Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Національний університет харчових технологійСодержание книги Поиск на нашем сайте
НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ХАРЧОВИХ ТЕХНОЛОГІЙ
МАШИНИ-АВТОМАТИ,ПОТОКОВІ ЛІНІЇ ТА РОБОТОТЕХНІЧНІ КОМПЛЕКСИ (МАЛ ТА РТК)
МЕТОДИЧНІ ВКАЗІВКИ До виконання лабораторних та контрольних робіт для студентів спеціальності 6.090200 “Обладнання переробних і харчових виробництв» і «Обладнання фармацевтичної та мікробіологічної промисловості” напряму 0902 «Інженерна механіка» денної та заочної форм навчання
СХВАЛЕНО на засіданні кафедри МАХВ Протокол № 13 від 02.062009р.
Київ НУХТ 2009 Машини – автомати, потокові лінії та робототехнічні комплекси (МАЛ та РТК): Методичні вказівки до викон. лаборат. та контрольних робіт для студентів спеціальності 6.090200 “Обладнання переробних і харчових виробництв» і «Обладнання фармацевтичної та мікробіологічної промисловості” денної та заочної форм навчання. / Укладачі О.І.Петрікей, Ю.С.Теличкун, Ю.Ю. Доломакін. – К.: НУХТ, 2009 – 47 с.
Рецензент О.В.Ковальовдоц., к. т. н.
Укладачі: О.І. Петрікей, асистент Ю.С.Теличкун, асистент Ю.Ю.Доломакін, асистент
Відповідальний за випуск В.М. Таран проф., д. т. н.
ЗМІСТ
Лабораторна робота №1. Структурний аналіз автомату дозування негазованих рідин Д9 – ВРМ6, розроблення технологічної схеми Автомату 4 Лабораторна робота №2. Структурний аналіз автомату М6–АР 2С для пакування сиркової маси, розроблення структурної схеми автомату 14 3. Лабораторна робота №3. Структурний аналіз автомату длядозування і формуванняпластичних мас, побудова кінематичної схеми котлетоформувального автомату 23 Лабораторна робота №4. Структурний аналізетикетувального автомату “ВЭМ”, побудова циклограми 27 5. Методичні вказівки до виконання контрольних робіт 37 Додаток 1 42 Додаток 2 47
ЛАБОРАТОРНА РОБОТА № 1 СТРУКТУРНИЙ АНАЛІЗ АВТОМАТУ ДОЗУВАННЯ НЕГАЗОВАНИХ РІДИН Д9 – ВРМ6, РОЗРОБКА ТЕХНОЛОГІЧНОЇ СХЕМИ АВТОМАТУ МЕТА РОБОТИ Вивчити призначення, технічні дані, принцип роботи автомату для розливу горілчаних напоїв, правила експлуатації та технічного обслуговування, навчитись складати технологічну схему автомату. Технологічна карта машини для фасування вершкового масла Табл. 1.1.
На рис.1.2. як приклад представленатехнологічна схема автомату для фасування сипких продуктів в поліетиленову упаковку ФАС-1. Стрічка 1, яка змотується з рулону, розрізається вздовж дисковим ножем 2. Отримані полоски розвертаються навкруги двох пар направляючих роликів 5 і далі рухаються разом, повздовжні шви зварюються нагрівачами 6. У середину рукава, який утворився, засипається через трубку 3 сипкий продукт. Поперечні шви утворюються прасками 7.Протягання рукава, а відповідно і змотування стрічки з рулону здійснюють ролики 8. Заварені із чотирьох сторін пакетики з продуктом розрізаються ножовим пристроєм 9, і потрапляють в жолоб 10.
Рис. 2. Технологічна схема фасувального автомату ФАС – 1 Регулювання руху стрічки з попередньо нанесеним на неї малюнком здійснюється за допомогою фотоелектричного пристрою 4, що забезпечує центральне розміщення малюнка на пакеті. Приклад технологічної схеми напівавтомату для перев’язування сосисок і сардельок ППС-7 представлено на рис.1. 3. Напівавтоматмає 3 робочих органи: затискач двохсторонній; котушка зі шпагатом; поводок.
Рис.1.3. Технологічна схема напівавтомата ППС – 7: 1 – затискач двухсторонній; 2 – кjтушка з шпагатом; 3. – поводок; 4 – обід;5 – оболонка з фаршем.
АВТОМАТ Д9 – ВРМ6 Автомат Д9-ВРМ6 призначений для розливу горілчаних напоїв по об’єму місткістю 0,5 л.Автомат застосовується в лініях розливу горілчаних виробів на підприємствах харчової промисловості. На станині автомату розташовані стійки з валами. Привід складається з електродвигуна з дисковим варіатором, клинопасової передачі, редуктора й зубчатих передач. На центральному валу закріплена карусель зі стійкою, до верхньої частини якої прикріплений резервуар із дозатором і поплавком. На бічних стійках розташовані стіл і зірочки. Стакани закріплені на на каруселі. Резервуар можна піднімати, або опускати в залежності від висоти пляшок за рахунок гвинтової пари, яка розташована в стійках каруселі й резервуара. В основі станини є ніжки з віджимними пристроями. На автоматі встановлені олійниці для періодичного змащення. В резервуар 1 через вхідну трубу (рис.1. 4) надходить рідина, заданий рівень якої підтримується поплавком 2. Стрічка транспортера, що проходить через стіл автомата, подає пляшки до «зірочки—крокоміра» 3, встановленої на столі 4. Зірочка крокоміра пропускає пляшки по одній до подаючої зірочки 5, яка направляє пляшки на піддон стакану піднімального столика 6, що закріплений на каруселі 7. При обертанні каруселі піднімальний столик разом із пляшкою, виходячи з під копіра 8 під дією пружини, піднімається вгору й притискає горловину пляшки до вставки дозатора 9 і, продовжує підніматисьі приводить в дію клапанну систему дозатора. Рідина з мірного стакана переливається в пляшку. По закінченню одного оберту каруселі піднімальний столик разом із наповненою пляшкою по копіру опускається вниз (у вихідне положення). У цей час спрацьовуєклапанна система, яка відсікає переливання рідини в пляшку, і відкриває клапан для наповнення мірника дозатора продуктом із резервуара. Вихідна зірочка 10 знімає з підйомного столика пляшку й по напрямній 11 направляє її на стрічку транспортера
Рис. 4. Загальний вигляд автомату Д9 – ВРМ6
Ємність для вмісту видаткової рідини в автоматі Д9-ВРМ6 – циліндричний резервуар (рис.1. 5.), який складається з дна 8, корпусу 11 і фланця 12. Всередині резервуара, по колу, рівномірно розміщені вісімнадцять дозаторів 10. Корпус 9 дозатора закріплений у дні 8. Для створення герметичності під бурт корпуса покладена прокладка 13. Для підтримки заданого рівня рідини в резервуарі у верхній його частині є поплавковий пристрій 4, що закріплений болтами до фланця 12. На фланці розташовані та закріплені гвинтами гайки 3 для витискувачів, які відцентровані з дозаторами. Знизу до дна резервуара болтами прикріплена стійка 7, що входить у з’єднання зі стійкою каруселі; у такий спосіб створюється телескопічна пара. Для регулювання рівня рідини в резервуарі необхідно послабити за допомогою гвинта 15 гайку 16. При обертанні гайки 16 по годинниковій стрілці поплавковий пристрій 4 буде підніматися вгору, а при обертанні гайки проти годинникової стрілки – донизу. По встановленні необхідного рівня рідини в резервуарі гвинт 15 варто затягнути. Якщо в резервуарі бракує рідини для нормальної роботи, регулюють хід поплавка 14. Для цього необхідно зняти кришку 5, відкрутити гайку 2 і, обертаючи стрижень 1 у ту або іншу сторону, забезпечити збільшення, або зменшення ходу поплавка. Після встановлення необхідного ходу поплавка гайку 2 варто закрутити, поставити на місце кришку 5, закріпивши її болтами. Хід поплавка повинен бути 12....13 мм.При вимушеній зупинці автомата клапан 6 під впливом поплавка 8 повністю
закриває надходження рідини в резервуар.
Рис1.5. Резервуар витрати рідини Безпосередньо операції дозування по об’єму й зливу рідини в тару виконують дозаторами. Дозатор складається з мірного стакана 14, закріпленого в корпусі 13, і рухомої клапанної системи, розташованої в стакані 10. Дзвіночок 8 охороняє клапанну систему від випадання. На рис. 16. представлена структурна схема автомату.
Рис.1.6. Структурна схема автомата На рис.1. 7 представлена кінематична схема автомата для дозування рідини
Рис.1.7. Кінематична схема автомату Теоретичну продуктивність автомата Пт (в пляшках за годину)можемо визначити за наступною формулою:
, Пт= 3600 un, шт/год де: u – кількість наповнювачів, шт; n - частота обертання ротора, с-1(визначаємо із кінематичної схеми). ЗАПИТАННЯ ДЛЯ САМОПЕРЕВІРКИ 1. Поясніть будову та роботу автомата Д9-ВРМ6. 2. Зазначте переваги й недоліки наведеної конструкції автомата. 3. Технічна характеристика автомата. 4. Призначення автомата Д9-ВРМ6. 5. Зобразіть принципову технологічну схему автомата Д9-ВРМ6. 6. Зобразіть кінематичну схему автомата. 7. Зобразіть структурну схему автомата. 8. Зобразіть циклограму автомата. 9. Правила експлуатації та технічного обслуговування автомату Д9-ВРМ6. 10. Будова й робота резервуару витрати рідини в автоматі Д9-ВРМ6. 11. Будова й робота дозатора.. 12. Основні складові частини автомата. 13. Дайте визначення: технологічної схеми, технологічної карти машини.
РЕКОМЕНДОВАНА ЛІТЕРАТУРА 1. Техническое описание и инструкция по эксплуатации автомата Д9-ВРМ-6. –М.: Минлегпищемаш, 1973. 2. Степанов И.А., Галасов П.Н. Автоматические линии розлива пищевых жидкостей. – М.:Пищевая промышленность, 1971. – 360 с. 3. Халаим А.Ф., Панченко И.Н. Оборудование предприятий спиртовой и ликероводочной промышленности. М.: Пищевая промышленность, 1976. – 294 с. 4. Попов В.И., Кретов И.Т., Стабников В.Н. и др. Технологическое оборудование предприятий бродильной промышленности. – М.: Пищ. пром-сть, 1972. 5. Машины-автоматы для упаковки пищевых продуктов: Справочник/ В.А. Благодарский, Н.С. Колесник, М.С. Зиновьева. – К.: Техніка, 1985. – 229 с., ил.
ЛАБОРАТОРНА РОБОТА № 2 МЕТА РОБОТИ Вивчити призначення, технічні данні, принцип роботи автомату для пакування сиркової маси., правила експлуатації та технічного обслуговування, навчитись складати технологічну схему автомату.
Умовні позначення елементів Структурної схеми Табл. 1.
Рис.2.1. Загальний вигляд автомату для пакування сиркової маси М6-АР2С. представлена на рис.2.2.
Рис. 2.2. Технологічна схема автомата. Технологічний цикл роботи машини Конструкція автомата виконана так, що всі операції фасування й пакування продукту проходять послідовно по колу. Головною сполучною ланкою між основними вузлами є стіл, на якому знаходяться вісім гнізд, розміщених рівномірно по колу під кутом 45°. Технологічний цикл роботи автомата складається з таких операцій: завантаження бункера продуктом; подача пакувального матеріалу й нанесення дати датувачем; відрізання розгортки для коробки зі стрічки пакувального матеріалу; перенесення розгортки на формувальну матрицю; перевірка наявності розгортки на формувальній матриці; утворення коробки й укладання її у гніздо формувального столу; дозування визначеної порції продукту в коробку; загинання країв брикету; підпресовування, яке забезпечує густину і кінцеве пакування брикету; знімання готових брикетів з формувального столу з їх переворотом на 180°. Перед початком роботи механізм утворення коробки заправляється пакувальним матеріалом. Стрічка пакувального матеріалу з рулону надітого на вал рулонотримача 1, розмотується барабаном механізму попереднього розмотування 2, та секторами попереднього розмотування 3 і проштовхується поміж ножами механізму відрізання 4, привід якого здійснюється пневмоциліндром 5, які відрізають розгортку для коробки. За допомогою цього пневмоциліндра приводиться в дію датувач б. Відрізана розгортка переноситься на формувальну матрицю 7 сектором 8 і валиком роликів 9 під пуансон. Пуансон 10 (привід якого здійснюється від пневмоциліндра 11), переміщуючись всередині формувальної матриці, утворює коробку і подає її у гніздо формувального столу 12. Стіл, повертаючись на кут 45°, переносить коробку до механізму дозування, привід якого складається з електродвигуна, та двох пневмоциліндрів двосторонньої дії 13 – поршня дозатора та 14 – крана дозатора. Пневмоциліндр 13 (поршня дозатора) слугує для наповнення та випорожнення мірної ємності, а пневмоциліндр 14 – для введення та виведення крана дозатора в готову коробку для наповнення продуктом. Пневмоциліндр 15 механізму повороту дозатора 16, який приводиться в рух коли необхідне очищення бункера і самого дозатора при зміні продукту. Дозатор наповнює коробку визначеною порцією продукту. При подальшому повороті стола брикет із продуктом переміщується до вузла пакування 17, в складі якого є два пневмоциліндри 18 та 19, відповідно для приводу лапок загортання двох кінцевих та однієї бічної стінки наповненого брикету. Після загинання країв гніздо з брикетом переміщується до механізму підпресовування 20, який остаточно ущільнює брикет. Потім брикет переміщується до механізму знімання та перевертання 21, привід якого здійснюється пневмоциліндром 22, за допомогою якого відбувається знімання готового брикету з формувального столу та його перевертання (для попередження відкривання країв брикету під час транспортування) з надходженням на підвідний конвеєр 23. На рис. 2.3, 2.4, 2.5 представлені окремі механізми автомату: механізм утворення коробки, механізм подачі розгортки, формувальний стіл.
Рис. 2.3. Механізм подачі розгортки: 1,3 – важелі; 2 – палець; 4 – тяга; 5 – підгинач розгортки
Рис.2.4. Виконавчий механізм завантажувального патрубка дозатора
ТЕХНІЧНА ХАРАКТЕРИСТИКА АВТОМАТУ М6 – АР2С Табл.1.
Рис. 2.5. Механізм утворення коробки: 1 – пуансон; 2 – повзун; 3 – корпус;4 – привод відсікача
Рис. 2.6. Формувальний стіл: 1 – виштовшувач; 2 – підйомник;3,4 – кулачки; 5 – диск; 6 – ролик; 7 – пластинка; 8 – установлюваний гвинт; 9 – прес; 10 – регулювальний гвинт; 11 – формувальний стіл; 12 – вкладиш
ПОРЯДО К ВИКОНАННЯ ЛАБОРАТОРНОЇ РОБОТИ Під час виконання лабораторної роботи студенти: - вивчають призначення, будову та роботу машини, технологічним процесом, що виконує машина; - ознайомлюються з призначенням та дією робочих органів; - вивчають кінематичну схему та циклограму автомату; - розробляють технологічну схему.
Результати роботи оформлюються протоколом, у якому треба подати такі відомості: мета роботи; призначення та технічна характеристика автомату; будова та принцип дії установки; зобразити технологічну, кінематичну, схеми автомату; розробити структурну схему механізму завантажувального патрубку дозатора.
ЗАПИТАННЯ ДЛЯ САМОПЕРЕВІРКИ
1. Будова та робота автоматів карусельного типу для фасування й пакування в’язких молочних продуктів. 2. Поясніть будову та роботу автомата М6-АР2С. 3. Зазначте переваги й недоліки наведеної конструкції автомату. 4. Технічна характеристика автомата. 5. Призначення автомата М6-АР2С. 6. Зобразіть принципову технологічну схему автомата М6-АР2С. 7. Зобразіть структурну схему автомата. 9. Правила експлуатації та технічного обслуговування автомату М6-АР2С. 9. Будова й робота завантажувального патрубка дозатора. 10. Зобразіть геометричну схему виконавчого механізму завантажувального патрубка дозатора. 11. Зобразіть кінематичну схему патрубка дозатора. 12. Зобразіть структурну схему патрубка дозатора. 13. Зобразіть циклограму завантажувального патрубка дозатора. 14. Технологічний цикл роботи автомату.
РЕКОМЕНДОВАНА ЛІТЕРАТУРА 1. Техническое описание и инструкция по эксплуатации автомата М6-Р2С –В.: Экспериментальное конструкторское бюро, 1978. 2. Харламов С.В. Практикум по расчету и конструированию машин и аппаратов пищевых производств. – Л.: Агропромиздат. Ленинградское отд- деление, 1991. – 226 с., ил. 3. Артоболевский С.И. Технологические машины – автоматы. М., «Машиностроение», 1964 4. Машины-автоматы для упаковки пищевых продуктов: Справочник/ В.А. Благодарский, Н.С. Колесник, М.С. Зиновьева. – К.: Техніка, 1985. – 229 с., ил. 5. Притыко В.П. Машины и аппараты молочной промышленности. – М.: Пищ. пром-сть, 1979. – 319 с. 6. Волчков И.И. Автоматы для фасовки и упаковки молока и молочных продуктов. – М.: Пищ. пром-сть, 1977. - 125 с.
ЛАБОРАТОРНА РОБОТА № 3
АК2М-40
МЕТА РОБОТИ Вивчити призначення, технічні данні, принцип роботи автомату для формування та дозування котлет, правила експлуатації та технічного обслуговування.
ЗАВДАННЯ Студенти повинні: - ознайомитися з будовою та роботою автомату АК2М-40; - вивчити правила експлуатації та технічного обслуговування; - на основі здобутих знань зобразити кінематичну схему автомата АК2М-40.
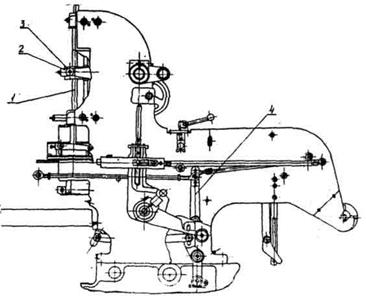
Теоретичні відомості Кінематична схема - це умовне зображення всіх ланцюгів і механізмів машини, призначених для регулювання, керування, і контролю заданих рухів робочих органів. На схемі повинен бути відображений кінематичний зв’язок (механічний і немеханічний), передбачені всередині виконавчих механізмів машини, а також зв’язки із джерелом енергії. Рис. 3.1. Кінематична схема напівавтоматудля перев'язування сосисок і сердельок іППС – 14
Кінематична схема дозволяє швидко розібратися в принципі дії машини, представити її структуру й склад. На кінематичній схемі необхідно вказати: потужність двигуна; частоту обертання валів машини; модулі зубчатих коліс. Кожному елементу, зображеному на кінематичній схемі, присвоюється порядковий номер, починаючи із джерела руху. Вали нумерують римськими цифрами, інші елементи – арабськими.
Технічна характеристика Продуктивність – 4000 шт./год. Місткість бункера для фаршу – 10 кг
Маса відформованих виробів – 45,0...95,0 г Частота обертання формуючого стола – 12,45 об/хв. Частота обертання шнека – живильника – 37 об/хв. Потужність електродвигуна – 0,4 кВт Частота обертання – 1416 об/хв. Габаритні розміри – 610´390´630 мм Маса – 75 кг
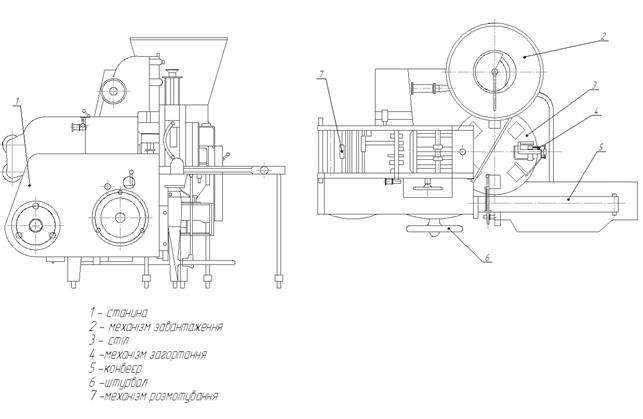
Рис.3. 3. Технологічна схема автомату
Рис.3. 4. Структурна схема котлетоформувальної машини
Схема включає в себе електродвигун, систему механічних передач від двигуна до розподільчо-управлінського валу машини, виконавчий механізм підйому й опускання поршнів формувальника, виконавчий механізм регулювання маси котлет за рахунок нижнього обмеження переміщення поршнів формувальника. ЗАПИТАННЯ ДЛЯ САМОПЕРЕВІРКИ
1. Поясніть будову та роботу автомата АК2М-40. 2. Зазначте переваги й недоліки наведеної конструкції автомата. 3. Технічна характеристика автомата. 4. Призначення автомата АК2М-40. 5. Зобразіть принципову технологічну схему автомата АК2М-40. 6. Зобразіть кінематичну схему котлетоформуючого автомата. 7. Зобразіть структурну схему котлетоформуючого автомата. 8. Зобразіть циклограму котлетоформуючого автомата. 9. Види циклограм. 10. Автоматична лінія.
РЕКОМЕНДОВАНА ЛІТЕРАТУРА
1. Харламов С.В. Практикум по расчету и конструированию машин и аппаратов пищевых производств. – Л.: Агропромиздат. Ленинградское отд- деление, 1991. – 226 с., ил. 2. Артоболевский С.И. Технологические машины-автоматы. М., «Машиностроение», 1964 3. Пелеев А.И. Технологическое оборудование предприятий мясной промышленности. – М.: Пищевая промышленность, 1971. – 519 4. Машины-автоматы для упаковки пищевых продуктов: Справочник/ В.А. Благодарский, Н.С. Колесник, М.С. Зиновьева. – К.: Техніка, 1985. – 229 с., ил. 5. Фалеев Г.А. Оборудование предприятий мясной промышленности. – М.: Пищевая промышленность, 1966. – 484 с.
ЛАБОРАТОРНА РОБОТА №4 «СТРУКТУРНИЙ АНАЛІЗ ЕТИКЕТУВАЛЬНОГО АВТОМАТА “ВЭМ”, ПОБУДОВА ЦИКЛОГРАМИ»
МЕТА РОБОТИ
Вивчити призначення, технічні данні, принцип роботи етикетувального автомата, правила експлуатації та технічного обслуговування, побудувати циклограму
ЗАВДАННЯ
Студенти повинні: - ознайомитися з будовою та роботою автомата “ВЭМ”; - розібратися в кінематичній схемі автомата; - вивчити конструкцію й принцип роботи етикетувального автомата; - на основі здобутих знань зобразити технологічну, структурну, кінематичну схеми етикетувального автомата, побудувати циклограму - Теоретичні відомості Циклограма автомату або окремого його вузла – це сукупність графків, які відображають послідовність і співвідношення інтервалів робочих і холостих ходів і зупинок робочих органів машини в межах кінематичного циклу. Така циклограмам є циклограмою інтервалів і вказує коли робочі органи починають і закінчують свій рух. Відлік часу ведеться від початкуробочогоробочого ходу ведучої ланки будь-якого виконавчого механізмк, який приймається за основний. Як правило, але не обов'язково, це механізм – першої за технологічним процесом операції. Циклограми інтервалів виконують в визначеному масштабі часу або кута повороту основного розподільчо-управлінського валу
Робочий хід (Р.Х.) зображується прямою, нахиленою під кутом до позитивного напрямку осі часу t. Холостий хід (Х.Х.) зображений прямою, нахиленою під тупим кутом до позитивного напрямкуосі часу t. Вистій зображається прямою, паралельною осі часу. При побудуові циклограми графіки слід розташовувати в напрямку початку робочих ходів робочих органів. За формою графічного зображення циклограми можуть бути: прямокутними, лінійними та круговими рис. 4.1.
Рис. 4.1. Приклади побудови циклограм ЗАПИТАННЯ ДЛЯ САМОПЕРЕВІРКИ
1. Поясніть будову та принцип роботи етикетувального автомата. 2. Зазначте переваги й недоліки наведеної конструкції автомата. 3. Технічна характеристика автомата. 4. Призначення автомата ВЭМ. 5. Зобразіть технологічну схему етикетувального автомата. 6. Зобразіть кінематичну схему. 7. Зобразіть структурну схему. 8. Зобразіть циклограму. 9. Основні вузли автормата.
РЕКОМЕНДОВАНА ЛІТЕРАТУРА
1. Харламов С.В. Практикум по расчету и конструированию машин и аппаратов пищевых производств. – Л.: Агропромиздат. Ленинградское отд- деление, 1991. – 226 с., ил. 2. Артоболевский С.И. Технологические машины-автоматы. М., «Машиностроение», 1964. 3. Степанов И.А., Галасов П.Н. Автоматические линии розлива пищевых жидкостей. – М.: Пищевая промышленность, 1971. – 360 с. 4. Машины для фасования пищевых жидкостей в бутылки / Ц.Р. Зайчик, В.А. Трунов, В.К. Яшин. – М.: Агропромиздат, 1989. – 239 с.: ил.
Лекційні заняття
В контрольній роботі студенти відповідають на 2 запитання і виконують індивідуальне завдання, завдання якого узгоджується із викладачем. наведені в таблиці 5.1. Варіант питань вибирають відповідно до номера в списку групи. В індивідуальному завданні висвітлюється характеристикамашини-автомату, її будова, робота, визначається клас машини, виконується розрахунок продуктивності, структурний аналіз, наводиться технологічна, структурна, кінематична схеми, циклограма машини-автомату. Контрольна робота виконується державною мовою на листках формату А4 чорними чорнилами з титульною сторінкою в рукописному варіанті. Зразок оформлення титульної сторінки наведено в Додатку 1.Після титульної сторінки наводиться зміст роботи. Зміст контрольної роботи має влючати такі розділи: вступ, теми питань контрольної роботи (два теоретичних питання та індивідуальне завдання) висновки, список використаної літератури.Розділи нумеруються малими арабськими цифрами крім вступу, висновків в списку літератури. Нумерація починається з титульної сторінки, але на ній номер не проставляється. Всі наведені в контрольній роботі рисунки нумеруються і підписуються. Нумерація рисунків суцільна по всій записці або по розділах. Наприклад: Рис.2.1. Технологічна схема автомату. В тексті наводиться посилання на літературні джерела в квадратних дужках, наприклад: [5.с.32 ]. Робота має бути прошита.Орієнтовно обсяг роботи складає 20-25 сторінок. Література 1. Кольман–Иванов Э.Э.. Машины-автоматы химических производств. Теория и расчет. М., “Машиностроение”, 1972. – 296 с.
2. Шувалов В.Н. Машины-автоматы и поточные линии. Л. “Машино-строение”, 1973. – 544 с. 3. Харламов С.В. Практикум по рассчету и конструированию машин и аппаратов пищевых производств. – Л.: Агропромиздат. Ленинградское отделение, 1991. – 226 с., ил. 4. Артоболевский С.И. Технологические машины-автоматы. М., «Машиностроение», 1964. 5. Машины-автоматы для упаковки пищевых продуктов: Справочник/ В.А. Благодарский, Н.С. Колесник, М.С. Зиновьева. – К.: Техніка, 1985. – 229 с., ил. 6. Соколов А.Я. Основы расчета и конструирования машин и аппаратов пищевых производств. М., “Пищепромиздат”, 1960. 7. Устройство и эксплуатация оборудования предприятий пищевой промышленности / под. ред. А.И. Драгилева: 2 – е изд., перераб. и доп.: М.: Агропромиздат, 1988. – 399 с.: ил. 8. Епифанов А.Д. Надежность автоматических систем. – М.: Машиностроение, 1964. 9. Бежанов Б.Н., Бушунов В.Т. Производственные машины – автоматы. – Л., 1973. – 360 с. 10. Расчет и конструирование машин и аппаратов пищевых производств. Методические указания к лабораторным работам. Кобылкин А.В., Цыдендоржиева Г.Р. – Улан–Удэ.: ВСГТУ, 2004. 11. Шаумян Г.А. Автоматы и автоматические линии. – М. Машгиз, 1961. 12. Проников А.С. Основы надежности и долговечности машин. – М.: «Комитет стандартов», 1969. – 160 с. 13. Робототехника и гибкие автоматизированные производства. В 9 – ти кн. Кн 8. Основы систем автоматизированного проектирования гибких производств: Учеб. Пособие для вузов / Под ред. И.М. Макарова. – М.: Высш. Шк., 1986. – 175 с.: ил. 14. Попов Е.П. Робототехника и гибкие производственные системы. – М.: Наука. Гл. ред. физ. – мат. лит., 1987. – 192 с. 15. Цейтлин Г.Е., Хархота А.Г. Применение роботов в пищевой промышленности. – К.: Урожай, 1988. – 184 с. 16. Попов Е.П., Письменный Г.В. Основы робототехники: Введение в специальность: Учеб. для вузов по спец. “Р обототехн. системы и комплексы” – М.: Высш. шк., 1990. – 224 с.: ил. Додаток 1. Кафедра:Машини і автомати Харчових виробництв
Дисципліна: Контрольна робота Варіант № Тема: (вказуються питання контрольної роботи)
Виконав: студент групи_______ ( Прізвище, ім’я, по-батькові) Прийняв: ( Прізвище, ім’я, по- батькові ви
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 770; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.19.251 (0.011 с.) |