
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет основных параметров насоса и двигателяСодержание книги
Поиск на нашем сайте
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ Белорусский Национальный Технический Университет Кафедра: “Электропривода и автоматизации промышленных установок и технологических комплексов”
Группа 107612
КУРСОВАЯ РАБОТА по дисциплине: “АВТОМАТИЗИРОВАННЫЕ ЭЛЕКТРОПРИВОДЫ ТИПОВЫХ ПРОМЫШЛЕННЫХ УСТАНОВОК” на тему: “Автоматизированный электропривод насоса ЭЦВ8-40-125”
Выполнил: Бондарчук Р.М. Проверил: Сидоров В.Г.
Минск 2006 СОДЕРЖАНИЕ ВВЕДЕНИЕ.. 4 1. ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ. 5 2. АНАЛИЗ СИСТЕМ ЭЛЕКТРОПРИВОДА И ВЫБОР РАЦИОНАЛЬНОЙ СИСТЕМЫ ДЛЯ ДАННОГО ТИПА ТПМ... 7 3. РАСЧЕТНАЯ ЧАСТЬ. 13 3.1 Исходные данные для расчета. 13 3.2 Расчет основных параметров насоса и двигателя. 15 3.3 Проверка двигателя по прямому пуску. 16 3.4 Расчет и построение технологических характеристик механизма. 17 3.5 Расчет и построение искусственных характеристик турбомеха-низма при регулировании скорости 21 3.6 Расчет и построение механических и электромеханических характеристик двигателя в режимах технологического регулирования. 24 3.7 Расчет потребления электроэнергии насосным агрегатом с ПЧИН-АД и сравнение его с энергопотреблением при регулировании задвижкой. 30 4 ПРОЕКТИРОВАНИЕ (ВЫБОР) ТИПОВОЙ СХЕМЫ СИЛОВЫХ ЦЕПЕЙ УПРАВЛЕНИЯ СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА ДАННОГО ВИДА ТПМ... 32 ЗАКЛЮЧЕНИЕ.. 43 СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.. 44
Основными потребителями электроэнергии в нашей стране являются производственные предприятия и объекты ЖКХ. Подавляющее количество электроэнергии потребляется электроприводами насосов и вентиляторов. Особенно ярко эта тенденция выражена в секторе ЖКХ. В условиях реформирования ЖКХ, перевода этой отрасли на режим самоокупаемости, возникает острая проблема повышения энергоэффективности этой отрасли, снижения аварийности, повышения качества услуг при одновременном снижении затрат на их предоставление. Без решения этой проблемы невозможна не только эффективная, устойчивая работа городской инфраструктуры систем жизнеобеспечения населения, но и её надёжное, безопасное функционирование. Без энергоэффективной работы предприятий ЖКХ невозможно привлечение инвестиций в эту отрасль, недостижимо улучшение качества жилищно-коммунальных услуг, адресная социальная защита населения при оплате жилищно-коммунальных услуг. Необходим переход на качественно новый уровень предоставления жилищно-коммунальных услуг при снижении нерациональных затрат. Одним из наиболее эффективных методов решения этой комплексной проблемы является внедрение современных систем частотного регулирования электроприводов и систем автоматизации. Именно эти методы позволяют в условиях высокой степени износа материально-технической базы ЖКХ резко повысить энергоэффективность работы, повысить качество предоставляемых услуг и существенно снизить аварийность, высвобождая средства для рефинансирования и планомерного обновления оборудования и капитального ремонта коммуникаций. ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ Насос – гидравлическая машина, в которой энергия привода преобразуется в энергию жидкости. Гидравлическими машинами называются технические устройства, преобразующие механическую энергию привода в механическую энергию жидкости, или, наоборот, механическую энергию жидкости в механическую энергию привода. Функцией повысительных насосных станций является поддержание заданного графика давления в напорном трубопроводе. Насосные станции обычно работают в режимах, которые отличаются от режимов, первоначально заложенных в проект. Насосные агрегаты установлены с учётом максимального расхода, который возникает как при пиковых значениях потребления воды в утренние и вечерние часы, так и в экстремальной ситуации (например, пожар). Если регулирование производительности насосных агрегатов не производится, при минимальном расходе в напорном трубопроводе возникает избыточное давление. Это вызывает:
Согласно теме курсового проекта, рассматриваем автоматизированный электропривод насоса первого подъема ЭЦВ8-40-125 с системой электропривода – преобразователь частоты на базе инвертора напряжения – асинхронный двигатель с короткозамкнутым ротором. Агрегат электронасосный ЭЦВ предназначен для подъема питьевой воды из артезианских скважин с целью осуществления городского, промышленного и сельскохозяйственного водоснабжения, орошения и других подобных работ. Обозначение: ЭЦВ8-40-125, где ЭЦВ – тип электроагрегата; 8 – внутренний диаметр обсадной трубы в дюймах; 40 – номинальная подача, 125 – номинальный напор, Агрегат состоит из асинхронного электродвигателя, и многосекционной центробежной насосной части, соединенных между собой жесткой муфтой. Ротор насоса и ротор электродвигателя вращаются в резинометаллических подшипниках. В днище электродвигателя расположен упорный подшипник, воспринимающий осевую нагрузку. На входе в насосную часть установлена защитная сетка-фильтр, предохраняющая насос от попадания крупных механических частиц. Электродвигатель водозаполненный с короткозамкнутым ротором, с синхронной частотой вращения 3000 об/мин. «Беличья клетка» ротора выполнена из меди. Обмотка статора выполнена водостойким проводом. Охлаждение электродвигателя осуществляется перекачиваемой водой. Агрегат подключается к трехфазной сети 380В, 50Гц через станцию управления и защиты, предохраняющую электродвигатель от работы в нештатных режимах. Подключение производить кабелем ВПВ сечением, соответствующим потребляемому току.
Технические характеристики агрегата:
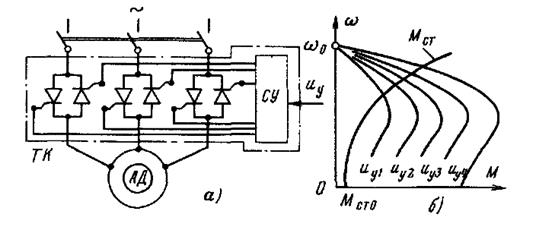
2. АНАЛИЗ СИСТЕМ ЭЛЕКТРОПРИВОДА И ВЫБОР РАЦИОНАЛЬНОЙ СИСТЕМЫ ДЛЯ ДАННОГО ТИПА ТПМ Для установок сравнительно небольшой мощности (7–10 кВт) задача регулирования успешно решается с помощью системы регулятор напряжения – асинхронный двигатель с короткозамкнутым ротором. В качестве регулятора напряжения часто применяют тиристорный коммутатор (Рисунок 2-1,а). Вентиляторная механическая характеристика нагрузки позволяет обеспечить устойчивую работу электропривода по системе ТК – АД в достаточно большом диапазоне скорости без обратных связей (Рисунок 2-1,б). Обычно изменение технологического режима, в котором участвует регулируемый электропривод, протекает достаточно медленно и не требует от привода высокого быстродействия. Поэтому в качестве регулятора напряжения может быть использован и трехфазный магнитный усилитель МУ, включенный в цепь статора (Рисунок 2-7).
Рисунок 1-6. Схема (а) и механические характеристики (б) системы ТК – АД с вентиляторной нагрузкой на валу.
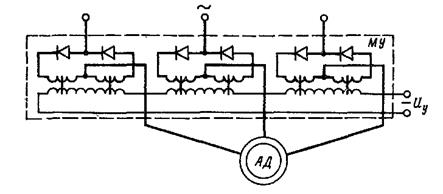
Рисунок 2-2. Схема системы МУ – АД. Этот аппарат хотя и обладает магнитной инерционностью, однако отличается простотой исполнения и надежностью в работе. Магнитный усилитель с внутренней положительной обратной связью по току (с самоподмагничиванием) работает в режиме, близком к режиму регулятора напряжения. Поэтому механические характеристики такой системы привода аналогичны характеристикам системы ТК – АД. Развитие полупроводниковой техники позволяет в настоящее время реализовать импульсный способ регулирования скорости асинхронного двигателя. На Рисунке 2-3,а приведена принципиальная схема включения асинхронного двигателя с короткозамкнутым ротором с импульсным изменением активного сопротивления его статорной цепи. Тиристорный ключ ТК, замыкаясь на время
Рисунок 2-3. Схема (а) и механические характеристики (б) системы импульсного регулирования сопротивления в статорной цепи. Регулируя скважность Введение отрицательной обратной связи по скорости обеспечивает жесткие характеристики и устойчивую работу замкнутой системы электропривода в требуемом для механизма диапазоне скоростей. Механические характеристики электропривода с обратной связью по скорости показаны на Рисунке 2-3,б сплошными линиями для трех значений задающего напряжения При выполнении системы управления тиристорным ключом на постоянном токе управляющая обмотка ОУ однофазного тахогенератора ТГ соединяется с системой управления тиристорным ключом СУ через согласующий элемент СЭ, который в простейшем случае для нереверсивного привода представляет собой выпрямительный мост. Общим недостатком рассмотренных вариантов регулируемого электропривода является выделение потерь скольжения при снижении скорости в самом двигателе. Эти потери вызывают дополнительный нагрев двигателя и требуют соответствующего завышения установленной мощности двигателя. Вопрос об определении необходимого завышения номинальной мощности будет рассмотрен ниже. В установках, где по условиям эксплуатации допустимо применение асинхронного двигателя с фазным ротором, возможности регулируемого электропривода расширяются. Введение дополнительного сопротивления в цепь ротора позволяет вывести часть потерь скольжения из обмоток двигателя. Благодаря этому снижается необходимое завышение габарита двигателя и появляется возможность расширить диапазон мощностей привода при рассмотренных выше способах регулирования скорости. Например, импульсный способ регулирования окажется более целесообразным применительно к коммутации дополнительного сопротивления в роторной цепи (Рисунок 2-4,а). При этом механические характеристики привода обеспечивают устойчивую работу в достаточно большом диапазоне скоростей при разомкнутой системе электропривода (Рисунок 2-4,б). По своим характеристикам данный способ аналогичен реостатному. Его достоинство по сравнению с реостатным способом – возможность плавного регулирования сопротивления.
Рисунок 2-4. Схема (а) и механические характеристики (б) системы импульсного регулирования сопротивления в роторе.
Для мощных приводов находят применение асинхронные и синхронные двигателя в сочетании с регулируемыми муфтами скольжения. В варианте электропривода с гидромуфтой угловая скорость ведомой полумуфты изменяется за счет изменения подачи жидкости в полости муфты. По экономичности данный способ регулирования аналогичен реостатному. Потери мощности скольжения выносятся при этом из роторной цепи двигателя и выделяются в муфте. Механические характеристики электропривода с гидромуфтой показаны на Рисунке 2-5. Скорость ведомой полумуфты, соединенной с валом механизма, изменяется согласно с его характеристикой и характеристикой муфты.
Рисунок 2-5. Механические характеристики электроприво-да с гидромуфтой.
Наиболее эффективный способ регулирования предусматривает изменение скорости вращения рабочего колеса насоса. Благодаря этому можно обеспечить требуемый напор во всей области регулирования, не ухудшая при этом КПД насоса в сравнении с дросселированием. На рисунке 2-6 показано, как изменяется механическая характеристика насоса в зависимости от частоты вращения электродвигателя.,
Физический принцип действия циркуляционных насосов определяет законы подобия для основных характеристик насоса: производительность насоса Q линейно зависит от скорости вращения колеса, создаваемый при этом напор ΔH зависит от квадрата скорости, и, соответственно, требуемая при этом механическая мощность P зависит от куба скорости. Таким образом, потребление электроэнергии при частотном регулировании пропорционально кубу производительности насоса. Регулирование скорости вращения рабочего колеса насоса возможно с помощью электронных преобразователей частоты, которые обеспечивают качественное управление асинхронными электродвигателями в широком диапазоне изменения частоты. При этом с помощью преобразователя частоты по сигналу от датчика давления, установленного в напорном трубопроводе, можно автоматически изменять частоту вращения рабочего колеса насоса, оперативно реагируя на изменение расхода жидкости и обеспечивая поддержание заданного давления с высокой точностью. Применение преобразователей частоты обеспечивает следующие преимущества по сравнению с другими методами: · эффективное использование асинхронных электродвигателей, дешевых в эксплуатации и ремонте; · КПД электродвигателя во всем диапазоне регулирования максимально соответствует КПД электродвигателя в номинальном режиме; · КПД преобразователя 95 – 98 %, коэффициент мощности около 1,0; · плавный пуск электродвигателя, отсутствие гидравлических ударов; · снижения уровня шума при пуске и работе; · автономная безопасная работа, интеграция в АСУ ТП.
Рисунок 4 даёт сравнение различных методов регулирования производительности насосов с точки зрения потребления электроэнергии. Наибольшая эффективность применения преобразователей частоты проявляется на объёктах с большой суточной, сезонной переменной нагрузкой, расходом, т.е. требует большой глубины регулирования. При малых расходах воды насосный агрегат вращается на малой скорости, обеспечивающей поддержание номинального давления, потребляя при этом только то количество электроэнергии, которое необходимо для выполнения технологической задачи. При работе в энергоэффективном режиме экономится не только электроэнергия и ресурс оборудования, но и в зависимости от функции автоматизируемого объекта – вода, тепло. Увеличение ресурса электродвигателя при этом способе регулирования напрямую связано с ресурсом подшипников, который определяется радиальными и осевыми нагрузками и частотой вращения. В общем случае можно пренебречь тем фактом, что при снижении частоты энергетическая составляющая вибрации уменьшается пропорционально квадрату, и в расчете ресурса подшипников учитывать только уменьшение скорости вращения. Именно благодаря регулированию скорости, в среднем в 2,5 – 3 раза, удаётся увеличить межремонтные интервалы насоса и электродвигателя. РАСЧЕТНАЯ ЧАСТЬ Исходные данные для расчета
Исходные данные: Qном. =40 м3 /час; Нном.т.м.=121м; Нст.=113м. Характеристики насоса показаны на Рисунках 3.1, 3.2, 3.3.
Рисунок 3.1 Характеристика H=f(Q).
Рисунок 3.2 Характеристика P=f(Q)
Рисунок 3.2 Характеристика Согласно показанным характеристикам насос имеет следующие номинальные параметры:
Так как магистраль в нашем случае со статическим напором, то ее характеристика имеет следующий вид:
Характеристика магистрали с естественной напорной характеристикой изображена на Рисунке 3.4
Рисунок 3.4 Совместная работа турбомеханизма и магистрали.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ Белорусский Национальный Технический Университет Кафедра: “Электропривода и автоматизации промышленных установок и технологических комплексов”
Группа 107612
КУРСОВАЯ РАБОТА по дисциплине: “АВТОМАТИЗИРОВАННЫЕ ЭЛЕКТРОПРИВОДЫ ТИПОВЫХ ПРОМЫШЛЕННЫХ УСТАНОВОК” на тему: “Автоматизированный электропривод насоса ЭЦВ8-40-125”
Выполнил: Бондарчук Р.М. Проверил: Сидоров В.Г.
Минск 2006 СОДЕРЖАНИЕ ВВЕДЕНИЕ.. 4 1. ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ. 5 2. АНАЛИЗ СИСТЕМ ЭЛЕКТРОПРИВОДА И ВЫБОР РАЦИОНАЛЬНОЙ СИСТЕМЫ ДЛЯ ДАННОГО ТИПА ТПМ... 7 3. РАСЧЕТНАЯ ЧАСТЬ. 13 3.1 Исходные данные для расчета. 13 3.2 Расчет основных параметров насоса и двигателя. 15 3.3 Проверка двигателя по прямому пуску. 16 3.4 Расчет и построение технологических характеристик механизма. 17 3.5 Расчет и построение искусственных характеристик турбомеха-низма при регулировании скорости 21 3.6 Расчет и построение механических и электромеханических характеристик двигателя в режимах технологического регулирования. 24 3.7 Расчет потребления электроэнергии насосным агрегатом с ПЧИН-АД и сравнение его с энергопотреблением при регулировании задвижкой. 30 4 ПРОЕКТИРОВАНИЕ (ВЫБОР) ТИПОВОЙ СХЕМЫ СИЛОВЫХ ЦЕПЕЙ УПРАВЛЕНИЯ СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА ДАННОГО ВИДА ТПМ... 32 ЗАКЛЮЧЕНИЕ.. 43 СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.. 44
Основными потребителями электроэнергии в нашей стране являются производственные предприятия и объекты ЖКХ. Подавляющее количество электроэнергии потребляется электроприводами насосов и вентиляторов. Особенно ярко эта тенденция выражена в секторе ЖКХ. В условиях реформирования ЖКХ, перевода этой отрасли на режим самоокупаемости, возникает острая проблема повышения энергоэффективности этой отрасли, снижения аварийности, повышения качества услуг при одновременном снижении затрат на их предоставление. Без решения этой проблемы невозможна не только эффективная, устойчивая работа городской инфраструктуры систем жизнеобеспечения населения, но и её надёжное, безопасное функционирование. Без энергоэффективной работы предприятий ЖКХ невозможно привлечение инвестиций в эту отрасль, недостижимо улучшение качества жилищно-коммунальных услуг, адресная социальная защита населения при оплате жилищно-коммунальных услуг. Необходим переход на качественно новый уровень предоставления жилищно-коммунальных услуг при снижении нерациональных затрат. Одним из наиболее эффективных методов решения этой комплексной проблемы является внедрение современных систем частотного регулирования электроприводов и систем автоматизации. Именно эти методы позволяют в условиях высокой степени износа материально-технической базы ЖКХ резко повысить энергоэффективность работы, повысить качество предоставляемых услуг и существенно снизить аварийность, высвобождая средства для рефинансирования и планомерного обновления оборудования и капитального ремонта коммуникаций. ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ Насос – гидравлическая машина, в которой энергия привода преобразуется в энергию жидкости. Гидравлическими машинами называются технические устройства, преобразующие механическую энергию привода в механическую энергию жидкости, или, наоборот, механическую энергию жидкости в механическую энергию привода. Функцией повысительных насосных станций является поддержание заданного графика давления в напорном трубопроводе. Насосные станции обычно работают в режимах, которые отличаются от режимов, первоначально заложенных в проект. Насосные агрегаты установлены с учётом максимального расхода, который возникает как при пиковых значениях потребления воды в утренние и вечерние часы, так и в экстремальной ситуации (например, пожар). Если регулирование производительности насосных агрегатов не производится, при минимальном расходе в напорном трубопроводе возникает избыточное давление. Это вызывает:
Согласно теме курсового проекта, рассматриваем автоматизированный электропривод насоса первого подъема ЭЦВ8-40-125 с системой электропривода – преобразователь частоты на базе инвертора напряжения – асинхронный двигатель с короткозамкнутым ротором. Агрегат электронасосный ЭЦВ предназначен для подъема питьевой воды из артезианских скважин с целью осуществления городского, промышленного и сельскохозяйственного водоснабжения, орошения и других подобных работ. Обозначение: ЭЦВ8-40-125, где ЭЦВ – тип электроагрегата; 8 – внутренний диаметр обсадной трубы в дюймах; 40 – номинальная подача, 125 – номинальный напор, Агрегат состоит из асинхронного электродвигателя, и многосекционной центробежной насосной части, соединенных между собой жесткой муфтой. Ротор насоса и ротор электродвигателя вращаются в резинометаллических подшипниках. В днище электродвигателя расположен упорный подшипник, воспринимающий осевую нагрузку. На входе в насосную часть установлена защитная сетка-фильтр, предохраняющая насос от попадания крупных механических частиц. Электродвигатель водозаполненный с короткозамкнутым ротором, с синхронной частотой вращения 3000 об/мин. «Беличья клетка» ротора выполнена из меди. Обмотка статора выполнена водостойким проводом. Охлаждение электродвигателя осуществляется перекачиваемой водой. Агрегат подключается к трехфазной сети 380В, 50Гц через станцию управления и защиты, предохраняющую электродвигатель от работы в нештатных режимах. Подключение производить кабелем ВПВ сечением, соответствующим потребляемому току.
Технические характеристики агрегата:
2. АНАЛИЗ СИСТЕМ ЭЛЕКТРОПРИВОДА И ВЫБОР РАЦИОНАЛЬНОЙ СИСТЕМЫ ДЛЯ ДАННОГО ТИПА ТПМ Для установок сравнительно небольшой мощности (7–10 кВт) задача регулирования успешно решается с помощью системы регулятор напряжения – асинхронный двигатель с короткозамкнутым ротором. В качестве регулятора напряжения часто применяют тиристорный коммутатор (Рисунок 2-1,а). Вентиляторная механическая характеристика нагрузки позволяет обеспечить устойчивую работу электропривода по системе ТК – АД в достаточно большом диапазоне скорости без обратных связей (Рисунок 2-1,б). Обычно изменение технологического режима, в котором участвует регулируемый электропривод, протекает достаточно медленно и не требует от привода высокого быстродействия. Поэтому в качестве регулятора напряжения может быть использован и трехфазный магнитный усилитель МУ, включенный в цепь статора (Рисунок 2-7).
Рисунок 1-6. Схема (а) и механические характеристики (б) системы ТК – АД с вентиляторной нагрузкой на валу.
Рисунок 2-2. Схема системы МУ – АД. Этот аппарат хотя и обладает магнитной инерционностью, однако отличается простотой исполнения и надежностью в работе. Магнитный усилитель с внутренней положительной обратной связью по току (с самоподмагничиванием) работает в режиме, близком к режиму регулятора напряжения. Поэтому механические характеристики такой системы привода аналогичны характеристикам системы ТК – АД. Развитие полупроводниковой техники позволяет в настоящее время реализовать импульсный способ регулирования скорости асинхронного двигателя. На Рисунке 2-3,а приведена принципиальная схема включения асинхронного двигателя с короткозамкнутым ротором с импульсным изменением активного сопротивления его статорной цепи. Тиристорный ключ ТК, замыкаясь на время
Рисунок 2-3. Схема (а) и механические характеристики (б) системы импульсного регулирования сопротивления в статорной цепи. Регулируя скважность Введение отрицательной обратной связи по скорости обеспечивает жесткие характеристики и устойчивую работу замкнутой системы электропривода в требуемом для механизма диапазоне скоростей. Механические характеристики электропривода с обратной связью по скорости показаны на Рисунке 2-3,б сплошными линиями для трех значений задающего напряжения При выполнении системы управления тиристорным ключом на постоянном токе управляющая обмотка ОУ однофазного тахогенератора ТГ соединяется с системой управления тиристорным ключом СУ через согласующий элемент СЭ, который в простейшем случае для нереверсивного привода представляет собой выпрямительный мост. Общим недостатком рассмотренных вариантов регулируемого электропривода является выделение потерь скольжения при снижении скорости в самом двигателе. Эти потери вызывают дополнительный нагрев двигателя и требуют соответствующего завышения установленной мощности двигателя. Вопрос об определении необходимого завышения номинальной мощности будет рассмотрен ниже. В установках, где по условиям эксплуатации допустимо применение асинхронного двигателя с фазным ротором, возможности регулируемого электропривода расширяются. Введение дополнительного сопротивления в цепь ротора позволяет вывести часть потерь скольжения из обмоток двигателя. Благодаря этому снижается необходимое завышение габарита двигателя и появляется возможность расширить диапазон мощностей привода при рассмотренных выше способах регулирования скорости. Например, импульсный способ регулирования окажется более целесообразным применительно к коммутации дополнительного сопротивления в роторной цепи (Рисунок 2-4,а). При этом механические характеристики привода обеспечивают устойчивую работу в достаточно большом диапазоне скоростей при разомкнутой системе электропривода (Рисунок 2-4,б). По своим характеристикам данный способ аналогичен реостатному. Его достоинство по сравнению с реостатным способом – возможность плавного регулирования сопротивления.
Рисунок 2-4. Схема (а) и механические характеристики (б) системы импульсного регулирования сопротивления в роторе.
Для мощных приводов находят применение асинхронные и синхронные двигателя в сочетании с регулируемыми муфтами скольжения. В варианте электропривода с гидромуфтой угловая скорость ведомой полумуфты изменяется за счет изменения подачи жидкости в полости муфты. По экономичности данный способ регулирования аналогичен реостатному. Потери мощности скольжения выносятся при этом из роторной цепи двигателя и выделяются в муфте. Механические характеристики электропривода с гидромуфтой показаны на Рисунке 2-5. Скорость ведомой полумуфты, соединенной с валом механизма, изменяется согласно с его характеристикой и характеристикой муфты.
Рисунок 2-5. Механические характеристики электроприво-да с гидромуфтой.
Наиболее эффективный способ регулирования предусматривает изменение скорости вращения рабочего колеса насоса. Благодаря этому можно обеспечить требуемый напор во всей области регулирования, не ухудшая при этом КПД насоса в сравнении с дросселированием. На рисунке 2-6 показано, как изменяется механическая характеристика насоса в зависимости от частоты вращения электродвигателя.,
Физический принцип действия циркуляционных насосов определяет законы подобия для основных характеристик насоса: производительность насоса Q линейно зависит от скорости вращения колеса, создаваемый при этом напор ΔH зависит от квадрата скорости, и, соответственно, требуемая при этом механическая мощность P зависит от куба скорости. Таким образом, потребление электроэнергии при частотном регулировании пропорционально кубу производительности насоса. Регулирование скорости вращения рабочего колеса насоса возможно с помощью электронных преобразователей частоты, которые обеспечивают качественное управление асинхронными электродвигателями в широком диапазоне изменения частоты. При этом с помощью преобразователя частоты по сигналу от датчика давления, установленного в напорном трубопроводе, можно автоматически изменять частоту вращения рабочего колеса насоса, оперативно реагируя на изменение расхода жидкости и обеспечивая поддержание заданного давления с высокой точностью. Применение преобразователей частоты обеспечивает следующие преимущества по сравнению с другими методами: · эффективное использование асинхронных электродвигателей, дешевых в эксплуатации и ремонте; · КПД электродвигателя во всем диапазоне регулирования максимально соответствует КПД электродвигателя в номинальном режиме; · КПД преобразователя 95 – 98 %, коэффициент мощности около 1,0; · плавный пуск электродвигателя, отсутствие гидравлических ударов; · снижения уровня шума при пуске и работе; · автономная безопасная работа, интеграция в АСУ ТП.
Рисунок 4 даёт сравнение различных методов регулирования производительности насосов с точки зрения потребления электроэнергии. Наибольшая эффективность применения преобразователей частоты проявляется на объёктах с большой суточной, сезонной переменной нагрузкой, расходом, т.е. требует большой глубины регулирования. При малых расходах воды насосный агрегат вращается на малой скорости, обеспечивающей поддержание номинального давления, потребляя при этом только то количество электроэнергии, которое необходимо для выполнения технологической задачи. При работе в энергоэффективном режиме экономится не только электроэнергия и ресурс оборудования, но и в зависимости от функции автоматизируемого объекта – вода, тепло. Увеличение ресурса электродвигателя при этом способе регулирования напрямую связано с ресурсом подшипников, который определяется радиальными и осевыми нагрузками и частотой вращения. В общем случае можно пренебречь тем фактом, что при снижении частоты энергетическая составляющая вибрации уменьшается пропорционально ква
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 260; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.91.223 (0.014 с.) |

 ;
; .
.

 и размыкаясь на время
и размыкаясь на время  , изменяет среднее за цикл коммутации
, изменяет среднее за цикл коммутации  значение дополнительного сопротивления
значение дополнительного сопротивления  . Сопротивление
. Сопротивление 
 (2-16)
(2-16)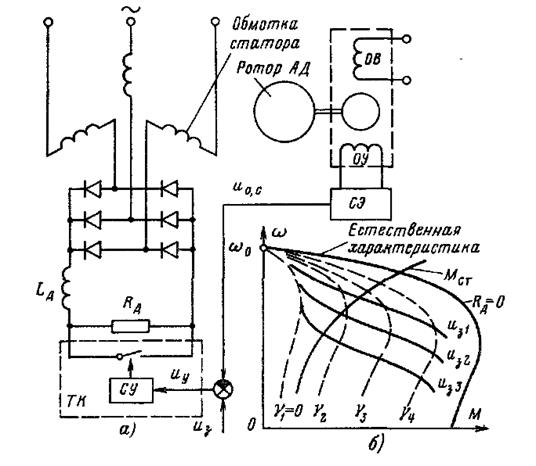
 , можно получить семейство механических характеристик электропривода, изображенных штриховыми линиями на Рисунке 2-3,б, причем
, можно получить семейство механических характеристик электропривода, изображенных штриховыми линиями на Рисунке 2-3,б, причем  при
при  и
и  при
при  . Параметр
. Параметр  на входе системы управления тиристорным ключом СУ. Так как критическое скольжение двигателя уменьшается при увеличении
на входе системы управления тиристорным ключом СУ. Так как критическое скольжение двигателя уменьшается при увеличении  . Регулируемые привода многих механизмов центробежного типа работают в тяжелых условиях окружающей среды, что затрудняет использование коллекторных машин. Поэтому часто в качестве датчика обратной связи по скорости применяются тахогенераторы переменного тока.
. Регулируемые привода многих механизмов центробежного типа работают в тяжелых условиях окружающей среды, что затрудняет использование коллекторных машин. Поэтому часто в качестве датчика обратной связи по скорости применяются тахогенераторы переменного тока.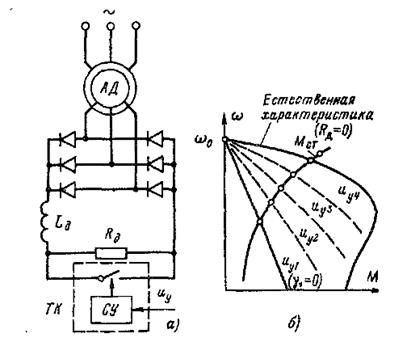


 =f(Q)
=f(Q) – номинальный напор насоса,
– номинальный напор насоса,  ;
; – номинальная подача насоса,
– номинальная подача насоса,  ;
; – номинальный напор магистрали,
– номинальный напор магистрали,  ,
, – статический напор в сети (номинальная высота подъема),
– статический напор в сети (номинальная высота подъема),  .
. .
.



