
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поняття методу наведення зенітних керованих ракет на ціль.Содержание книги
Поиск на нашем сайте
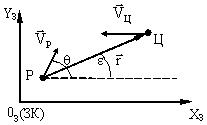
Кінематика – це розділ теоретичної механіки, в якому вивчаються геометричні властивості руху тіл в незалежності від фізичних факторів, що супроводжують цей рух. В кінематиці не враховують вплив різних сил і моментів на рух ЗКР. В кінематиці наведення ЗКР прийняті наступні припущення: ‑ ракета і ціль є матеріальними точками, які співпадають з їх центрами тяжіння; ‑ ціль рухається горизонтально, прямолінійно та рівномірно; ‑ швидкість цілі ‑ швидкість ракети ‑ система керування польотом ракети є ідеальною, тобто немає інерційності та запізнень. Лінія, по якій переміщується центр тяжіння ракети, називається траєкторією польоту ракети. Розрізняють реальну і кінематичну траєкторію польоту ракети. Реальна – це така траєкторія, за якою реально рухається центр мас ракети. Кінематична траєкторія (КТ) – це належна (розрахована, задана) траєкторія; якщо центр мас ракети переміщується по цій траєкторії, то забезпечується теоретично точне влучення ракети в ціль (промах дорівнює нулю). Кінематична траєкторія визначається методом наведення ракети на ціль. Методом наведення ракети на ціль називається заданий закон зближення ракети з ціллю, який у відповідності до координат і параметрів конкретної цілі визначає належний рух ЗКР за кінематичною траєкторією. Задати метод наведення означає визначити математичну формулу для розрахунку кінематичної траєкторії в зенітному комплексі. Траєкторії руху ракети і цілі прийнято будувати в земній нерухомій системі координат (СК) Ось Ось Траєкторії руху ракети та цілі прийнято задавати відповідними сферичними координатами. На Мал. 16 приведені сферичні координати точки К кінематичної траєкторії. Точка К задана трьома координатами:
εК - кут місця точки βК - азимут крапки точки rК – похилена дальність до точки Сферичні координати цілі в цій же СК позначаються: εЦ, βЦ, rЦ. Сферичні координати ракети, що рухається за реальною траєкторією: εР, βР, rР. Як правило, метод наведення (один або декілька) в ЗК вже задані. Необхідно знати їх властивості, переваги і недоліки, для грамотного ведення бойової роботи.
2.1.2. Метод наведення телекерованих ракет на ціль "трьох точка".
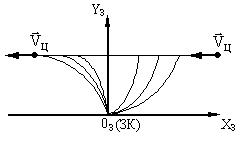
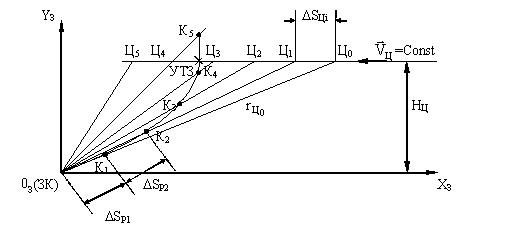
Даний метод реалізований в ЗГРК „Тунгуска - М” і ЗРК „Оса-АКМ”. Метод наведення „трьох точка” визначається правилом, відповідно до якого, на протязі усього керованого польоту, ракета повинна знаходитися на лінії зенітний комплекс – ціль. На Мал. 18 якісно побудовано КТ цього методу для наведення ЗКР тільки у вертикальній площині (Мал. 18) при стрільбі назустріч, будують КТ, як правило, по точках з дискретністю за часом Позначимо через За інтервали часу З’єднуємо точки Якщо ракету наводити методом "ТТ", то в кожен момент часу вона повинна знаходитися на лініях Для знаходження точок КТ розрахуємо довжину відрізків шляху, які ракета проходитиме за інтервали часу
де Знаходимо точки КТ, відкладаючи на З побудови виходить, що КТ методу "ТТ" - це увігнута (при стрільбі назустріч) або опукла (при стрільбі навздогін) крива. Кривизна її, очевидно, збільшуватиметься із збільшенням Мірою кривизни КТ є потрібне нормальне прискорення (Мал. 19)
З визначення методу „ТТ” і з побудови КТ випливають наступні кінематичні рівняння методу:
Відповідно до цих формул в ЗГРК „Тунгуска” і ЗРК „Оса” і розраховуються координати кінематичних траєкторій. Третє рівняння означає, що ракетою у польоті по дальності не керують. У кожен момент часу ЗКР досягає тієї дальності, яку визначає програма роботи її двигуна (двигунової установки). Насправді ракета летить не за кінематичною траєкторією, а за реальною. Тобто вона має відхилення від КТ (Мал. 20). У кутовій мірі величини відхилень складають:
Для зручності утворення команд управління польотом ракети використовують лінійні відхилення:
Лінійні відхилення З використанням помилок по положенню формують команди управління польотом ракети:
де Ці команди шифрують, переводять на високу частоту і випромінюють у напрямку ракети. Для методу наведення ТТ:
Т.ч. для реалізації методу „ТТ” в складі ЗК повинні бути: станція супроводження цілі (вимірювати Переваги методу „ТТ”: ‑ простота технічної реалізації (прості формули для розрахунку координат КТ); ‑ висока завадозахищеність від активних радіозавад (для розрахунку координат КТ не потрібна інформація про дальність до цілі); - мала кривизна КТ при стрільбі „навздогін”. Недоліки методу ТТ: ‑ велика кривизна КТ при стрільбі по високошвидкісним та висотним цілям, а також цілям що маневрують; ‑ при стрільбі по маловисотним цілям КТ у вертикальній площині „стелитиметься” понад землею (Мал. 21). Другий недолік витікає з того, що, як видно з Мал. 3, КТ методу ТТ за висотою завжди знаходиться нижче траєкторії польоту цілі. Тому при стрільбі по цілях, що летять на гранично малих висотах, метод ТТ для вертикальної площини наведення, так би мовити, удосконалюють (Мал. 21):
де Модифіковані методи наведення отримали нові назви:
|
||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 440; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.119.119 (0.009 с.) |

 відома за величиною та напрямком;
відома за величиною та напрямком; відома тільки за напрямком;
відома тільки за напрямком; . Це прямокутна правостороння СК з початком в точці стояння зенітного комплексу. Ось
. Це прямокутна правостороння СК з початком в точці стояння зенітного комплексу. Ось  лежить в плоскості горизонту і спрямована по заданому основному напрямку стрільби зенітного комплексу.
лежить в плоскості горизонту і спрямована по заданому основному напрямку стрільби зенітного комплексу.

 доповнює СК до правої трійки і лежить у площині горизонту.
доповнює СК до правої трійки і лежить у площині горизонту.


 ;
; .
. - похилу дальність до цілі у момент пуску ракети. Відповідно, точка
- похилу дальність до цілі у момент пуску ракети. Відповідно, точка  - положення цілі у момент пуску ЗКР.
- положення цілі у момент пуску ЗКР. . Послідовними положеннями її на траєкторії будуть точки
. Послідовними положеннями її на траєкторії будуть точки  .
. .
. .
.
 - середня швидкість ЗКР на інтервалі
- середня швидкість ЗКР на інтервалі  (Мал. 18). З’єднуючи точки
(Мал. 18). З’єднуючи точки  , отримаємо КТ. Точка перетину траєкторій Ц і Р - це упереджена точка зустрічі (УТЗ) ракети з ціллю.
, отримаємо КТ. Точка перетину траєкторій Ц і Р - це упереджена точка зустрічі (УТЗ) ракети з ціллю. і зменшенням
і зменшенням  і
і  ракети, необхідне для її руху по даній КТ, або потрібне перевантаження ракети
ракети, необхідне для її руху по даній КТ, або потрібне перевантаження ракети  , де
, де  - прискорення вільного падіння
- прискорення вільного падіння  . Для оцінних розрахунків можна використовувати формулу (тільки для точки зустрічі з ціллю):
. Для оцінних розрахунків можна використовувати формулу (тільки для точки зустрічі з ціллю): .
.


 ,
,  носять назву помилок по положенню ракети відносно КТ.
носять назву помилок по положенню ракети відносно КТ.
 – коефіцієнт.
– коефіцієнт.
 ,
,  ), станція візування ракет (вимірювати
), станція візування ракет (вимірювати  ,
,  ), лічильно-вирішувальний пристрій утворення команд керування польотом ракети (розраховувати
), лічильно-вирішувальний пристрій утворення команд керування польотом ракети (розраховувати  ,
,  , формувати
, формувати  ,
,  ), станція передачі команд на борт ЗКР.
), станція передачі команд на борт ЗКР. ,
, – додаткове упередження для координати
– додаткове упередження для координати  КТ. Формули для розрахунку
КТ. Формули для розрахунку  ,
,  ,
,  . Вони реалізують у вертикальній площині навісну кінематичну траєкторію.
. Вони реалізують у вертикальній площині навісну кінематичну траєкторію.


