Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Регулирование пневмоприводовСодержание книги Поиск на нашем сайте
В пневмоприводах в зависимости от назначения регулируются скорость перемещения поршня и усилие на шток. Кроме того в состав привода могут входить элементы, предназначенные для торможения или остановки поршня в нужном положении. Регулирование скорости применяется с целью обеспечения плавного пере-мещения рабочего органа. Она зависит от количества сжатого воздуха, посту-пающего в пневмоцилиндр, и отработанного воздуха, удаляемого из него. Расходы воздуха подбираются дросселями с обратными клапанами. Схема с ручным управлением (рис.52,а) позволяет регулировать скорость перемещения поршня в пневмоцилиндре одностороннего действия с возвратной пружиной.
а) б) Рис. 52 Здесь дроссель установлен на входе в поршневую полость пневмоцилиндра и его настройкой обеспечивается требуемая скорость рабочего хода. При переключении распределителя эта полость через обратный клапан соединяется с атмосферой и поршень под действием пружины совершает быстрый обратный ход. Однако, из-за наличия пружины, создающей неравномерное противодавление по ходу поршня, точно регулировать скорость с помощью этой схемы не удается. На рис.52,б представлена схема регулирования скорости поршня в цилин-дре двухстороннего действия. В этом положении сжатый воздух через обрат-ный клапан свободно проходит в штоковую полость цилиндра, а из поршневой полости осуществляется регулируемый выхлоп через дроссель. При пере-ключении распределителя дросселем создается подпор в штоковой полости. Таким образом обеспечивается плавное перемещение поршня в прямом и обратном направлениях. Благодаря быстрому заполнению полостей пневмо-привод устойчиво работает при изменении внешней нагрузки. Для стабилизации или изменения усилия, развиваемого пневмоприводом, в схему вводят регулятор давления, устанавливаемый, как правило, на входе в рабочую полость.
Рис.53
Сжатый воздух поступает в рабочую полость цилиндра и вызывает переме-щение поршня вправо. Из штоковой полости воздух свободно сбрасывается в атмосферу. В конце рабочего хода срабатывает кулачковый выключатель 1 и выхлоп воздуха заканчивается через дроссель 2, что обеспечивает торможение поршня. Для перемещения поршня влево переключается распределитель 4 и сжатый воздух направляется в штоковую полость цилиндра сначала через обратный клапан 3, а после повторного срабатывания под действием пружины выключателя 1 – по основной линии.
Элементы пневмоприводов В состав пневмоприводов, как и гидроприводов, входят исполнительные механизмы (поршневые, плунжерные, мембранные и сильфонные пневмо-двигатели возвратно-поступательного движения, поворотные двигатели и пневмомоторы), распределительные устройства с ручным, электромехани-ческим и пневматическим управлением (золотниковые, клапанные, крановые), управляющие устройства, обеспечивающие переключение распределителей в соответствии с требуемой последовательностью технологических операций, пневмопреобразователи, пневмоусилители, датчики состояния, например, рассмотренные выше конечные переключатели, задатчики закона движения исполнительного механизма, например, дроссели. Конструктивно многие элементы аналогичны применяемым в гидроприводах. Источником сжатого воздуха в пневмоприводах являются компрессоры поршневого и пластинчатого типа.
Рис. 54 (delivery – нагнетание; induction – всасывание; water jacket – водяная рубашка; clearance volume – мертвый объем; stroke volume – объем, описываемый поршнем)
На рис.55 в p-v -диаграмме изображены обратимые процессы изотер-мического (1-2) и (адиабатного 1-2') сжатия. В первом случае абсолютная величина потребляемой компрессором удельной работы, если считать сжимаемый газ идеальным, равна
а во втором
В действительности сжатие газа сопровождается теплообменом со стенками цилиндра и может быть описано политропой с переменным показателем. Вначале, когда тепловой поток направлен от стенок цилиндра к свежей порции газа, n> k, а в конце процесса сжатия, когда меняется направление теплового потока, n< k. Работу компрессора в этом случае рассчитывают по среднему показателю политропы. Дополнительное влияние на характер процесса оказывает тепло трения.
Потери в реальных компрессорах учитываются изотермическим КПД при интенсивном охлаждении цилиндра или адиабатическим КПД, если оно отсутствует. Для промышленных компрессоров hиз =0,5-0,8; hад =0,82-0,85. Работа, потребляемая неохлаждаемыми компрессорами, может быть уменьшена переходом на двухступенчатое сжатие с охлаждением газа в межступенчатом теплообменнике до исходной температуры. Наглядно это иллюстрируется рис.55, где экономия работы изображается заштрихованной площадкой.
 
  Рис. 55 Рис. 55
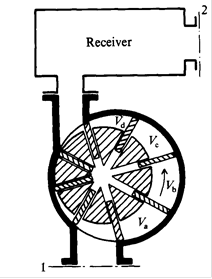
На рис.56 схематично изображен объемный пластинчатый компрессор. Он состоит из ротора, расположенного экцентрично в корпусе и опирающегося на подшипники. В пазы ротора вставлены подвижные пластины, изготавливаемые из антифрикционных материалов. Когда пластина проходит всасывающее окно, начинается сжатие газа вследствие уменьшения объема между ротором и корпусом компрессора. После открытия нагнетательного окна сжатый газ выталкивается в ресивер.
Рис.56
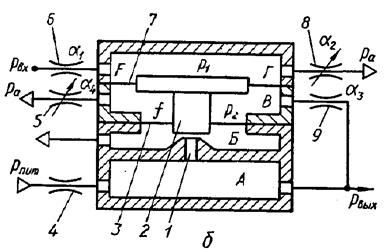
Производительность пластинчатых компрессоров достигает 150 м³/мин, а отношение давлений в специальном исполнении – до 20. Схема управления пневмоприводом с контролем по давлению приведена на рис.57. Оно обеспечивается клапаном, срабатывающим по достижении заданного давления или разности давлений в полостях.
y 3 1
4
Рис. 57
В исходном положении нижняя полость клапана 1 и поршневая полость пневмоцилиндра 2 соединены через распределитель 3 и дроссель 4 с атмо-сферой. В верхнюю полость клапана и штоковую полость пневмоцилиндра поступает сжатый воздух. Поршень находится в крайнем левом положении, а канал управления у, который дает команду на выполнение следующей опе-рации, перекрыт, так как объект 5 не зажат. При переключении распределителя сжатый воздух поступает в поршневую полость цилиндра, поршень передвигается вправо и зажимает объект. Одновременно падает давление в верхней полости клапана и растет в нижней. Когда разность давлений станет достаточной для преодоления усилия пружины клапана, управляющий канал открывается и подается команда на выполнение следующей операции. С аналогичной целью может использоваться пневмоклапан, показанный на рис.58. При подаче воздуха в полость 11 мембрана 10 перекрывает сопло 9, отсекая рабочую полость 2 от атмосферной линии. Через регулируемый дрос-сель 1 она и емкость 8 наполняются воздухом. Одновременно через дроссель 3 воздух поступает в полость 4, создавая противодавление. Через некоторое время давление в рабочей полости становится достаточным для перемещения поршня с заслонкой на штоке. Полость 4 быстро опорожняется, шток “выстре-ливает” и переключает распределитель 5, на выходе которого появляется сигнал управления у. В конце хода поршень перекрывает щель 6 и полость 4 герметизируется. Для подготовки клапана к повторному срабатыванию достаточно снять давление на входе. Откроется сопло 9 и опорожнится емкость 2. Под действием пружины распределителя 5 поршень вернется в исходное положение. Изменение времени появления управляющего сигнала достигается подбором объема емкости 8 и настройкой дросселя 1.
Пневмопреобразователи выполняются по принципу компенсации пере-мещения чувствительного элемента или компенсации усилия на него, которые преобразуются в пропорциональное давление воздуха. К первой группе относятся рассмотренные в гидроприводе преобразова-тели типа сопло-заслонка, имеющие близкие к линейным характеристики. Представителем второй группы является преобразователь, изображенный на рис.60.
Рис. 60
Он состоит из нерегулируемого дросселя 4, через который воздух от источ-ника питания с давлением р1 поступает в междроссельную камеру 5, управ-ляемого дросселя 2 с заслонкой 1, смонтированной на эластичной мембране 3, защемленной в корпусе преобразователя. Обычно мембраны изготавливают из прорезиненной ткани или металлизированного найлона. Входным сигналом преобразователя является усилие х, приложенное к центру мембраны. Компенсация этого усилия осуществляется давлением р2 находящегося в камере 5 воздуха, которое пропорционально перемещению заслонки. Воздух с этим давлением направляется в распределитель пневмодвигателя. Дискретный усилитель мембранного типа изображен на рис.61. Он сос-тоит из камер А,Б,В, разделенных мембранами 4 и 2. Жесткие центры мембран связаны втулкой 3 и являются одновременно заслонками сопел 1 и 6. Пружина 5, настраиваемая на определенный порог срабатывания, прижимает мембран-ный блок к соплу 1, питаемому сжатым воздухом с давлением р1. Воздух с давлением р2, подлежащим усилению, подводится в камеру Б. Выходная линия усилителя с давлением р3 через сопло 6 и камеру В связана с атмосферой. При отсутствии входного сигнала заслонка под действием пружины перекрывает сопло 1 и воздух в выходную линию не поступает. Когда давление р2 превышает порог чувствительности мембраны, открывается сопло 1 и перекрывается сопло 6. Происходит усиление входного сигнала вплоть до давления питания р1.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 2091; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.199.179 (0.012 с.) |



















































 Схема автоматического торможения поршня приведена на рис.53.
Схема автоматического торможения поршня приведена на рис.53.

 2 3
2 3 Конструкции поршневых компрессоров простого (а) и двойного (b) действия, представленные на рис.54, во многом напоминают паровые машины, но рабочие процессы в них имеют противоположное направление.
Конструкции поршневых компрессоров простого (а) и двойного (b) действия, представленные на рис.54, во многом напоминают паровые машины, но рабочие процессы в них имеют противоположное направление.

















 р1 1
р1 1






 2 5
2 5

































 Управление может также осуществляться с контролем по перемещению. Кроме приведенных выше примеров с конечными выключателями, к этой группе относятся приводы с кулачковыми переключателями каналов пнев-мораспределителей и шифраторами с кодирующим диском или перфокартой (рис. 59).
Управление может также осуществляться с контролем по перемещению. Кроме приведенных выше примеров с конечными выключателями, к этой группе относятся приводы с кулачковыми переключателями каналов пнев-мораспределителей и шифраторами с кодирующим диском или перфокартой (рис. 59).