
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Графічний метод визначення провідності повітряних зазорів.Содержание книги
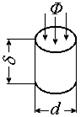
Поиск на нашем сайте Графічний метод застосовують для розрахунку складних форм полюсів. Він точний, але трудомісткий, заснований на побудові картини поля з наступною розбивкою його на елементарні фігури (мал. 5.3). Найбільш часто користуються методом розбивки поля на найпростіші фігури. Метод досить точний для практики і зводиться до наступного. Магнітне поле в повітряному зазорі розбивають на найпростіші геометричні фігури, для яких відомі аналітичні вираження провідностей. Провідність зазору підраховується далі як сума провідностей фігур, на які розбите поле. Наприклад, поле між чотирикутним полюсом і площиною (мал. 5.3) може бути представлене у виді суми наступних найпростіших фігур: паралелепіпеда перетином ab і висотою d; чотирьох чвертей циліндра радіусом d і довжиною утворюючих a і b; чотирьох чвертей порожнього циліндра товщиною m=(1-2) d, внутрішнім радіусом d і довжиною утворюючих a і b; чотирьох (на кутах) половин кульового квадранта радіусом d; чотирьох половин квадранта кульової оболонки товщиною m і внутрішнім радіусом d.
Рис. 5.3. Розбивка поля на найпростіші фігури.
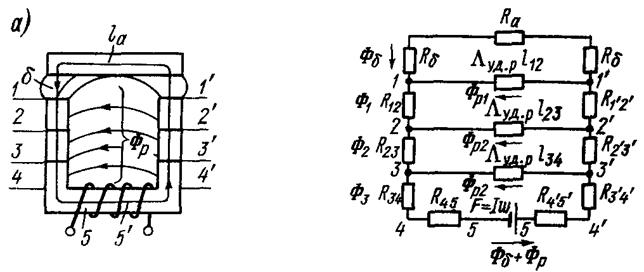
Для зручності розрахунку магнітний ланцюг заміняють еквівалентним електричним ланцюгом, і називають схемою заміщення. У схемі джерело МРС зображується як батарея. Ділянки магнітопровода і повітряні зазори зображуються у виді опорів. Магнітний опір на кожній з ділянок вважають незмінним уздовж ділянки. Розрахунок ведеться за законами Кирхгофа. При розрахунках випливає, що аналогія з електричним ланцюгом тут формальна. В електричному ланцюзі з лінійними опорами залежність I=f(U) прямолінійна. Якщо в магнітному ланцюзі має місце насичення, то залежність Ф = f(F) приймає нелінійний характер. На мал. 5.4а, приведена схема заміщення магнітного ланцюга, що містить повітряний зазор, і зосереджену МРС з урахуванням потоків розсіювання, а на мал. 5.4, б представлена схема заміщення для того ж ланцюга, але з розподіленою МРС.
Рис. 5.4. Схеми заміщення магнітних ланцюгів.
Розподілену МРС зображуємо як ряд батарей, включених послідовно. МРС кожної батареї дорівнює F/n. Потік розсіювання являє собою розподілений потік. Провідність (опір) потоків розсіювання також являє собою розподілену провідність. Зображуємо її як ряд паралельно включених провідностей Gуд.рli, де Gуд.р - питома провідність (провідність на одиниці довжини); li - довжина ділянки. Чим на більше число ділянок буде розбитий магнітний ланцюг, тим точніше буде розрахунок. На мал. 5.4, в приведена схема заміщення розгалуженого магнітного ланцюга без врахування потоків розсіювання. Розрахунок магнітних ланцюгів при постійному струмі. Розрахунок магнітного ланцюга тороида з розподіленою обмоткою. Це найбільш простий випадок нерозгалуженого магнітного ланцюга (мал. 5.5,а).
Рис. 5.5. Тороїд з розподіленою обмоткою
Потоками розсіювання в цьому випадку можна зневажати. Якщо заданий потік Ф і відомо перетин магнитопровода
то можна визначити величину індукції
По кривій намагнічування для даного матеріалу, за значенням індукції В знаходимо напруженість магнітного поля Н (мал. 5.5,б). Тоді шукана м.р.с.
де: l = pD - довжина магнітопровода. Якщо ж задана м.р.с. F, то обчислюють напруженість магнітного поля
і далі по кривій намагнічування знаходять В. При відомому перетині й індукції знаходять потік Ф. Тороїд змінного перетину. Якщо вважати потік незмінним уздовж усієї довжини магнітопровода (мал. 5.6), то
Рис. 5.6. Тороїд змінного перетину.
По заданому потоці знаходимо
а по кривій намагнічування визначимо Н1 і Н2. Падіння магнітного потенціалу на ділянках l1 і l2 будуть H1l1 і H2l2. Шукана м.р.с.
Зворотна задача - визначення потоку Ф по заданій м.р.с. F - не може бути вирішена безпосередньо для розглянутого випадку. М.р.с. витрачається нерівномірно, тому що опір одиниці довжини на ділянках ланцюга різний. Задачу вирішують методом послідовних наближень. Задаються значеннями потоків Ф1, Ф2... Фn і знаходять відповідні їм значення F1, F2... Fn. Будують криву Ф = f(F) (мал. 5.7). За заданим значенням Fз знаходять шуканий потік Фи.
Рис. 5.7. До розрахунку магнітного ланцюга методом послідовних наближень.
Тема 6: Електромагнітні механізми
Механічна і тягова характеристики апаратів.
Переміщенню якоря під дією сили, що розвивається електромагнітом апарата, перешкоджають сили опору. Сумарна сила опору складається з сил контактних пружин (замикаючих контактів), ваги рухливої системи апарата і сил тертя в рухливих деталях. При цьому напрямок сил, створюваних пружинами і вагою рухливої системи, незмінні а сили тертя змінюють напрямок при зміні напряму руху якоря. Під тяговою (електромеханічної) характеристикою електромагніта розуміють залежність сили тяги (чи моменту), що розвивається якорем при заданих ампервитках котушки, що втягує, від величини повітряного зазору. Статичні характеристики залежать від конструкції магнітопровода і ролі струму. Механічні характеристики для прямоходових магнітних систем представляє залежність Ротр = f (d), для систем з поворотним якорем - залежність Мотр= f (a). При включенні електромагніта:
При відключенні сили і моменти тертя змінюють знак:
Тут: Ротр і Мотр - протидіючі сили і моменти; Рпр і Мпр - зусилля, створювані пружинами; G - вага рухливої системи (знак залежить від конструкції); МG - момент від ваги рухливої системи; Ртр і Мтр - сили в момент тертя. Механічна характеристика представляє ламану лінію (мал.22). При максимальному зазорі d1 діють сили тертя 1, вага рухливої магнітної системи 2 і сила пружини, що відключає, 3, що має попереднє стискання. При русі якоря протидіюча сила Ротр плавно зростає за рахунок стискання пружини, що відключає. У момент зіткнення контактів при d2 протидіюча сила Ротр зростає стрибком, за рахунок попереднього стискання контактної пружини 4. При подальшому русі якоря Ротр плавно зростає за рахунок стиску вже двох пружин - що відключає і контактної. Ламана лінія 5 являє собою механічну характеристику апарата й отримана підсумовуванням прямих 1 - 4. Нахил прямих 3 і 4 залежить від жорсткості пружин. На цьому ж малюнку приведена крива 6, що представляє тягову характеристику апарата. Для того, щоб якір почав рух, необхідно, щоб електромеханічна сила була більшою протидіючих сил. Тому тягова характеристика 6 повинна лежати вище механічної характеристики 5. При занадто великій різниці між тяговою і механічною характеристиками виходить велике надлишкове зусилля, а отже, великий приріст кінетичної енергії. У цьому випадку при зупинці рухливої системи кінетична енергія переходить в удар. А удари приводять до зносу апарата. Цю обставину необхідно враховувати при розрахунку характеристик. Крім того, для зм'якшення ударів застосовують гальмові пристрої. Еластичні пристрої виконуються у вигляді опорів зі шкіри, твердої гуми й інших матеріалів в апаратах з невеликим запасом кінетичної енергії.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 465; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.011 с.) |





 ,
, .
. ,
, ,
, .
.
 і
і  ,
, .
.








 ;
при d<3c
;
при d<3c 

 ;
При d<3c
;
При d<3c 








 При d>3c;
При d>3c;  ;
при d<3c
;
при d<3c  (для випадку циліндр - площина величина провідності збільшується в два рази)
(для випадку циліндр - площина величина провідності збільшується в два рази)

 ,
де
,
де  ;
для випадку r1=r2=r u=h/2r.
;
для випадку r1=r2=r u=h/2r.
 ;
; .
. ;
;


