
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Спеціальності 6.092100 «Теплогазопостачання і вентиляція»Содержание книги
Поиск на нашем сайте Спеціальності 6.092100 «Теплогазопостачання і вентиляція»
Рівне – 2006 Методичні вказівки до лабораторних робіт з дисципліни „Автоматизація систем теплогазопостачання і вентиляції” для студентів спеціальності 6.092100 “Теплогазопостачання і вентиляція” / О.Ф. Кінчур - Рівне: НУВГП, 2006, – 36 с.
Упорядник: О.Ф. Кінчур асистент кафедри електротехніки і автоматики.
Відповідальний за випуск Б.О.Баховець, професор, академік УЕАН завідувач кафедри електротехніки і автоматики.
© О.Ф. Кінчур, 2006 ©НУВГП, 2006
Зміст
Лабораторні заняття
Лабораторна робота. №1 Дослідження первинних вимірювальних перетворювачів Мета роботи Ознайомитися з конструкцією і принципом дії первинних вимірювальних перетворювачів температури, деформації, кутового і лінійного переміщення, частоти обертання.
1.2. Експериментальна частина. Об'єкти дослідження В лабораторній роботі досліджуються: - потенціометричний перетворювач кутового переміщення; - диференційно-трансформаторний перетворювач лінійного переміщення.; - вимірювальний перетворювач частоти обертання; - тензометричний перетворювач деформації; - термометричний перетворювач температури. Дослідження потенціометричного перетворювача кутових переміщень Ознайомитися із схемою, рис. 1.1., дослідної установки
Рис. 1.1. Схема установки для дослідження потенціометричного ПВП Таблиця 1.1.
Ввімкнути вимикачем SA1 живлення потенціометра RP під єднавши вольтметр PW. Поставити перемикач SА2 в положення RH=10МОм. змінюючи положення ковзаючого контакту від "0" до "300" через кожні 30° (1 поділка =3°), записати значення кута α і вихідної напруги Uвих в таблицю 5.1. Досліди, повторити при навантаженні RH=1 кОм (поставити вимикач SА2 в положення RH=1 кОм). Після закінчення досліду вимкнути SА1.
Дослідження тахометричного перетворювача частоти обертання
Рис. 1.2. Схема установки для дослідження тахогенератора
Повернути ручку регулювання напруги автотрансформатора Т проти годинникової стрілки до кінця і ввімкнути напругу живлення вимикачем SАЗ. Приєднати вольтметр рV. Змінюючи напругу живлення двигуна Д який обертає тахогенератор, записати значення частоти обертання по приладу Pn і вихідну напругу тахогенератора Uвих. в таблицю 1.2. Дослід провести при збільшенні і зменшенні частоти обертання. Таблиця 1.2.
Після закінчення досліду вимкнути напругу живлення автотрансформатора Т.
Дослідження диференційно-трансформаторного перетворювача лінійних переміщень. Ознайомитися із схемою рис 1.3., дослідної установки
Рис. 1.3. Схема установки для дослідження диференційно-трансформаторного ПВП.
Вимикачем SА4 ввімкнути напругу живлення обмотки збудження перетворювача В. Приєднати вольтметр РV. Переміщуючи плунжер від нейтрального положення “0” в напрямку додатних значень +l через 2 Таблиця 1.3.
Аналогічні вимірювання провести в напрямку -l. Після закінчення досліду вимкнути напругу живлення.
Зміст звіту Звіт повинен мати титульну сторінку, схему дослідної установки, таблиці з результатами досліджень і графіки статичних характеристик. Лабораторна робота №2 Мета роботи 1. Вивчити основні вимірювальні кола автоматики; 2. Ознайомитись з будовою і принципом дії автоматичного електронного моста, автоматичного електронного компенсатора і автоматичного приладу з диференційно-трансформаторним датчиком; 3. Провести дослідження роботи моста, компенсатора і приладу з диференційно-трансформаторною схемою.
Опис лабораторної установки Лабраторна установка являє собою стенд, на якому змонтовані прилади типу КСМ, КСП і КСД. Для подачі вхідного сигналу на прилади КСМ і КСП використаний універсальний прилад типу УПИП. Для подачі вхідного сигналу на КСД застосовується диференційно-трансформаторний перетворювач, який дозволяє вручну змінювати положення стального осердя. Зовнішній вид лабораторного стенду показаний на рис. 2.1, де позначено
Рис. 2. 1 - прилад типу КСМ; 2 - прилад типу КСП; 3 - прилад типу КСД; 4 - прилад типу УПИП; 5 -Диференційно-трансформаторний перетворювач.
Лабораторна робота №3 Мета роботи Ознайомлення з будовою та призначенням регулятора МІК - 21.
Програма роботи 3.2.1. Вивчити будову та призначення регулятора МІК-21; 3.2.2. Вивчити рівні конфігурування і настроювання регулятора; 3.2.3. Зняти перехідні характеристики регулятора з П, ПІ та ПІД законами керування.
Порядок виконання 3.4.1. Вивчити будову та призначення регулятора МІК-21: – оглянути прилад та з’ясувати призначення всіх елементів на передній панелі; – оглянути клемно-блочне з’єднання та задню частину приладу та визначити порядок підключення давачів, ВМ та живлення; – визначити призначення джемперів на платі регулятора та на платі клемно-блочного з’єднання; – в процесі вивчення для більш детального розуміння використовувати „Руководство по эксплуатации универсального микропроцессорного регулятора МИК-21-04”. 3.4.2. Вивчити рівні конфігурування і настроювання регулятора: – візуально оглянути стенд і перевірити справність всіх єлектричних з’єднань, у випадку виявлення будь-яких пошкоджень повідомити про це викладача; – подати живлення на лабораторний стенд; – використовуючи „Руководство по эксплуатации универсального микропроцессорного регулятора МИК-21-04” зайти в режим конфігурування та визначити основні параметри настроювання регулятора. 3.4.3. Зняти перехідні характеристики регулятора з П, ПІ та ПІД законами керування: – відключити живлення від нагрівального елемента; – подати живлення на лабораторний стенд; – в режимі конфігурування встановити структуру регулятора - із аналоговим виходом; – встановити по черзі значення коефіцієнтів Кп, Ті, Тд відповідно: для П-регулятора – Кп=2, Ті=0, Тд=0 для ПІ-регулятора – Кп=2, Ті=10, Тд=0 для ПІД-регулятора – Кп=1, Ті=10, Тд=10 – перейти в робочий режим; – встановити вихід регулятора на позначі 50% шкали; – стрибкоподібно змінити розузгодження регулятора (завдання або регульований параметр) на 10 – 20 %; – вмикнути секундомір – зняти перехідну характеристику для П – закону та занести значення в таблицю 3.1. Таблиця 3.1.
– зняти перехідну характеристику для ПІ – закону та занести значення в таблицю 3.2. Таблиця 3.2.
– зняти перехідну характеристику для ПІД – закону та занести значення в таблицю 3.3. Таблиця 1.3.
Використовуючи значення таблиць 3.1, 3.2, 3.3 на міліметровому папері побудувати криві перехідних процесів для кожного закону регулювання.
Зміст звіту. Звіт повинний містити наступні матеріали (розділи): 1. Мета роботи. 2. Програму та порядок виконання роботи. 3. Функціональну схему АСР і короткий опис установки. 4. Коротку характеристику регулятора: призначення, число каналів, параметри настроювання. 5. Привести коротку характеристику нормуючого перетворювача БПО-32. 6. Короткий опис роботи в ручному режимі, вказати відмінність ручного режиму від автоматичного. 7. Описти порядок конфігурування регулятора МІК-21 та привести перелік основних рівнів настроювань. 8. Привести графіки перехідних процесів для кожного дослідженого закону та показати на них всі встановлені коефіціенти. 9. Висновок. Лабораторна робота №4 Мета роботи 4.1. Вивчити методику експериментального дослідження статичних і динамічних характеристик об’єкту регулювання. 4.2. Навчитись експериментально визначити основні параметри об'єкту.
Теоретичні відомості Об’єктами автоматичного регулювання називають машини, апарати, технологічне обладнання або їх - сукупність, яким потрібна спеціально організована зовнішня дія для їх функціонування за заданим алгоритмом. В загальному вигляді об’єкт автоматизації характеризується функціональною залежністю
Рис. 4.1. Схематичне зображення об’єкту автоматичного регулювання
Вихідна величина Хвих характеризує стан регульованого параметру /температура, тиск, рівень, густина, концентрація, вологість і інше/ об'єкту. Вхідна величина Хвх характеризує кількість енергії чи речовини, яка необхідна для забезпечення заданого значення регульованого параметру з врахуванням дії збурення F і завади f, які обумовлюють зміну регульованого параметру - це зміна навантаження об'єкту, втрати енергії, сировини за рахунок порушення герметичності і інше. До завад відносять дію не передбачуваних зовнішніх факторів, наприклад, зміна температури оточуючого середовища, зміни напрямку і швидкості вітру, зміни вологості і таке інше. Кількісно Хвх формується спеціальними самодіючими засобами керування - регуляторами. Властивості об’єктів автоматичного регулювання /ОР/ описуються певними рівняннями в статичному /статична характеристика/ динамічному /перехідна характеристика/ режимах. Статична характеристика об'єкту являє собою залежність
де Якщо статична характеристика нелінійна, то при малих відхиленнях вихідної величини може бути лінеаризована, тоді
Перехідна характеристика об'єкту являє собою графік зміни вихідної /регульованої/ величини Хвих в часі, якщо на вхід подається дія одиничної функції Хвх=1(t). Загальний вигляд перехідних характеристик для типових об’єктів наведено на рис. 4.2. З перехідної характеристики об’єкту визначають важливий параметр – сталу часу Т, яка характеризує інерційні властивості об’єкту. Стала часу Т характеризує час, за який вихідна величина Хвих досягла би нового усталеного значення, якби швидкість зміни була постійною. Практично Т дорівнює часу, який відсікає на осі проекція дотичної до перехідної характеристики між лініями Хвих при t=0 і Хвих при t=∞ в момент зміни /стрибка/ вхідної величини /рис. 4.2а/ або до точки перегину /рис. 4.2 б і в/. Якщо вхідна величина змінюється стрибком від Хвх=0 до номінального значення Хвх.ном, то таку перехідну характеристику називають кривою розгону /рис. 4.2./. З кривої розгону визначають час розгону об’єкту τр, транспортне τтр, перехідне τп, і повне τз запізнення, а також сталу часу Т. Методику визначення τр, τтр, τп, τз і Т показано на рис. 4.2. Перехідний процес вважається закінченим, якщо Хвих = 0,97Хвих.уст. Динамічні властивості об’єкту описуються диференційними рівняннями, передаточними функціями і частотними характеристиками, які в лабораторній роботі не розглядаються і вивчаються а теоретичному курсі. Технологічний процес в об’єкті регулювання завжди зв’язаний з притоком, накопиченням, перетворенням і витратою енергії або речовини. Здатність об’єкту до накопичення енергії чи речовини називають акумулюючою здатністю і її оцінюють коефіцієнтом ємності об’єкту Кс, який дорівнює кількості енергії чи речовини, що вводиться а об’єкт для зміни керованого параметру на одиницю його вимірювання.
Соб – ємність об’єкту; Хвих.зд - задане значення керованого або регульованого параметру.
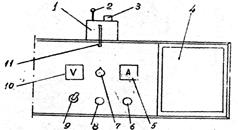
Рис. 4.2 Криві розгону об’єктів: а- інерційний об’єкт без запізнення; б- інерційний об’єкт із перехідним запізненням; в- інерційний об’єкт із перехідним і транспортним запізненням. Експериментальна частина 4.3.1. Ознайомитись з електричною схемою дослідної установки /рис. 4.1./, віднайти усі елементи схеми на передній панелі лабораторної установки /рис. 4.2./. 4.3.2. Перевірити наявність води в бачку 1 по покажчику рівня II /рис. 4.2./ і, якщо рівень менший допустимого /червона риска на покажчику II/, - долити води і її рівень L, записати в таблицю 4.1a. 4.3.3. Дослідити криву розгону /динамічну характеристику /об'єкту. Для цього повернути ручку автотрансформатора Т проти годинникової стрілки до обмеження, встановити пристрій натягу діаграмної стрічки, увімкнути SА, живлення приладу КСМ та приводу діаграмної стрічки, переконатись, що прилад показує і реєструє і в момент переходу пера через лінію відміток часу вимкнути SА, повернути ручку регулювання напруги автотрансформатором за годинниковою стрілкою до обмеження, увімкнути SА Початкове значення температури Тп, величину напруги U і струму І живлення нагрівального елемента, масштаби температури mТ і швидкості mv, діаграмної стрічки записати в таблицю 4.1а. Після закінчення перехідного процесу значення кінцевої температури Тк записати в таблицю Іа. 4.3.4. Встановити. U=0, вимкнути SА, відрізати діаграмну стрічку і приступити до обробки даних експерименту.
Рис. 4.1. Принципова електрична схема лабораторної установки: ОР - об’єкт регулювання, ЕН - електронагрівач, RК - терморезистор, рS - показуючий і реєструючий прилад типу КСМ.
Рис. 4.2. Лицева панель лабораторної установки: 1 – об’єкт регулювання /ОР/; 2 – терморезистор; 3 - електронагрівач; 4 - вимірювальний прилад; 5 – амперметр; 6 – запобіжник; 7 - автотрансформатор; 8 - лампа сигнальна; 9 - вимикач живлення; 10 – вольтметр; 11 - показчик рівня води в бачку. Таблиця 4.1а
Лабораторна робота №5 Дослідження АСР температури Мета роботи Дослідити замкнуту систему автоматичного регулювання температури, вибрати оптимальні параметри настроювання регулятора та дослідити якість перехідного процесу
Порядок виконання роботи Зміст звіту. 1. Мета роботи. 2. Програма та порядок виконання роботи. 3. Функціональна схема АСР і короткий опис установки. 4. Структурні схеми найпоширеніших алгоритмів керування. 5. Привести графіки перехідних процесів для кожного дослідженого закону та алгоритму та показати на них показники регулювання. 6. Висновок. Лабораторна робота №6 Мета роботи Дослідити автоматизовану систему керування технологічним процесом регулювання температури. Опис лабораторної установки Автоматизована система керування технологічним процесом має трьох рівневі структуру (рис 6.1). На першому рівні знаходяться давачі параметрів технологічного процесу та виконавчі пристрої, на другому рівні – керуючі контролери та регулятори, а на третьому – АРМи з людино-машинним інтерфейсом.
Рис. 6.1. Трьох-рівнева структура АСКТП
Людино-машинний інтерфейс даної АСР розроблено в SCADA системі TRACE MODE. Для зв’язку регулятора МІК-21 із даним програмним продуктом використано технологію ОРС (рис 6.2).
Рис. 6.2. Порядок зв’язку регулятора МІК-21 та СКАДА системи Технологія зв'язування і впровадження об'єктів для систем промислової автоматизації OPC (OLE for Process Control) призначена для забезпечення універсального механізму обміну даними між датчиками, виконавчими механізмами, контролерами, пристроями зв'язку з об'єктом і системами представлення технологічної інформації, оперативного диспетчерського керування, а також системами керування базами даних. Для конфігурування «сервера» надається окрема програма MOPC.EXE, за допомогою якої користувач має можливість візуально спланувати конфігурацію «сервера», що являє собою двохрівневу структуру Після конфігурації і настроювання сервера отримано наступну структуру (рис. 6.3)
Рис. 6.3. Конфігурація ОРС сервера
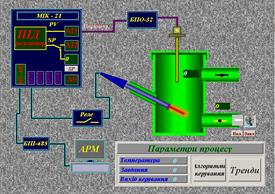
Скада система TRACE MODE SCADA- системаTrace Mode призначена для розробки великих розподілених АСУ ТП широкої сфери застосування. Trace Mode – заснована на інноваційних, що не мають аналогів, технологіях. Серед яких: розробка розподіленої АСУТП як єдиного проекту, автопобудова, оригінальні алгоритми обробки сигналів і керування, об'ємна векторна графіка мнемосхем, єдиний мережевий час. Trace Mode – це перша інтегрована SCADA- і softlogic-система, що підтримує наскрізне програмування операторських станцій і контролерів за допомогою єдиного інструменту. Проект в Trace Mode розробляється в двох програмах: -редактор бази каналів; - редактор представлення даних. В редакторі бази каналів Trace Mode створюється математична основа системи керування: описується конфігурація всіх робочих станцій, контролерів і пристроїв зв’язку з об’єктами, узгоджуються інформаційні потоки між ними. В редакторі представлення даних Trace Mode створюється людино-машинний інтерфейс для автоматизованих робочих місць операторів і технологічного персоналу АСУ ТП. Для реалізації проекту автоматизації створено 1 вузол: - ARM – автоматизоване робоче місце Головне вікно бази каналів має наступний вигляд: Канали для зв'язку з OPC-сервером створюються процедурою автопобудови. Мнемосхема технологічного процесу регулювання температури розроблена в редакторі представлення даних TRACE MODE має вигляд рис. 6.4.
Рис. 6.4. Екран “мнемосхема” Екрани з графіками вміщують в собі графіки основних параметрів технологічного процесу. Один з них має вигляд рис. 6.5.
Рис. 6.5. Графіки ходу процесу регулювання температури Порядок виконання роботи 1. Візуально оглянути лабораторну установку. Вияснити призначення кожного її елемента. Підключити блок БПІ-485 до СОМ порта комп’ютера через відповідний кабель. В разі відсутності видимих ушкоджень за згодою викладача подати живлення на лабораторний стенд ввімкнувши вимикач SA1. На ПЕОМ запустити на виконання сконфігурований ОРС сервер натиснувши в меню відповідну кнопку (Головне меню\Програми\ \Microl\ModBus OPC Server\Конфігурація сервера). Через меню Файл даної програми виконати команду Зробити активним і у вікні, що відкриється вибрати файл ОРС.ocf. Крім того необхідно запустити Редактор представлення даних СКАДА системи ТРЕЙС МОУД. В цій програмі відкрити файл проекту ОРС1.сtm. Повинні з’явитися вікна з мнемосхемою та графіками з параметрами технологічного процесу (рис. 6.4, 6.5) Запустивши команду 2. На основі коефіцієнтів τд, К0 та Т об’єкта регулювання використовуючи відповідні формули розрахувати оптимальні параметри настроювання для процесу з 20% перерегулюванням та з мінімальним часом регулювання. 3. Перевести регулятор МІК-21 в автоматичний режим роботи, для чого натиснути на його передній панелі клавішу [Р/А] (індикатор РУ почне мигати) та підтвердити дію натиском клавіші [Ã] (індикатор РУ погасне, що свідчить про автоматичний режим роботи). В графічному вікні ТРЕЙС МОУД „ Алгоритми регулювання ” вибрати пункт „ ПІД-ШІМ ”. У вікні настроювання параметрів регулятора встановити коефіцієнти, що відповідають оптимальним. Переконатися, що система вийшла в усталений режим. після чого стрибкоподібно змінити сигнал завдання регулятора (SP). Зміну сигналу завдання можна проводити як з передньої панелі регулятора так і у вікні СКАДА системи. В СКАДА системі у рядку завдання встановити значення температури на 30 В одному з графічних вікон ТРЕЙС МОУД спостерігати перехідний процес зміни температури в об’єкті керування до виходу його в усталений режим. 4. Розглянути властивість архівування даних в ТРЕЙС МОУД.
Зміст звіту. 1. Мета роботи. 2. Програма та порядок виконання роботи. 3. Привести склад досліджуваної АСКТП та призначення всіх її складових. 4. Описати призначення кожного графічного вікна. 5. Привести графіки перехідних процесів отримані в графічному вікні „параметри процесу”. 6. Висновок.
спеціальності 6.092100 «Теплогазопостачання і вентиляція»
Рівне – 2006 Методичні вказівки до лабораторних робіт з дисципліни „Автоматизація систем теплогазопостачання і вентиляції” для студентів спеціальності 6.092100 “Теплогазопостачання і вентиляція” / О.Ф. Кінчур - Рівне: НУВГП, 2006, – 36 с.
Упорядник: О.Ф. Кінчур асистент кафедри електротехніки і автоматики.
Відповідальний за випуск Б.О.Баховець, професор, академік УЕАН завідувач кафедри електротехніки і автоматики.
© О.Ф. Кінчур, 2006 ©НУВГП, 2006
Зміст
Лабораторні заняття
Лабораторна робота. №1
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 577; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.117.172 (0.014 с.) |




 3 мм записати покази вольтметра pV і l в таблицю 1.3.
3 мм записати покази вольтметра pV і l в таблицю 1.3.
 між вихідною Хвих і вихідною Хвх фізичними величинами при наявності збурення і завади F.
між вихідною Хвих і вихідною Хвх фізичними величинами при наявності збурення і завади F.
 (4.1)
(4.1) К - коефіцієнт перетворення.
К - коефіцієнт перетворення. (4.2)
(4.2)





 переконатися, що зв’язок з регулятором встановився коректно про що свідчитиме відсутність повідомлень про помилки та правильність відображення значень технологічних параметрів.
переконатися, що зв’язок з регулятором встановився коректно про що свідчитиме відсутність повідомлень про помилки та правильність відображення значень технологічних параметрів. 50º більшим від попереднього.
50º більшим від попереднього.


