
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип вимірювання дальності до цілі і до ракети.Содержание книги
Поиск на нашем сайте
Визначення дальності до цілі засноване на постійності швидкості і прямолінійності розповсюдження радіохвиль. Час розповсюдження радіохвиль від координатора цілі і назад
де В імпульсних радіотехнічних координаторах цілі (ракети) час затримки Використовують непрямі способи: метод індикаторів, метод рахункових імпульсів і фазометрический метод. Метод індикаторів припускає наявність в КЦ індикатора дальності на електронно-променевій трубці. Розгортка індикатора запускається імпульсом нульової дальності ( Одночасно із запуском розгортки індикатора система вимірювання дальності формує і подає на індикатор рухомий імпульс дальності ( Вочевидь, спостерігаючи картину на індикаторі, за допомогою штурвалу дальності пересуває Метод лічильних (рос. - счетных) імпульсів припускає заповнення часового інтервалу
Тоді дальність до цілі може бути визначена за формулою:
де Для підрахунку числа імпульсів найчастіше використовують інтегратори, що працюють як лічильники. Метод лічильних імпульсів лежить в основі побудови цифрових систем вимірювання дальності ( Очевидно, точність вимірювання дальності за цим методом залежить від величины
Фазометричний метод. При цьому методі одночасно з випромінюванням в простір зондуючого імпульсу запускається генератор стабільних синусоїдальних коливань. Він генерує опорне гармонійне коливання з постійним періодом
Одночасно запускається фазообертач, який вимірює зміну фази опорного коливання до моменту приходу ехо-імпульсу цілі В цьому випадку дальність до цілі може бути розрахована за наступними формулами:
Наприклад, при F=150 кГц (в
Всі три методи застосовуються в радіолокаційних станціях ЗК БД и МД ППО СВ.
Типова функціональна схема системи вимірювання дальності (СВД) цілі за допомогою індикатора
Схема наведена на Мал. 67. На схемі позначено: ГПН – генератор пилкоподібної напруги;
На Мал. 68 наведені часові діаграми напруги, що пояснюють роботу схеми. Імпульс нульової дальності ІНД (Мал. 68 а) запускає розгортку індикатора дальності і генератор пилкоподібної напруги. Пилкоподібна напруга поступає на схему порівняння. На другий вхід цієї схеми поступає постійна напруга керування Оператор
Дана схема реалізована в ССЦ ЗРК "Оса" в режимі ручного супроводу цілі по дальності.
Принципи побудови автодальномірів КЦ (КР) Автодальноміри призначені для автоматичного супроводу цілі по дальності. Режим автоматичного супроводу "АС" вмикається натисканням кнопки "АС" після поєднання При зміні дальності до цілі виникатиме часове розузгодження При цьому реалізується наступний алгоритм визначення дальності до цілі:
Т.ч., автодальномір це слідкуюча система. Для вимірювання часового розузгодження Принцип формування сигналу помилки ілюструється Мал. 69. На Мал. 69 а) показаний випадок, коли часове розузгодження Типова функціональна схема аналогового автодальноміра представлена на Мал. 70. У основі її лежить типова схема СВД, яка була розглянута в п. 5.5.2. Функції оператора РС в автодальномірі виконує двигун. Імпульс нульової дальності ІНД запускає ГПН, який формує пилкоподібну напругу. Ця напруга надходить до схеми порівняння, куди одночасно надходить і напруга керування з потенціометра затримки. Вимірювальний імпульс
При зміні дальності до цілі „ехо-імпульс” цілі змінить своє часове положення. Виникне часове розузгодження його положення з серединою напівстробів. Часовий дискримінатор сформує сигнал помилки Так відбувається процес автоматичного супроводу цілі по дальності. Схема аналогового автодальноміра реалізована в ССЦ і СВР ЗРК "Оса".
|
|||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 475; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.113.24 (0.006 с.) |

 (час затримки) пов'язано з дальністю до цілі
(час затримки) пов'язано з дальністю до цілі  співвідношенням:
співвідношенням: ,
, - швидкість світла.
- швидкість світла. є часом між моментом випромінювання зондуючого імпульсу і моментом приходу „ехо-імпульса” цілі. Він надзвичайно малий і прямим способом його виміряти неможливо.
є часом між моментом випромінювання зондуючого імпульсу і моментом приходу „ехо-імпульса” цілі. Він надзвичайно малий і прямим способом його виміряти неможливо. ), за часом співпадаючим з моментом випромінювання зондуючого імпульсу (Мал. 64). Розгортка пов'язана із шкалою дальності.
), за часом співпадаючим з моментом випромінювання зондуючого імпульсу (Мал. 64). Розгортка пов'язана із шкалою дальності. ). Це – вимірювальний імпульс. На розгортці індикатора він спостерігається у вигляді прямокутного імпульсу. На індикатор надходить також „ехо-імпульс” цілі.
). Це – вимірювальний імпульс. На розгортці індикатора він спостерігається у вигляді прямокутного імпульсу. На індикатор надходить також „ехо-імпульс” цілі. каліброваними стабільними лічильними імпульсами частоти
каліброваними стабільними лічильними імпульсами частоти  („сч” від рос. счетные). Період проходження їх
(„сч” від рос. счетные). Період проходження їх  відповідає зміні дальності на величину
відповідає зміні дальності на величину  . Очевидно, що
. Очевидно, що .
.
 – кількість лічильних імпульсів в інтервалі
– кількість лічильних імпульсів в інтервалі  ).
). в
в  вибрано
вибрано  . При цьому
. При цьому .
.

 , тобто частотою
, тобто частотою  (Мал. 66).
(Мал. 66).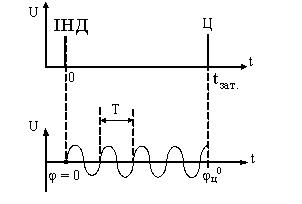
 (у градусах).
(у градусах). ;
;  ;
;  .
. ):
): .
. – резистор затримки;
– резистор затримки; – напруга керування;
– напруга керування; – імпульс запуску;
– імпульс запуску; – оператор ручного супроводу.
– оператор ручного супроводу.

 між енергетичним центром „ехо-імпульсу” цілі і серединою напівстробів супроводу. Тому при супроводі цілі по дальності треба постійно пересувати напівстроби супроводу так, щоб їх середина співпадала з енергетичним центром „ехо-імпульсів” цілі.
між енергетичним центром „ехо-імпульсу” цілі і серединою напівстробів супроводу. Тому при супроводі цілі по дальності треба постійно пересувати напівстроби супроводу так, щоб їх середина співпадала з енергетичним центром „ехо-імпульсів” цілі. .
. застосовуються часові дискримінатори. Виконавчим пристроєм є двигун, об'єктом управління – рухомі напівстроби супроводу.
застосовуються часові дискримінатори. Виконавчим пристроєм є двигун, об'єктом управління – рухомі напівстроби супроводу. .
.





