
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Аналіз методів наведення зенітних керованих ракет на цільСодержание книги
Поиск на нашем сайте
Задача № 1. Побудувати кінематичну траєкторію ЗКР у вертикальній площині при наведенні методом Визначити похилу дальність до точки зустрічі Рішення наведене на Мал. 22: ‑ у робочому зошиті нанесіть осі земної системи координат ‑ виберіть масштаб побудови: у 5 см 1 км. (виходячи з розмірів осей); ‑ зробіть оцифрування осей; ‑ побудуйте траєкторію польоту цілі; ‑ виберіть часовий інтервал діскрети
У нашому випадку:
Якщо вибрати
Якщо ‑ розрахуйте відрізки шляху, які пройде ціль за час
‑ визначить положення цілі у момент натискання кнопки ‑ нанесіть на траєкторію польоту цілі послідовні її положення через інтервали ‑ з’єднаєте точки ‑ розрахуйте шлях, який проходитиме ракета за час
‑ на лініях ‑ з’єднаєте точки ‑ знайдіть положення упередженої точки зустрічі (як точку перетину траєкторій цілі і ракети); ‑ за допомогою лінійки, з урахуванням масштабу визначіть похилу дальність до упередженої точки зустрічі, що попереджує: ‑ знаючи швидкість цілі, визначите польотний час ракети до упередженої точки зустрічі
Задача № 2. Вирішити задачу 1 для швидкості цілі Рішення приведене на Мал. 22.
Кривизна КТ із збільшенням
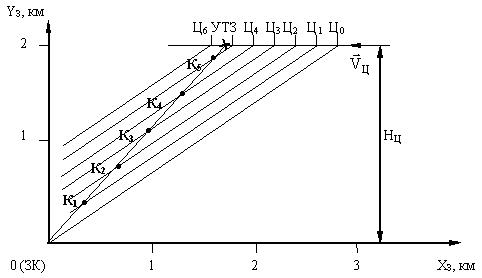
Задача № 3. У завданні 1 вважати, що наведення ЗКР на ціль здійснюється методом пропорційного зближення при великому значенні коефіцієнта пропорційності З'ясування завдання. Оскільки коефіцієнт пропорційності
В цьому випадку метод пропорційного зближення вироджується у метод паралельного зближення.
Рішення. Методика побудови (Мал. 23) залишається такою ж, як і в завданні № 1, аж до нанесення на траєкторію польоту цілі поточних її положень через часові інтервали ‑ з’єднаєте початок координат з точкою ‑ проведіть через точки ‑ починаючи від точки 0, відкладайте послідовно на лініях Позначте поточні точки КТ ‑ з’єднайте точки ‑ знайдіть упереджену точку зустрічі ракети з ціллю, похилу дальність до неї
Задача № 4. Побудувати КТ ЗКР у вертикальній площині для методу наведення
Рішення: Проводиться по методиці завдання № 1 і приведено на Мал. 24. Доцільно вибрати масштаб в Тоді – Відстані
де
Результати розрахунків зведені в таблицю:
Побудова виконана на Мал. 24.
Задача № 5. Вирішити задачу 4 для Рішення приведене на Мал. 24. Кривизна КТ помітно збільшилася
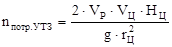
Задача № 6. Для початкових даних завдач № 4 і № 5 розрахувати потрібні перевантаження в упередженій точці зустрічі ракети з ціллю. Рішення.
Для прямолінійного горизонтального рівномірного польоту цілі
Тому
Тоді для задачі № 4:
Для задачі № 5:
Способи керування ракетами. Розрізняють системи: · Командні телекерування (ТУ-I, ТУ-II). · Системи теленаведення (однопроменеві, двопроменеві). · Системи самонаведення (активне, н/акт, пасивні) · Системи комбіновані Системи командного телерадіоуправління - така система, у якій необхідний рух ракети визначається наземним пунктом, що здійснює безперервний контроль як за Ц так і за Р. У цих системах команди керування виробляються у ЦВС(СРП) і за допомогою СПК передаються на ракету. ССЦ робить захоплення цілі на автосупровід АС по даним СОЦ і здійснює точний вимір координат. Після пуску ЗКР її координати визначаються СВР. Для надійного супроводу ракети, що має малу ЕПР, на борті ракети встановлюють радіовідповідач. Координати цілі й ракети обмірювані ССЦ і СВР надходять у ЦВС (СРП) для визначення відхилення ракети від заданої кінематичної траєкторії руху й виробляє команди керування, що через СПК передається по радіоканалові на ракети. Команди керування ракетою перед випромінювання преобразуються в керуючу напругу, кодується й випромінюється в простір. Прийняті ракетою керуючі сигнали дешифруються, преобразуються в керуючі струми й таким чином відбувається відпрацьовування сигналів неузгодженості. При цьому ракета виходить на задану кінематичну траєкторію. Система теленаведення по радіолучу - команди керування, вироблювані станцією наведення ракет, використовуються керування положення радіолучами, за допомогою якого задається необхідне кутове положення ракети. Самонаведення - команди керування польотом виробляються безпосередньо на борті ракети в голівці самонаведення й автопілоті. Розрізняють наступні типи ЗУР із самонаведенням: · Активне самонаведення, коли передавач і приймач перебувають на борті ракети. Бортовий координатор перетворить отримані із ГСН відображені від цілі сигнали в сигнали керування, які подаються в автопілот і далі на кермові машини. · Напівактивний метод самонаведення, у якому джерело опромінення цілі перебуває на наземному пункті керування, тобто здійснює "підсвічування" цілі, а голівка самонаведення таким чином робить прийом відображених сигналів і перетворення сигналів у сигнали керування. · Пасивний - для виміру параметрів руху мети і її пеленгацій використовується енергія, що випромінює сама ціль: світлова й теплова енергії. · Комбіновані системи - наведення ракети на ціль здійснюється послідовним застосуванням декількох способів: на початковій ділянці польоту - командний, а на завершальному етапі - самонаведення.
2.3 Класифікація, характеристика систем керування ракетами. Поняття про контур управління. Автопілот (АП) ЗКР – автоматичний пристрій, що здійснює керування кермовими органами ракети у відповідності з командами керування. Команди керування виробляються станцією наведення ракет (СНР), СПК, головкою самонаведення. Також АП здійснює керування кермами ЗКР у відповідності до сигналів своїх чутливих елементів (гіроскопів, датчиків лінійних прискорень, датчиків швидкісного напору та інших). АП ЗКР вирішує наступні завдання: ‑ відхиляє рулі ракети відповідно до команд керування; ‑ обмежує сумарний сигнал на вході кермового приводу; ‑ стабілізує положення корпусу ЗКР, щодо осей симетрії (центру тяжіння); ‑ формує програмні команди для керування кермами при польоті ЗКР на некерованій ділянці траєкторії; ‑ вирішує специфічні для ЗКР завдання конкретного зенітного комплексу. Датчик кутової швидкості (ДКШ (рос. - ДУС), вимірює кутову швидкість обертання ракети відносно однієї із осей симетрії (на рисунку відносно Сумарний сигнал керування Схема Мал. 26 реалізована в каналах тангажу і курсу автопілоту ЗКР ПЗРК. Тут моменти збурення, щодо поперечних осей симетрії корпусу виникають при перекиданні руля з одного крайнього положення в інше. По крену ця ЗКР обертається примусово. Схема Мал. 26 реалізована також в каналах курсу і тангажа ЗКР ЗРК У каналах курсу і тангажа ЗКР ЗРК ЗКР
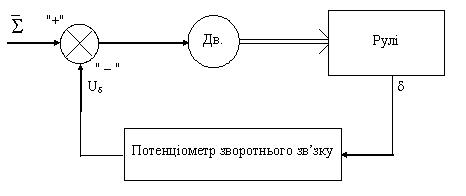
В автопілотах ЗКР ЗК БД кожною парою рулів управляє одна кермова машинка, яка конструктивно входить до кермового приводу (Керм.П). Вона складається з двигуна, редуктора і потенціометра зворотного зв'язку. При цьому реалізується схема, наведена на Мал. 27. Двигун може бути електричним (ЗУР ЗРК Наявність зворотного зв'язку дозволяє контролювати точність відпрацювання кермами сумарного сигналу керування. Конструктивно елементи автопілоту у всіх ЗКР ЗК БД і МД розташовані, в основному, в другому відсіку, тобто, поряд з кермом.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 558; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.94 (0.006 с.) |

 , якщо ціль здійснює рівномірний горизонтальний прямолінійний політ на висоті
, якщо ціль здійснює рівномірний горизонтальний прямолінійний політ на висоті  із швидкістю
із швидкістю  . Стрільба ведеться назустріч. Похила дальність до цілі у момент пуску ракети
. Стрільба ведеться назустріч. Похила дальність до цілі у момент пуску ракети  . Швидкість польоту ЗКР постійна
. Швидкість польоту ЗКР постійна  .
. і час польоту ракети
і час польоту ракети  до упередженої точки зустрічі.
до упередженої точки зустрічі. (по
(по  , по
, по  );
); побудови КТ. Для цього оціните, скільки точок КТ доведеться побудувати. Число точок приблизно може бути рівне:
побудови КТ. Для цього оціните, скільки точок КТ доведеться побудувати. Число точок приблизно може бути рівне: .
. .
. , то треба буде побудувати
, то треба буде побудувати  точок.
точок.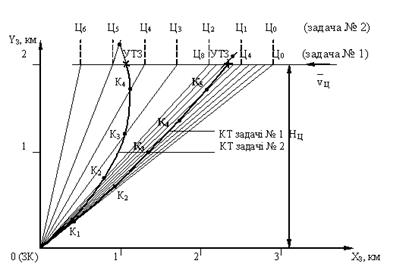
 , тоді число точок вже буде
, тоді число точок вже буде  . Очевидно, можна вибрати
. Очевидно, можна вибрати  :
: :
: (у масштабі
(у масштабі  );
); . Це буде точка
. Це буде точка  на траєкторії польоту цілі на похилій дальності
на траєкторії польоту цілі на похилій дальності  від ЗК;
від ЗК; (точки
(точки  );
); з початком координат (з точкою стояння ЗК);
з початком координат (з точкою стояння ЗК); (у масштабі
(у масштабі  );
); послідовно через
послідовно через  нанесіть точки
нанесіть точки  ;
; ;
; :
: .
. і зробити висновок про зміну кривизни КТ.
і зробити висновок про зміну кривизни КТ. ,
, 
 збільшується.
збільшується. .
. .
. для ЗКР, що знаходиться на пусковій установці. Вона нахилена до площини горизонту під кутом
для ЗКР, що знаходиться на пусковій установці. Вона нахилена до площини горизонту під кутом  ;
; ;
; , які пролітатиме ЗКР за інтервали часу -
, які пролітатиме ЗКР за інтервали часу -  ;
; і час польоту ракети до неї
і час польоту ракети до неї 
 із швидкістю
із швидкістю  . Стрільба ведеться назустріч. Похилена дальність до цілі у момент пуску ЗКР
. Стрільба ведеться назустріч. Похилена дальність до цілі у момент пуску ЗКР  . Закон зміни швидкості ракети
. Закон зміни швидкості ракети  заданий наступною таблицею:
заданий наступною таблицею:
 ,
,  .
.
 і часову дискретність побудови -
і часову дискретність побудови -  .
. (у масштабі
(у масштабі  ).
).
 - середня швидкість польоту ракети на
- середня швидкість польоту ракети на  інтервалі побудови КТ.
інтервалі побудови КТ.



 ;
; 
 і зробити висновки з кривизни КТ.
і зробити висновки з кривизни КТ. ,
, 

 .
. .
. .
. .
. .
.
 ). Для парирування (демпфування) цих коливань за допомогою корегующого приладу (КП) формується сигнал
). Для парирування (демпфування) цих коливань за допомогою корегующого приладу (КП) формується сигнал  , і він з зворотнім знаком подається на сумуючий вузол, де сумується зі своїм знаком з командами керування.
, і він з зворотнім знаком подається на сумуючий вузол, де сумується зі своїм знаком з командами керування. далі посилюється і обмежується. У електронному блоці відбувається перемикання коефіцієнтів передачі сумарного сигналу залежно від режиму польоту ЗКР так, щоб постійно забезпечувати динамічну стійкість системи керування польотом ракети (СКПР). Обмеження необхідне, щоб ЗКР не вийшла на критичні кути атаки і ковзання і не переламалася (механічно) під дією неприпустимих поперечних перевантажень.
далі посилюється і обмежується. У електронному блоці відбувається перемикання коефіцієнтів передачі сумарного сигналу залежно від режиму польоту ЗКР так, щоб постійно забезпечувати динамічну стійкість системи керування польотом ракети (СКПР). Обмеження необхідне, щоб ЗКР не вийшла на критичні кути атаки і ковзання і не переламалася (механічно) під дією неприпустимих поперечних перевантажень. .
. відсутній зворотний зв'язок через ДКШ. Проте є зібраний по даній схемі канал крену автопілоту, який запобігає (обмежує) обертанню корпусу ЗКР, щодо подовжньої осі симетрії за рахунок аеродинамічного моменту
відсутній зворотний зв'язок через ДКШ. Проте є зібраний по даній схемі канал крену автопілоту, який запобігає (обмежує) обертанню корпусу ЗКР, щодо подовжньої осі симетрії за рахунок аеродинамічного моменту  ".
". для забезпечення подовжньої статичної стійкості примусово у польоті обертається по крену. Принципових причин для появи кутових швидкостей обертання ЗКР, щодо поперечних осей симетрії у ракети немає. Тому в автопілоті в каналах курсу і тангажа реалізоване тільки пряме коло Мал. 26.
для забезпечення подовжньої статичної стійкості примусово у польоті обертається по крену. Принципових причин для появи кутових швидкостей обертання ЗКР, щодо поперечних осей симетрії у ракети немає. Тому в автопілоті в каналах курсу і тангажа реалізоване тільки пряме коло Мал. 26.
 ), або пневматичним (ЗКР ПЗРК, зенітні комплекси
), або пневматичним (ЗКР ПЗРК, зенітні комплекси  , ЗРК
, ЗРК 


