
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Компоненты САПР, основные концепцииСтр 1 из 14Следующая ⇒
Компоненты САПР, основные концепции САПР и ГИС: отличие, сходство, единство Структура программного обеспечения САПР Аппаратное обеспечение САПР Ввод информации в САПР Графические библиотеки в САПР Окна и видовые экраны САПР Основные примитивы САПР (на прим. AutoCAD) Настройка параметров чертежа Системы координат 11. Базовые функции черчения на примере Autocad Управление объектной привязкой 13-16-????????????????????????? Интерполяционные кривые. Цифровые модели местности Регулярные ЦММ Методы построения цифр. моделей местности и их точность Математические модели местности 22. Пространственная триангуляция Делоне Задача построение сети неперекрывающихся треугольников Триангуляция Делоне. Полиномиальные методы Мультиквадриковый способ аппроксимации топогр. поверхн. Методы Kriging 28. метод Inverse Distance. Задачи, решаемые с использованием цифр.математич. моделей Применение цифр. модел. местн. в автоматизир.сист. различн. назначения Современные технологии сбора и обработки топогр. информаци Обработка данных в программном комплексе Credo Построение цифровой модели рельефа по растровой основе 34. Полуавтоматическая векторизация на примере Spotlight. Построения регулярных координатных сеток в GoldenSoft.Surfer Оценка точности постр/ регулярной сетки в Golden Soft. Surfer Использование Faults and Breaklines в Golden Software Surfer. Отображение полученных моделей в Golden Software Surfer. Операции с поверхностями в Golden Software Surfer. Подсчёт объёмов земл. работ котлованов, траншей и насыпей. Площадное камеральное проектирование. Картограмма земляных работ. Проектирование горизонтальной площадки Расчёт объёмов по триангуляции Делоне. Компоненты САПР, основные концепции Деятельность по созданию программных продуктов и технических средств для автоматизации проектных работ имеет общее название - САПР (системы автоматизированного проектирования). Таким образом, любая программа, работающая с компьютерной графикой, так же как и любое приложение, используемое в инженерных расчетах, относится к системам автоматизированного проектирования.
САПР обычно подразумевает использование системы крупных программ, с помощью которых выполняются сложные расчеты, разрабатываются чертежи, выбираются оптимальные варианты технических решений. При этом специализированные программы используются как самостоятельно, так и в комплексе с общетехническими. Компоненты многофункциональных систем САПР традиционно группируются в три основных блока CAD, САМ, САЕ. Модули блока CAD (Computer Aided Designed) предназначены в основном для выполнения графических работ. Наиболее известными CAD-системами являются: AutoCAD, MicroStation, IntelHCAD, CADdy, КОМПАС. CAM – Computer Aided Manufacturing. Общий термин для обозначения системы автоматизированной подготовки производства. Традиционно исходными данными для таких систем были геометрические модели деталей, полученных из систем CAD. Модули САМ предназначены в основном для решения задач технологической подготовки производства. CAE – Computer Aided Engineering – система автоматического анализа проекта. Общий термин для обозначения информационного обеспечения условий автоматизированного анализа проекта, имеет целью обнаружение ошибок или оптимизация производственных возможностей. Модули САЕ предназначены в основном для инженерных расчетов, анализа и проверки проектных решений. САПР – система, объединяющая технические средства, математическое и программное обеспечение, параметры и характеристики которых выбирают с максимальным учетом особенностей задач инженерного проектирования и конструирования. В САПР CAD-системы являются базовыми для создания проектной документации сооружений. Они могут использоваться самостоятельно, в упрощенной форме, когда проектировщик создает отдельные элементы чертежа (примитивы) – такой подход реализует лишь возможности универсальных программ, не привязанных к задачам конкретной отрасли. Крупный эффект достигается при использовании больших программных модулей, относящихся к классу САМ-систем и САЕ-систем. В сфере инженерных изысканий широкое применение получил комплексы, решающие и чисто строительные задачи, связанные с выполнением земляных работ – проекты вертикальной планировки, проектирование дорог и т.д. (CREDO_DAT, CREDO_GEO, ТОПОКАД, ПЛАНКАД, RGS).
В САПР обеспечивается удобство использования программ за счет применения средств оперативной связи инженера с ЭВМ, специальных проблемно-ориентированных языков и наличия информационно-справочной базы. Структурными составляющими САПР являются подсистемы, обладающие всеми свойствами систем и создаваемые как самостоятельные системы. По назначению подсистемы САПР разделяют на два вида: проектирующие и обслуживающие. Проектирующие подсистемы непосредственно выполняют проектные процедуры и операции. Примерами проектирующих подсистем могут служить подсистемы геометрического трехмерного моделирования объектов, изготовления конструкторской документации, схемотехнического анализа, трассировки соединений в печатных платах, подсистема проектирования схемы управления, подсистема технологического проектирования. Обслуживающие подсистемы обеспечивают функционирование проектирующих подсистем, их совокупность часто называют системной средой (или оболочкой) САПР. Типичными обслуживающими подсистемами являются подсистемы управления производственной информацией, как проектными данными, так и процессами разработки (PDM – Product Data Management), управления процессом проектирования пользовательского интерфейса для связи разработчиков с ЭВМ (DesPM – Design Process Management), CASE (Computer Aided Software Engineering) для разработки и сопровождения программного обеспечения САПР, обучающие подсистемы для освоения пользователями технологий, реализованных в САПР, подсистема графического отображения объектов проектирования; подсистема документирования; подсистема информационного поиска и др. Структурное единство подсистем САПР обеспечивается строгой регламентацией связей между различными видами обеспечения, объединенных общей для данной подсистемы целевой функцией. Различают семь видов обеспечения: — техническое (ТО), включающее различные аппаратные средства (ЭВМ, периферийные устройства, сетевое коммутационное оборудование, линии связи, устройства вычислительной и организационной техники, средства передачи данных, измерительные и другие устройства и их сочетания); — математическое (МО), объединяющее математические методы, модели и алгоритмы для выполнения проектирования; — программное (ПО), включающее документы с текстами программ, программы на машинных носителях и эксплуатационные документы; — информационное (ИО), состоящее из документов, содержащих описание стандартных проектных процедур, типовых проектных решений, типовых элементов, комплектующих деталей, материалов и другие данные; вся совокупность используемых при проектировании данных называется информационным фондом САПР; — лингвистическое (ЛО), выражаемое языками общения между проектировщиками и ЭВМ, языками программирования и языками обмена данными между техническими средствами САПР; — методическое (МетО), включающее различные методики проектирования и документы, в которых отражены состав. Аппаратное обеспечение САПР САПР — это не только комплекс программных средств, в которые предприятия делают основные вложения, но и солидная аппаратная база, требующая соответствующего материального обеспечения и на несколько лет определяющая стратегию развития САПР как программного комплекса предприятия.
Внедрение САПР необходимо осуществлять как внедрение программно-аппаратного комплекса, обладающего требуемой функциональностью. На рынке САПР каждый год появляются новинки, которые увеличивают функциональность прикладного ПО; революционные прорывы происходят с периодичностью в 3-4 года. Промежуток между заявлением производителя ПО о новой функциональности и началом квалифицированной работы пользователя с нею может составлять до 12 месяцев. Этот же временной интервал характерен и для оптимизации аппаратных ресурсов под вновь приобретаемое ПО. Вывод: если аппаратный комплекс оптимизировать под существующую функциональность прикладного ПО, а также дать ему некоторый запас прочности, то моральное устаревание комплекса удастся отодвинуть на несколько лет. Попробуем сформулировать основные принципы жизнеспособности аппаратного комплекса: – дифференциация рабочих мест для плоского и трехмерного проектирования; – выделение компьютера или группы компьютеров для реализации функций серверов приложений, данных пользователей, различных групповых сервисов; – организация централизованного резервного копирования информации серверов (обязательно) и отдельных рабочих мест (по степени важности информации); – выделение устройства вывода для индивидуального доступа каждого пользователя; – предварительный расчет нагрузки на ЛВС (локальную вычислительную сеть) и оптимизация трафика; – формирование топологии ЛВС таким образом, чтобы ее надежность была максимальна и не зависела от воздействия внешних факторов; – выделение места для репликации технической документации (до формата А0+) с целью оптимизации нагрузки на устройства вывода информации на бумажные носители; – наличие минимального аппарата администрирования комплекса (инженеров IT). Пользователю доступны практически все типы вычислительных систем, но вопрос о том, какую архитектуру системы выбрать (RISC или CISC), почти всегда однозначно решается в пользу CISC, а если говорить конкретнее — Intel-систем. Преимущества Intel-систем: - распространенность программного обеспечения; - существующий уровень образования конечного пользователя; - несанкционированное использование коммерческих версий программных продуктов;
- отработанная технология ремонта и хорошая ремонтопригодность таких систем. При этом пользователь забывает о том, что такие системы были созданы «для всего» (принцип all-in-one – все в одном). Универсальная системная архитектура позволяет приложениям выполняться как одинаково хорошо, одинаково средне, так и одинаково плохо. Преимущества RISC-системы, как правило с UNIX ОС: - система ориентирована на высокопроизводительные вычисления; - программное обеспечение имеет отработанные алгоритмы, причем именно на основе этих алгоритмов строится программное обеспечение для Intel-систем; - система имеет высокую надежность, что практически сводит к минимуму выход техники из строя; - прикладное программное обеспечение ориентировано на возможности именно этой, конкретной системы; - все имеющиеся программы на этой вычислительной системе выполняются одинаково хорошо. Отказ от принципа all-in-one – (все в одном): если расшифровать данное направление развития вычислительного комплекса, то это может выглядеть следующим образом: - применение процессоров нижнего класса в компьютерах на рабочих местах, предназначенных для 2D-проектирования; - четкое и однозначное формирование комплекса программного обеспечения как для 2D-, так и для 3D-рабочих мест; - применение накопителя на жестких дисках минимально возможной емкости в соответствии с требованиями программного комплекса; - применение RDRAM или DDR RAM в станциях, предназначенных для вычислений в режиме реального времени или визуализации сложных объектов; - применение графических ускорителей 2D на рабочих местах для двухмерного проектирования; - применение графических ускорителей с аппаратной реализацией OPEN GL v1.1 (новый стандарт v1.2) для рабочих мест, предназначенных для 3D-визуализации; - если в вашей системе используются программные продукты Autodesk, то желательно применение Heidi-совместимой графической подсистемы. Вопрос о рабочем месте для обработки двухмерной информации является принципиально важным. Таких компьютеров в системе может быть до нескольких сотен, а стоимость рабочего места существенно влияет на стоимость всего программно-аппаратного комплекса. В то же время удешевление рабочего места не следует проводить в ущерб его функциональности.Определяющей особенностью рабочего места CAD 2D является оптимизация системы для работы с двухмерной графикой. В качестве видеоконтроллера может быть использована любая современная графическая карта с 19-дюймовым монитором с разрешением 1024×768 или 1280×1024 точек разверткой не менее 75 Гц. Данные режимы работы мониторов наиболее удобны для операторов с точки зрения эргономики и психомоторики и являются оптимальными для приложений CAD 2D. Ввод информации в САПР Наиболее распространенный вариант — это ввод информации с бумажных носителей. Сам по себе этот процесс достаточно трудоемкий и, возможно, бывает отягощен плохим качеством бумажных носителей: неравномерность тона бумаги, темные пятна, «размытые» линии. В этом случае применяется профессиональный сканер. Профессиональные сканеры обеспечивают точностные параметры ввода изображения и позволяют конечному пользователю осуществлять первичную цифровую фильтрацию изображений, блок управления сканером может на основе алгоритмов цифровой обработки информации убирать единичные растровые элементы и создавать равномерные закрытые полигоны. Специальные алгоритмы позволяют восстанавливать целостность линий и в некоторых случаях увеличивать их толщину, что необходимо для последующей обработки информации. При этом скорость ввода информации не теряется. Критичными точностными параметрами сканеров являются линейность и относительная погрешность ввода изображения. В этом случае профессиональные сканеры однозначно предпочтительнее устройств SOHO (Small Office Home Application).
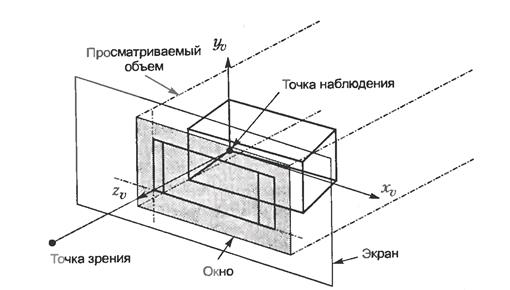
Ввод информации с дизайнерских набросков и эскизов также возможен сканированием бумажных носителей или пленок. Для выполнения эскизов или набросков могут использоваться графические планшеты (дигитайзеры). Посредством стандартного программного обеспечения, поставляемого с планшетами, стала возможна интеграция этих устройств с САПР (например AutoCAD). Наиболее удобный инструмент для ввода этой информации — перо дигитайзера, имеющее вид «обычной» шариковой ручки. В отдельных случаях ввод информации может осуществляться в растровом режиме. Все профессиональные сканеры легко и удобно интегрируются в архивы электронных документов; это одно из основных отличий профессионального оборудования от бытового. Также возможны другие варианты ввода информации: с клавиатуры или манипулятора «мышь», импорт данных из файлов. Последний этап — получение твердой копии объекта. Этот этап техпроцесса заключается в выводе информации на плоттер. Механизм вывода может быть различен, но наиболее эффективным будет организация сервера печати и механизма очередей. Механизм очередей помогает упростить удаленное администрирование сервера печати и справиться с повышенным расходом бумажных носителей, связанным с ошибочным выводом на печать. В проектных организациях, имеющих большой объем печатных работ, при использовании механизма очередей печати целесообразно применять плоттеры с непрерывной подачей чернил. Это связано с тем, что объем танков с чернилами значительно превышает объем картриджей; кроме того, существует возможность пополнения запаса чернил в процессе работы устройства. Окна и видовые экраны САПР Термин окно обозначает область экрана монитора рабочей станции, посредством которого пользователь взаимодействует с вычислительными ресурсами, подключенными к той же сети. Окно (в компьютерной графике) — это область пространства, проецируемая на монитор. Объекты, находящиеся вне окна, на мониторе не появляются. Окно обычно определяется как прямоугольник, лежащий на экране и заданный значениями X и Y в системе координат просмотра. Видимая облазь пространства, называемая просматриваемым объемом (viewing volume), зависит от типа проекции. Для параллельной проекции эта область имеет форму параллелепипеда, а для перспективной — форму пирамиды и.т.д.
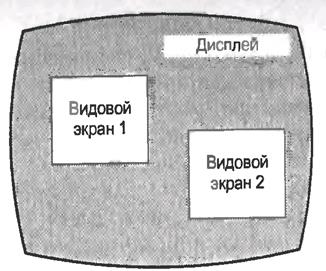
Рис. 3.4. Окно и просма- триваемый объем для параллельной проекции Видовой экран (viewport) — это область экрана, где будет отображаться проецируемое изображение (рис. 3.5). В эту область проецируется просматриваемый объем, определяемый «обычным» окном. Отображение состоит из трансляции и масштабирования Рис. 3.4. Видовые экраны
Основные примитивы САПР (на прим. AutoCAD) Примитивы (primitives) — это элементы графики, которые могут отображаться графической библиотекой. В каждой библиотеке набор примитивов свой.
Основные классы объектов, называемые в AutoCAD примитивами, доступны через панель инструментов «Черчение» или через одноимённый пункт меню. Следует отметить, что в панели инструментов перечислены только основные двумерные примитивы. Отрезок (или линия) является основным графическим объектом AutoCAD. Команда доступна из панели инструментов «Черчение». Команда «отрезок» строит серию отрезков из указанной точки, причем последующие отрезки начинаются из концов предыдущих. За концы отрезок можно растягивать и менять направления, а за центральную – переносить. Указать конечные точки можно либо с использованием двухмерных (х, у), либо трехмерных (х, у, z) координат, либо их комбинации. Если вводятся двухмерные координаты, программа AutoCAD использует текущую высоту в качестве координаты Z точки (по умолчанию координата равняется нулю). Команда «Отрезок» является командой, которая повторяется автоматически. Команда использует конечную точку одного отрезка в качестве начальной точки для следующего отрезка, продолжая выводить подсказки для ввода каждой последующей точки. Каждый отрезок является отдельным объектом, поскольку был нарисован с использованием отдельной команды.Большинство команд программы AutoCAD имеет множество параметров – «ключей». Они могут быть выбраны в контекстном меню. Для команды «Отрезок» доступны три параметра: «Продолжить», «Замкнуть» и «Отменить».Ключ «замкнуть» действует после того, как добавлены минимум два отрезка друг за другом. Команде ПРЯМАЯ. Эта команда позволяет создавать бесконечные линии, которые обычно используются при вспомогательных построениях. Точки как примитивы AutoCAD применяются не так часто. Как правило, их называют также узловыми точками и используют для узловой объектной привязки. При работе со сложными трехмерными моделями точки могут быть полезны для облегчения привязки к труднодоступным местам. Для создания узловых точек в системе AutoCAD предусмотрена основная команда – ТОЧКА. Однако есть еще две команды, которые по определенному закону расставляют новые точки вдоль объекта: ПОДЕЛИТЬ и РАЗМЕТИТЬ. Единицы измерения Пользователь должен выбрать формат и точность единиц измерения расстояний и углов. Единицы измерения расстояний могут быть представлены в научном, десятичном, дробном, инженерном и архитектурном форматах. Единицы измерения углов — это градусы, градусы/минуты/секунды, грады, радианы и геодезические единицы. Размеры чертежа Рисуя чертеж на бумаге, вы не можете выйти за границы листа. Точно так же и при работе с графическим устройством чертеж должен иметь определенные границы, поскольку этот чертеж когда-нибудь все равно будет напечатан на бумаге конечного размера. Значит, пользователь должен заранее установить размеры чертежа. Слои Разбивать чертеж на множество слоев очень удобно, особенно если чертеж достаточно сложный. Распределив группы графических элементов по отдельным слоям, вы значительно упростите себе задачу. Другими словами, выполнять все операции с отдельным слоем значительно проще, чем с большим чертежом, содержащим все объекты. Однако вам нужно иметь возможность переключаться между режимами просмотра, чтобы получить представление об относительном расположении элементов из разных слоев. Разделение на слои сохраняет возможность накладывать их друг на друга, не усложняя при этом чертеж по крайней мере в том, что касается выполняемых графических операций. Слой, с которым вы работаете в данный момент, считается активным, тогда как все остальные слои считаются неактивными. Как и любой другой фон, графические элементы неактивных слоев нечувствительны к графическим операциям, таким как выбор или удаление. Поэтому сложность чертежа остается той же самой, как если бы вы работали с одним-единственным активным слоем. Системы координат Для вывода изображения объекта на экран графического устройства необходимо решить две основные задачи: 1. указать положение всех точек объекта в пространстве; 2. определить положение их образов на мониторе. Для задания положения точек в пространстве и на мониторе используются системы координат. Важно понимать, как связаны между собой различные системы координат. Особенно это важно для проектирования трехмерного объекта на плоский экран. Проекция на экране строится по тем же законам, что и проекция реального объекта на сетчатке человеческого глаза. Первой среди систем координат мы рассмотрим систему координат устройства (device coordinate system), которая определяет положение точки на экране. Эта система состоит из горизонтальной оси u и вертикальной оси v (рис.). Обратите внимание, что начало отсчета может выбираться произвольно. Осей u и v достаточно для задания положения любой точки экрана, поэтому третья ось, перпендикулярная первым двум, не определяется. Положение любой точки задается двумя целыми числами u и v, равными числу пикселов между началом координат и точкой по осям u и v.
Рис. Системы координат устройства
Внешняя, или мировая система координат (world coordinate system), — это опорная система, используемая для описания интересующих нас объектов. Внешней она является по отношению к объектам. Для удобства работы может определяться пользовательская система координат. Также при настройке параметров возможно определить для данного чертежа цвета, типы линий для слоев, их толщину (для печати и отображения на экране), стили текста сетку, привязку к элементам графических примитивов и т.д. Для упрощения данной операции возможно использовать шаблоны файлов.
11. Базовые функции черчения на примере Autocad Рабочий экран AutoСAD имеет вид (здесь приводится экран русской версии AutoCAD. Это сделано для облегчения навигации по рабочему окну).
Рис. Пример главного окна AutoСAD
Рис. Настройка текстовых стилей
Интерполяционные кривые. Для каждого криволинейного ребра в компьютере хранится либо уравнение кривой, либо эквивалентные характеристические параметры. Эти сведения важны как для систем автоматизированной разработки чертежей, так и для систем объемного моделирования. Условно все кривые можно подразделять на: • Апроксимационные • Интерполяционные Задачи построения кривых по точкам возникают в компьютерной графике при проектировании, обработке изображений и распознавании образов. Отыскание кривой, проходящей через заданное множество точек, составляет задачу интерполиро- вания, а отыскание кривой, проходящей вблизи заданного множества точек, – задачу аппроксимации. Для точной передачи кривизны по исходным данным удобнее использовать интерполяционные кривые, а если требуется, заодно, и убрать «шум» в исходных данных, то – аппроксимирующие кривые. Представьте, что вы работаете в системе геометрического моделирования и хотите визуализировать кривую. Кажется естественным передать системе координаты нескольких точек на этой кривой, а затем соединить их плавной линией при помощи средства, называемого сплайном (spline). Так же и в САПР: конструктор указывает точки, а система строит по ним интерполяционную кривую, которую и отображает. Уравнение интерполяционной кривой сохраняется для последующей работы с ней. Можно создать кривую, непосредственно указав задающие точки кривой Безье или В-сплайна. Однако большинство конструкторов предпочитают указывать точки, лежащие на самой кривой, и изменять кривую, перемещая ее характеристические точки. Характеристическими точками могут быть задающие точки кривой Безье или В-сплайна, если интерполяционная кривая относится к одному из этих классов. Возможность строить интерполяционные кривые по точкам очень полезна, если геометрическая модель создается по существующей физической модели. Интерполяционные сплайны. Как известно, термин "сплайн" происходит от названия чертежного инструмента – тонкой металлической или деревянной линейки, которая изгибается так, чтобы проходить через заданные точки (xi, yi = f(xi)). Интерполяционные кривые.
Цифровые модели местности Цифровой моделью местности (ЦММ) называют совокупность точек местности с известными трехмерными координатами и различными кодовыми обозначениями, предназначенную для аппроксимации местности с ее природными характеристиками, условиями и объектами. Кодовые обозначения характеризуют связи между соответствующими точками ЦММ. Математической моделью местности (МММ) называют математическую интерпретацию цифровых моделей для компьютерного решения конкретных инженерных задач. В зависимости от инженерного назначения математической модели для одной и той же Ц М М может быть использовано несколько различных МММ. Конечным результатом инженерных изысканий при проектировании на уровне САПР по этой причине является получение крупномасштабных топографических планов и Ц М М на одни и те же участки местности в единой системе координат. Информационная емкость общей ЦММ при этом существенно больше информационной емкости самых подробных крупномасштабных топографических планов. Ц М М и М М М используют прежде всего для получения необходимой исходной информации для автоматизированного проектирования (продольные профили земли по оси трассы, поперечные профили, инженерно-геологические разрезы и т.д.). Возможности цифрового и математического моделирования позволяют в корне изменить технологию проектирования инженерных объектов и требуют изменения технологии и методов сбора, регистрации и представления исходных данных при изысканиях. Условно цифровые модели местности можно подразделять: • цифровые модели рельефа • цифровые модели ситуации Традиционным способом отображения рельефа на топографических картах является способ горизонталей. Для большей наглядности иногда применяют цветовую градацию высот При цифровом моделировании рельефа и геологического строения местности в зависимости от сложности рельефа, ситуационных особенностей местности, способа производства изысканий, задач проектирования, наличия парка современных геодезических приборов, приборов спутниковой навигации, средств геофизической подповерхностной разведки, средств автоматизации и вычислительной техники могут быть сформированы ЦММ с использованием самых разнообразных принципов.
Регулярные ЦММ Цифровой моделью местности (ЦММ) называют совокупность точек местности с известными трехмерными координатами и различными кодовыми обозначениями, предназначенную для аппроксимации местности с ее природными характеристиками, условиями и объектами. Кодовые обозначения характеризуют связи между соответствующими точками ЦММ. Вопросам разработки различных видов ЦММ было посвящено большое количество исследований. При этом все известные ЦММ можно разбить на три большие группы: регулярные, нерегулярные и статистические. Регулярные ЦММ Регулярные ЦММ создают путем размещения точек в узлах геометрических сеток различной формы (треугольных, прямоугольных, шестиугольных), накладываемых на аппроксимируемую поверхность с заданным шагом. Наиболее часто применяют ЦММ с размещением исходных точек в узлах сеток квадратов (рис. а) или равносторонних треугольников (рис. б). Регулярные ЦММ в узлах правильных шестиугольных сеток (рис. в) нашли применение при проектировании нефтепромысловых дорог в условиях равнинного рельефа Западной Сибири.
Регулярные модели весьма эффективно использовать при проектировании вертикальной планировки городских улиц, площадей, аэродромов и других инженерных объектов на участках местности с равнинным рельефом. Однако опыт использования ЦММ с регулярным массивом исходных данных показал, что требуемая точность аппроксимации рельефа достигается лишь при очень высокой плотности точек местности, которая в зависимости от категории рельефа должна быть в 5—20 раз выше по сравнению с нерегулярными ЦММ. Появление высокопроизводительного оборудования с автоматической регистрацией информации по заданному интервалу длины или времени, тем не менее, делает использование регулярных моделей весьма перспективным.
Триангуляция Делоне. В настоящее время существует множество алгоритмов построения триангуляции Делоне. Многие из известных алгоритмов используют определение триангуляции Делоне как вторичный признак триангуляции. Поэтому в таких алгоритмах отмечаются следующие слабости: – алгоритмы используют постоянно вычисляемые тригонометрические функции, что резко замедляет процесс; – при исследовании взаимоотношения точек и базового отрезка возникают очень малые углы, и при использовании тригонометрических функций постоянно появляется опасность исчезновения порядка и деления на «0» в связи с ограниченной точностью представлений данных в компьютере. Наиболее известные программные продукты строят триангуляцию Делоне, используя теорему о пустом шаре как основной, первичный принцип построения треугольников. Алгоритм выглядит так: – все множество точек делится на треугольники, т.е. создаются комбинации из трех точек; – для каждой комбинации находится описанная окружность и координаты ее центра; – если внутри окружности текущей комбинации не находится ни одной точки из оставшихся то эта комбинация есть треугольник – часть триангуляции Делоне. К достоинствам этого алгоритма можно отнести: – отсутствие использования тригонометрических функций, что не замедляет процесс построений; – непосредственное построение триангуляции Делоне, без каких – либо предварительных построений; – простота всех вычислений и преобразований; – в итоге триангуляционная сетка представлена множеством треугольников, а не отдельных линий.
узлы, ребра, грани и структурные линии, а слева – структурныЗадача построения модели поверхности с учетом структурных линий называется триангуляцией Делоне с ограничениями. Фрагмент триангуляции Делоне с включенными в нее дополнительными элементами приведен на рисунке, где справа показаны линии местности (береговые линии, бровки оврага и др.) и точки с известными отметками.
Располагая пикеты на характерных элементах рельефа (например, водоразделах и тальвегах), мы игнорируем более мелкие элементы в промежутках. При построении горизонталей1 по таким ребрам треугольников возникает ошибка, которая зависит от величины неровности рельефа и угла наклона местности. Например, средняя погрешность съемки рельефа, не должна превышать 1/3 сечения рельефа при углах наклона поверхности от 2 до 10 градусов. Можно рассчитать, что при сечении рельефа 0,5 м предельная величина пропущенной неровности (то есть отклонения поверхности земли от прямой, проходящей через соседние пикеты) не должна превышать (0,5/3)*cos10°=0,16 м. Для точности определения объема перемещаемого грунта важна также площадь, занимаемая не учитываемой деталью рельефа. Допустим, в квадрате 20х20 м между двумя парами пикетов имеется цилиндрическая выпуклость с максимальной высотой 0,15 м. Нетрудно подсчитать, что ее неучет при представлении данной поверхности только двумя треугольниками приведет к ошибке приблизительно в 40 м3. Не так уж много, но для участка в 1 га, расположенного на холме или верхней (как правило, выпуклой) части склона, получится уже 40*25=1000 м3 лишнего грунта. Если же брать пикеты в два раза чаще (то есть через 10 м), ошибка уменьшится вчетверо и составит 250 м3 на гектар. Этот фактор можно учесть заранее, поскольку положительные формы равнинного рельефа обычно имеют выпуклую форму, а отрицательные – вогнутую. Если на подлежащий съемке участок имеются приближенные данные о рельефе, то радиус кривизны поверхности и необходимую густоту пикетов легко рассчитать по величинам заложения горизонталей или отдельным высотным отметкам.
Полиномиальные методы Полиномиальные способы предполагают представление моделируемой поверхности полиномом второй - пятой степени вида
Для отыскания неизвестных коэффициентов полинома для каждой опорной точки составляют одно уравнение поправок вида
где свободный член (Z – ZГ) представляет собой уклонение вычисленной по формуле (5.7) отметки (Z) с приближенными значениям коэффициентов полинома от исходной (ZГ). Полученную систему решают последовательными приближениями, в каждом из которых неизвестные находят методом наименьших квадратов, под условием [pv Кусочно-полиномиальные способы предполагают деление области моделирования на участки, подбор для каждого участка своего локального полинома вида (5.7) и последующую связь локальных полиномов с помощью переходных уравнений. Во всех случаях возникают переопределенные системы, которые решаются под условием минимума суммы квадратов расхождений высот точек реальной и аппроксимирующей поверхностей.
|
|||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 1522; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.25.74 (0.165 с.) |








 ]= min. Найденные таким образом коэффициенты а0...аi уравнений (5.7) используют для интерполяции высот точек, расположенных в области моделирования.
]= min. Найденные таким образом коэффициенты а0...аi уравнений (5.7) используют для интерполяции высот точек, расположенных в области моделирования.


