преподавателю.
Рис. 4. Схема опыта короткого замыкания: Т1 - понижающий трансформатор, Т2 - испытуемый трансформатор.
5. Убедиться, что движок резистора R1 находится в положении «0». 6. Включить автомат QF4(A4) и движком резистора R1 установить такое напряжение U1k, чтобы токи в первичной и вторичной обмотке были равны их номинальным значениям I1k = I1Н, I2k=I2Н 7. Записать показания приборов в таблицу 1.
Таблица 1.
8. Показать результаты измерений преподавателю. 9. Выключить автомат QF4(A4). 10. Разобрать схему.
Опыт холостого хода Собрать схему согласно рис. 5 и предъявить для проверки преподавателю.
Рис. 5. Схема опыта холостого хода и исследования трансформатора под нагрузкой.
Убедиться, что рубильник S разомкнут. Включить автомат QF4(A4). Снять показания приборов и записать в таблицу 2.
Таблица 2.
Отключить автомат QF4(A4). Показать результаты измерений преподавателю. Формулы для расчета параметров опыта холостого хода: – полное сопротивление – активное сопротивление первичной обмотки в режиме х.х. – индуктивное сопротивление – коэффициент мощности – коэффициент трансформации
Нагрузочный режим Включить автомат QF4(A4). Включить нагрузку RН во вторичную цепь трансформатора рубильником S (нагрузка активная – рис. 5). Снять показания приборов и записать в таблицу 3.
Таблица 3.
Формулы для расчета нагрузочного режима: – мощность нагрузки – коэффициент нагрузки – коэффициент полезного действия
Обработка результатов 1. Вычислить все величины, входящие в табл. 1-3. 2. Построить внешнюю характеристику трансформатора 3. Рассчитать и построить характеристику η=ƒ Коэффициент полезного действия трансформатора может быть определен по формуле:
где Р2Н - отдаваемая трансформатором мощность при номинальной нагрузке; Рст и Рм - потери в стали и меди соответственно;
Потери в стали зависят только от величины магнитного потока в сердечнике и при постоянстве напряжения, подводимого к трансформатору, остаются неизменными при изменении нагрузки. Потери в меди пропорциональны квадрату тока нагрузки и, следовательно, квадрату коэффициента β. Расчет КПД при разных нагрузках приводится в форме табл. 4 для указанных в таблице значений β. Таблица 4.
По данным табл. 4 в одних осях координат построить характеристики: – потери в меди – потери в стали Рст (не зависят от нагрузки, на графике представляют линию, параллельную оси абсцисс); – полные потери – η=ƒ Сделать вывод, при какой загрузке трансформатора коэффициент полезного действия максимален.
Контрольные вопросы 1. Назначение, конструкция и принцип действия трансформатора. 2. Что такое коэффициент трансформации? 3. От чего зависят электрические и магнитные потери в трансформаторе? 4. Для чего магнитопровод трансформатора выполняют из отдельных листов электротехнической стали?
Лабораторная работа №2
Общие положения Электродвигатель – электрическая машина, предназначенная для преобразования электрической энергии в механическую. Электродвигатель – это основной привод производственных механизмов. Механическая работа совершается за счёт преобразования электромагнитного момента М, который уравновешивает момент сопротивления МС производственного механизма (в статическом режиме М=МС) Трёхфазный асинхронный двигатель (АД) состоит из неподвижного статора и вращающегося ротора. На статоре расположена симметричная трёхфазная обмотка, состоящая из трёх фазных обмоток, расположенных в пространстве одна относительно другой на 1200 . Фазные обмотки статора могут соединяться звездой или треугольником. Обмотка статора включается в трёхфазную сеть переменного тока. Ротор асинхронного двигателя с короткозамкнутым ротором выполнен в виде вращающейся беличьей клетки («беличье колесо»). Его токопроводящая часть (вид обмотки) состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов. Принципиальная схема асинхронного двигателя с короткозамкнутым ротором при соединении обмоток статора звездой показана на рис. 1а, упрощённый символ такой машины показан на рис. 1б.
А В С А В С
а) б) Рис. 1. Принципиальная схема асинхронного двигателя с короткозамкнутым ротором (а) и упрощённый символ этого двигателя (б)
Механическая характеристика Механической характеристикой двигателя называется зависимость частоты вращения ротора от электромагнитного момента, т.е. n2 = f(M) при U1 = const, f1 = const. От её характера зависит пригодность асинхронного двигателя для привода различных механизмов. Так, для многих станков требуется, чтобы частота вращения двигателя мало менялась при изменении нагрузки. Наряду с этим рабочие механизмы, работающие при резко изменяющихся нагрузках (прессы, краны), требуют быстрого изменения частоты вращения при таких нагрузках. На рис. 2 показана механическая характеристика асинхронного двигателя с короткозамкнутым ротором. n n2 С В 2 n2p А n2н 1 К
Мр Мн Мп Мк М Рис. 2. Механическая характеристика АД (1) и нагрузка например, вентилятор(2)
На рис. 2 обозначено: Мр и n2p – электромагнитный момент и скорость вращения двигателя в рабочей точке В; Мн и n2н - электромагнитный момент и скорость вращения двигателя в точке номинального режима (точка А); Мп – пусковой момент АД. При включении статорной обмотки в сеть её магнитное поле начинает вращаться с синхронной частотой n1, а ротор под влиянием сил инерции в первый момент останется неподвижным (n2=0). Из соотношения n2=n1(1-S) следует, что в момент пуска S=1, а момент двигателя равен пусковому моменту Мп. Под его действием ротор начинает вращаться, при этом скольжение уменьшается, а вращающий момент растёт до критического Мк, который достигается при критическом скольжении Sk. Дальнейшее нарастание частоты вращения (уменьшение S) приводит к уменьшению М, который будет убывать до установившегося значения, равного противодействующему моменту сопротивления Мс), приложенному к ротору двигателя Мр=Мс (точка В на рис.2). Если же этот момент соответствует номинальной нагрузке двигателя, установившейся режим работы машины определяется точкой А на механической характеристике с координатами М=Мн и n2=nн. Как видно из рис. 2, частота вращения ротора незначительно изменяется при изменении вращающего момента на участке СК (устойчивый режим работы). Механическую характеристику такого вида называют жёсткой. Пусковые режимы При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения n2=0 до n2. Скольжение при этом меняется от S=1 до S. При пуске должны выполняться два основных требования: вращающий момент должен быть больше момента сопротивления (М>Mc) и пусковой ток Iп должен быть по возможности небольшим. В зависимости от конструкции ротора, мощности двигателя, характера нагрузки возможны различные способы пуска. Для АД с короткозамкнутым ротором, у которых Iп=(5÷7)Iном, возможны следующие способы пуска: 1. Прямой пуск АД 2. Пуск с ограничением пускового тока. Прямым пуском АД называют пуск двигателя непосредственным включением обмоток статора в электрическую сеть. При этом в сети возникает бросок тока, который может вызвать настолько значительное падение напряжения, что другие двигатели, питающиеся от этой сети, могут остановиться. Относительно небольшой пусковой момент таких двигателей (рис. 2) может привести к тому, что при пуске двигателя под нагрузкой он не сможет преодолеть момент сопротивления и не тронется с места. Поэтому прямой пуск АД с короткозамкнутым ротором можно применять только у двигателей малой и средней мощности (примерно до 50 кВт), без нагрузки или при малой нагрузке. Пуск с ограничением пускового тока подразделяется на: а) пуск с переключением обмотки статора с треугольника на звезду, при этом пусковой ток в сети уменьшается в б) пуск с ограничением подводимого напряжения к двигателю путём включения в обмотку статора реактора во время пуска или с помощью автотрансформатора. Необходимо отметить, что при выборе того или иного способа ограничения пускового тока необходимо учитывать, что момент асинхронного двигателя Асинхронного двигателя Анализ выражения (3) даёт следующие способы изменения частоты вращения: 1) изменением частоты 2) изменением числа пар магнитных полюсов, в этом случае получаем ступенчатое изменение за счёт переключения статорной обмотки на различное число полюсов, обычно в отношении 1:2. Следует помнить, что число пар магнитных полюсов определяется количеством и способом соединения катушек в каждой фазе обмотки статора. Следовательно, возможность такого регулирования частоты вращения зависит от конструкции машины; 3) изменением подводимого напряжения к обмотке статора, при этом меняется момент электродвигателя М,соответственно и частота вращения ротора Рабочие характеристики Рабочие характеристики показывают зависимость полезного момента
S Mс I1 I1 Mc S
PH P2 Рис. 3. Рабочие характеристики АД
Порядок выполнения работы 1. Перед началом работы ознакомиться с оборудованием лабораторного стенда и двигателем. Записать в таблицу приборов технические данные электроизмерительных приборов. 2. Удостовериться, что движок реостата RT стоит в крайнем левом положении (его сопротивление максимально) и автоматы QF2 и QF4 отключены. 3. Произвести пуск асинхронного двигателя в режиме холостого хода (МС=0). Для этого включить автомат QF4 и нажать кнопку «ПУСК». Записать значение пускового тока по амперметру рА1. Записать показания приборов в табл. 1, при этом показания ваттметра рW2 берутся со знаком «минус», показание амперметра рА2 умножается на десять с учётом коэффициента трансформации трансформатора тока. Показания тахометра n2 определяются следующим образом: к показанию «большой» стрелки добавляется 500, например, 4,4∙100+500=940 об/мин 4. Включить автомат QF2 и с помощью реостата RT установить момент сопротивления МС = 6 Н⋅М на шкале электромагнитного тормоза. Таблица 1
В строку «Номинальный режим» заносятся паспортные данные двигателя Рн, Iн, Uн, n2н,
Снять показания приборов аналогично предыдущему пункту и записать в табл. 1. Затем нагрузить двигатель соответственно МС = 9 Н⋅М и МС = 12 Н⋅М, снять показания приборов и записать в табл. 1. 5. Произвести отключение асинхронного двигателя в следующей последовательности: - перевести движок реостата RT в крайнее левое положение; - отключить автомат QF2 (питание тормоза); - отключить автомат QF4. 6. Показать результаты экспериментального исследования преподавателю.
Обработка результатов 1. Рассчитать и внести в табл. 1 значения Р1, Р2, Формулы для определения параметров двигателя: потребляемая мощность мощность на валу скольжение где n1 = 1000 об/мин; коэффициент полезного действия коэффициент мощности где Р1, подставляется в кВт 2. По данным расчёта построить: механическую характеристику n2 = f(MC); рабочие характеристики I, M, n2, S, (рабочие характеристики построить в одних осях координат). Контрольные вопросы 1. Сформулировать достоинства и недостатки асинхронных двигателей с короткозамкнутым ротором. 2. В чём состоят недостатки прямого пуска асинхронного двигателя с короткозамкнутым ротором? 3. Перечислить способы регулирования частоты вращения ротора АД, укажите их достоинства и недостатки.
Лабораторная работа №12
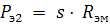
Общие сведения Асинхронный двигатель с фазным ротором (двигатель с контактными кольцами), принципиальная схема которого приведена на рис.1, состоит из двух частей: неподвижной части ― статора и вращающейся ― ротора. Статор (рис.2) представляет собой станину (корпус) (1), выполненную из чугунного литья в виде цилиндрической отливки с лапами для крепления на фундаменте. Внутрь станины запрессован пакет (2), представляющий собой пустотелый цилиндр, набранный из отдельных, покрытых специальным изолирующим лаком, тонких листов электротехнической стали с выштампованными вдоль внутренней поверхности пазами (3). В пазах уложена трехфазная обмотка статора, состоящая из трех одинаковых фазовых обмоток Наличие шести выводов дает возможность соединять обмотки статора или по схеме «звезда» или по схеме «треугольник». К клеммам
Рис. 1
Ротор (рис. 3) представляет собой напрессованный на вал цилиндр (пакет ротора) (1), набранный из отдельных, покрытых специальным изолирующим лаком, тонких листов электротехнической стали с выштампованными вдоль наружной поверхности пазами (2). В пазах уложена трехфазная обмотка ротора Начало фаз обмотки
Рис. 2
Рис. 4
Клеммы
Энергетическая диаграмма Преобразование энергии в асинхронном двигателе, также как и в других электрических машинах, сопровождается ее потерями. Эти потери, которые можно разделить на три вида: электрические, магнитные и механические, и весь процесс преобразования мощности наглядно представлен на энергетической диаграмме (рис. 5). Мощность, подводимая к двигателю из сети:
где
cos
Рис. 5 Электрическая энергия, подводимая к статору, частью теряется в статоре на потери от вихревых токов и гистерезиса в стали (
где
Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью (
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора, она пропорциональна скольжению
Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью
Механическая мощность на валу двигателя Коэффициент полезного действия двигателя
Характеристика двигателя Как и всякий другой электродвигатель, асинхронный двигатель с фазным ротором оценивается по совокупности пусковых, рабочих и регулировочных характеристик. Пуск двигателя и его разгон до максимальной частоты вращения можно проследить по изменению механических характеристик и пусковых токов в зависимости от величины добавочного активного сопротивления Механической характеристикой называется зависимость частоты вращения от вращающего момента на валу при постоянном активном сопротивлении
Семейство механических характеристик асинхронного двигателя с фазным ротором приведено на рис. 6. 
Рис. 6 Вид механической характеристики определяет поведение электропривода в переходных режимах пуска, торможения, изменения частоты вращения, что существенно отражается на производительности механизма, а также на его надежности в условиях эксплуатации. Механические характеристики двигателя при введенном в цепь ротора активном сопротивлении
Активное сопротивление Переход с одной искусственной характеристики на другую происходит после выведения очередной секции сопротивления. Точка «k» диаграммы соответствует началу работы двигателя на естественной механической характеристике. Сопротивление Как известно, максимальный момент
где
Для получения максимального пускового момента должно быть выполнено условие
Число ступеней сопротивления Рабочие характеристики асинхронного двигателя с фазным ротором представляют собой зависимости частоты вращения n2, вращающего момента M, потребляемого тока
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| Поделиться: |

 ,
, ;
; ,
, Эту характеристику можно построить по двум точкам:
Эту характеристику можно построить по двум точкам: прямой линией, получим приближенную внешнюю характеристику трансформатора.
прямой линией, получим приближенную внешнюю характеристику трансформатора.

 Ом;
Ом; Ом, где Рст – потери в стали, измеренные ваттметром;
Ом, где Рст – потери в стали, измеренные ваттметром; Ом;
Ом; ;
; .
. Вт;
Вт; ;
; .
. ƒ(I2) по двум точкам, соответствующим режиму холостого хода (табл. 2) и режиму номинальной нагрузки (табл. 3).
ƒ(I2) по двум точкам, соответствующим режиму холостого хода (табл. 2) и режиму номинальной нагрузки (табл. 3). зависимости коэффициента полезного действия трансформатора от отдаваемой трансформатором мощности.
зависимости коэффициента полезного действия трансформатора от отдаваемой трансформатором мощности. ,
, – коэффициент, учитывающий величину загрузки трансформатора.
– коэффициент, учитывающий величину загрузки трансформатора. ƒ
ƒ  ƒ
ƒ  ;
; раз. Обмотки статора такого двигателя в нормальном режиме включены по схеме «треугольник»;
раз. Обмотки статора такого двигателя в нормальном режиме включены по схеме «треугольник»; .
. питающей сети, при этом используются специальные устройства – преобразователи частоты, от которых питается АД;
питающей сети, при этом используются специальные устройства – преобразователи частоты, от которых питается АД; .
. (момент нагрузки) на валу двигателя, тока
(момент нагрузки) на валу двигателя, тока  обмотки статора, частоты вращения
обмотки статора, частоты вращения  , скольжения
, скольжения  , к.п.д.
, к.п.д.  и коэффициента мощности
и коэффициента мощности  от полезной мощности
от полезной мощности  на валу двигателя при работе с номинальным напряжением
на валу двигателя при работе с номинальным напряжением  и частотой
и частотой  (рис. 3).
(рис. 3). %
%
 . Номинальный момент МСН рассчитывается по формуле
. Номинальный момент МСН рассчитывается по формуле
 %, S %, cos
%, S %, cos 



 , повернутых друг относительно друга вдоль окружности пакета статора на 120 электрических градусов. Начала обмоток
, повернутых друг относительно друга вдоль окружности пакета статора на 120 электрических градусов. Начала обмоток  и концы
и концы 
 выведены на щиток машины.
выведены на щиток машины.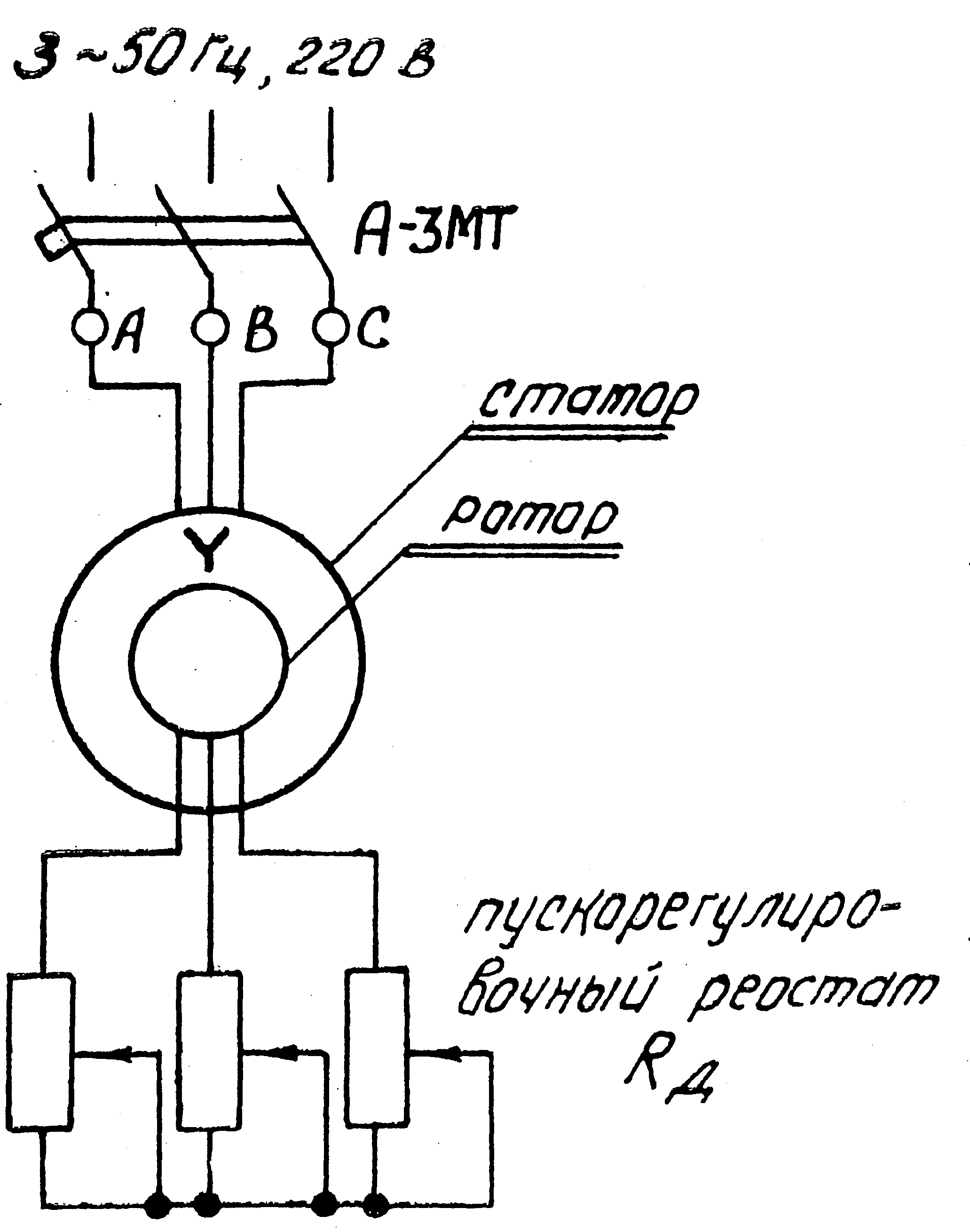
 выполненная по типу статорной обмотки и соединенная по схеме «звезда».
выполненная по типу статорной обмотки и соединенная по схеме «звезда». ,
,  ,
,  выведены внутри пустотелого вала и присоединены к контактным кольцам (3). На кольцах наложены медно-графитные щетки (4),соединенные с клеммами
выведены внутри пустотелого вала и присоединены к контактным кольцам (3). На кольцах наложены медно-графитные щетки (4),соединенные с клеммами 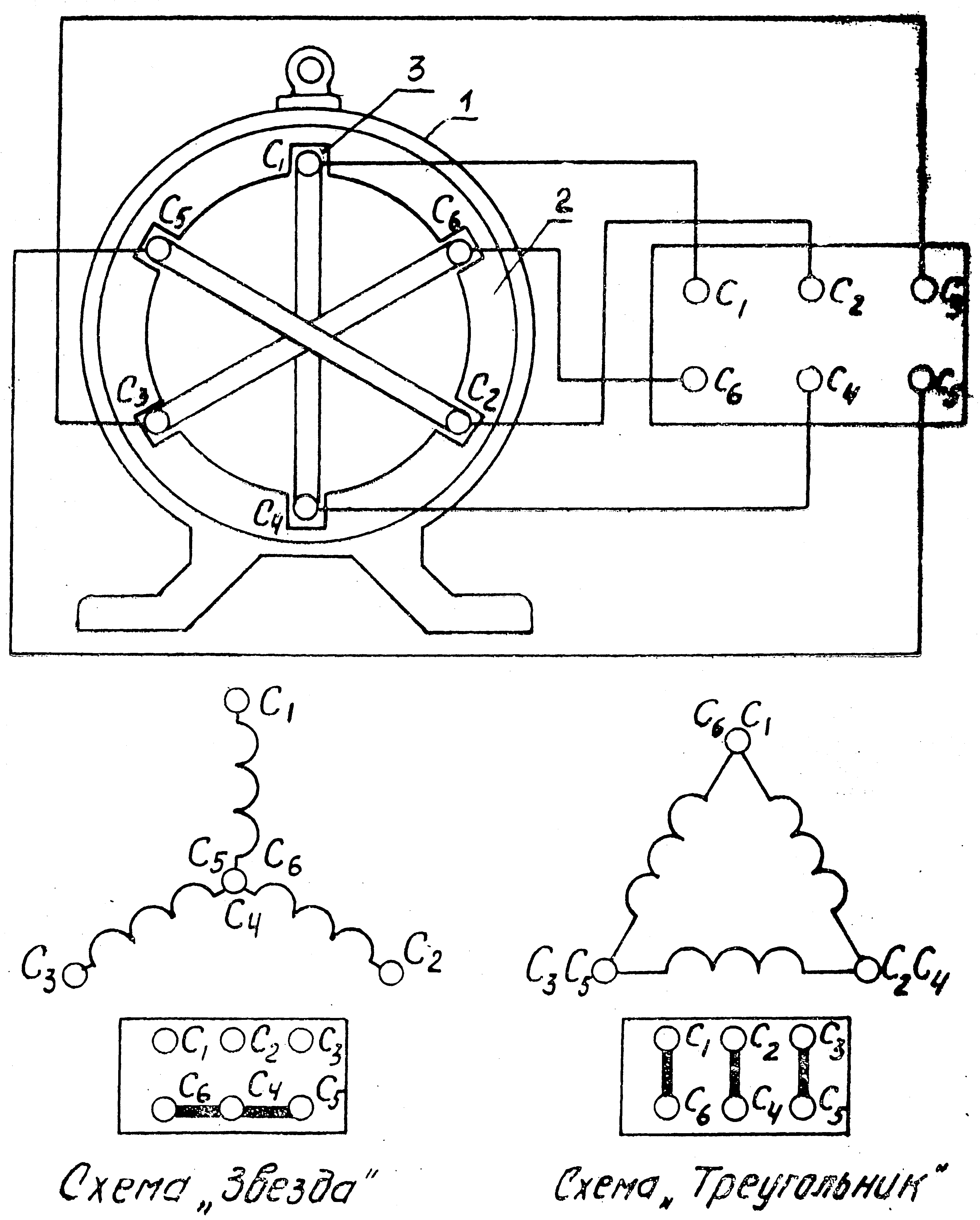
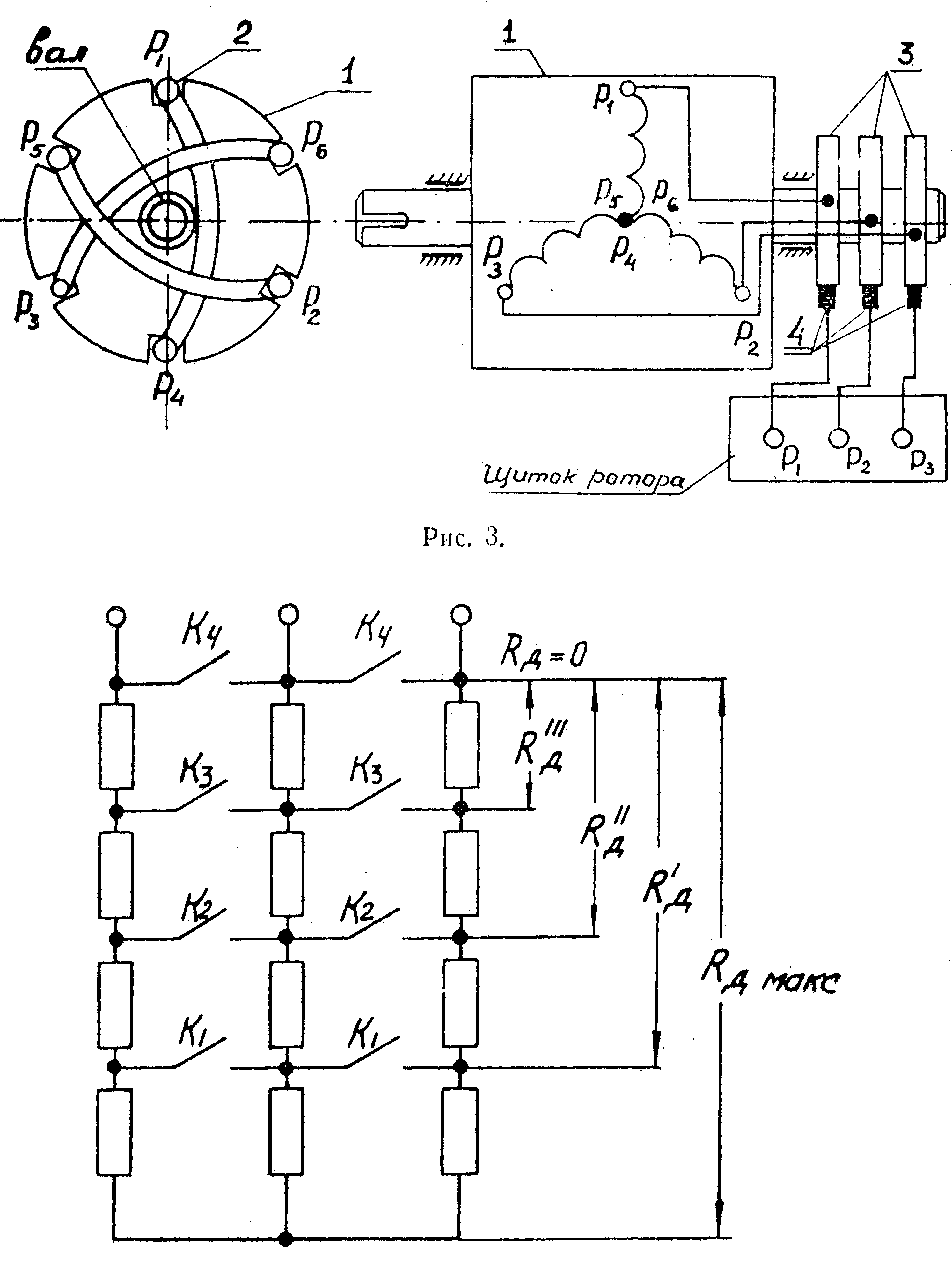
 (рис. 4), который состоит из трех, разделенных на секции, одинаковых активных сопротивлений
(рис. 4), который состоит из трех, разделенных на секции, одинаковых активных сопротивлений  можно уменьшить ступенями (
можно уменьшить ступенями ( ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  последовательным переводом рукоятки (маховичка) реостата
последовательным переводом рукоятки (маховичка) реостата  ⋅
⋅  ⋅ cos
⋅ cos  , Вт,
, Вт, – напряжение, приложенное к фазе обмотки статора, В;
– напряжение, приложенное к фазе обмотки статора, В;
 ) и на потери в проводниках обмотки (
) и на потери в проводниках обмотки ( )
) ⋅
⋅  , Вт,
, Вт, – число фаз обмотки статора (для трехфазного двигателя
– число фаз обмотки статора (для трехфазного двигателя  )
) ― (
― ( .
. =
=  .
. , кВт, меньше полной механической мощности
, кВт, меньше полной механической мощности  и добавочных s w:val="28"/></w:rPr><m:t>РґРѕР± </m:t></m:r></m:sub></m:sSub></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">
и добавочных s w:val="28"/></w:rPr><m:t>РґРѕР± </m:t></m:r></m:sub></m:sSub></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  потерь.
потерь. ⋅ 100%.
⋅ 100%. = f (M) при
= f (M) при  вращающегося магнитного поля статора. Работа двигателя на естественной механической характеристике наиболее экономична. Естественная механическая характеристика является самой жесткой, т.е. при изменении нагрузки частота вращения двигателя изменяется незначительно. Но при работе на естественной механической характеристике двигатель имеет малый пусковой момент
вращающегося магнитного поля статора. Работа двигателя на естественной механической характеристике наиболее экономична. Естественная механическая характеристика является самой жесткой, т.е. при изменении нагрузки частота вращения двигателя изменяется незначительно. Но при работе на естественной механической характеристике двигатель имеет малый пусковой момент  = (0,7 ÷ 1,8)
= (0,7 ÷ 1,8)  и большой пусковой ток
и большой пусковой ток = (5,5 ÷ 7,0)
= (5,5 ÷ 7,0) 
 .
. имеет место при критическом скольжении
имеет место при критическом скольжении  , которое определяется формулой:
, которое определяется формулой: ,
, – активное сопротивление фазы обмотки ротора, Ом;
– активное сопротивление фазы обмотки ротора, Ом; – индуктивное сопротивление фазы обмотки неподвижного ротора, Ом.
– индуктивное сопротивление фазы обмотки неподвижного ротора, Ом. = 1
= 1 , коэффициента мощности сos
, коэффициента мощности сos  , КПД η от мощности на валу s w:val="32"/></w:rPr><m:t>2 </m:t></m:r></m:sub></m:sSub><m:r><w:rPr><w:rFonts w:ascii="Cambria Math" w:h-ansi="Cambria Math"/><wx:font wx:val="Cambria Math"/><w:i/><w:sz w:val="32"/><w:sz-cs w:val="32"/></w:rPr><m:t> </m:t></m:r></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">
, КПД η от мощности на валу s w:val="32"/></w:rPr><m:t>2 </m:t></m:r></m:sub></m:sSub><m:r><w:rPr><w:rFonts w:ascii="Cambria Math" w:h-ansi="Cambria Math"/><wx:font wx:val="Cambria Math"/><w:i/><w:sz w:val="32"/><w:sz-cs w:val="32"/></w:rPr><m:t> </m:t></m:r></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  при
при  = const и f1 = const, т.е.
= const и f1 = const, т.е. , сos
, сos 


