Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основы теории машин и механизмов
Теория машин и механизмов (ТММ) – это научная дисциплина об общих методах исследования, построения, кинематики и динамики механизмов и машин и о научных основах их проектирования. Механизм – это устройство, предназначенное для преобразования движения одних тел (деталей, звеньев) в требуемые движения других тел (деталей, звеньев). Машина– это техническое устройство, выполняющее преобразова-ние энергии, материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производитель-ности. Кинематический анализ механизма Синтез механизма – проектирование – имеет значительные трудности теоретического характера, поэтому при выполнении прикладных инженерных задач менее распространен, чем анализ. Анализ механизма – исследование из ряда типовых, наиболее подходящих механизмов с целью изучения законов изменения их основных параметров и на основе этого выбор из этого ряда известных наилучшего механизма. Как правило, при этом исследуются не сами механизмы, а их схемы. По сравнению с синтезом, анализ механизма более широко используется в практике, поэтому на нём остановимся более подробно. Цели кинематического анализа: 1.Определение кинематических характеристик звеньев: -перемещений; -скоростей; -ускорений; -траекторий движения; -функций положения при известных законах движения входных (ведущих) звеньев. 2.Оценка кинематических условий работы рабочего (выходного) звена. 3.Определение необходимых численных данных для проведения силового, динамического, энергетического и других расчётов механизма. Задачи кинематического анализа: 1.Задача о положениях звеньев механизма. Определение траекторий движения звеньев или их отдельных точек. 2.Задача о скоростях звеньев или отдельных точек механизма. 3.Задача об ускорениях звеньев или отдельных точек механизма. Методы кинематического анализа: 1.Графический (или метод графиков и диаграмм). 2.Графоаналитический (или метод планов скоростей и ускорений). 3.Аналитический. 4.Экспериментальный. 2.1.1.Графоаналитический метод кинематического анализа – метод планов скоростей и ускорений. Задача о положениях решается графическим методом, то есть
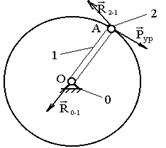
построением нескольких совмещённых планов механизма в выбранном масштабе длин. Задачи о скоростях и ускорениях решаются построением планов скоростей и ускорений звеньев механизма при определённых (заданных) положениях ведущего звена на основе заранее составленных векторных уравнений скоростей и ускорений звеньев механизма. Преимущества этого метода по сравнению с графическим методом следующие: он менее трудоёмок, так как позволяет определять скорости и ускорения (их величину и направление) на одном плане скоростей или плане ускорений для множества точек механизма. Недостатком этого метода является то, что требуется построить планы скоростей и ускорений для нескольких положений механизма (если необходимо определять скорость и ускорение при различных положениях механизма и, соответственно, его звеньев). Планы скоростей и ускорений механизма шарнирного четырёхзвенника Как правило, при решении задач такого типа известны угловая скорость Последовательность решения задачи следующая (рис.2.1): 1). Строится план механизма в выбранном масштабе длин где lOA – длина кривошипа, м; AO – длина отрезка, изображающего кривошип на плане механизма, мм. Для построения плана механизма остальные длины звеньев и координаты неподвижных точек шарнирного четырехзвенника (рис. 2.1) переводятся масштабом длин m l в отрезки AB = l AB / m l, мм, BC = lBC / m l, мм, OC = lOC / m l, мм. 2). Составляются векторные уравнения линейных скоростей отдельных точек, принадлежащим звеньям механизма. Векторное уравнение скоростей для звена 2 (шатуна):
где Векторное уравнение для звена 3 (коромысла):
Так как точка С (центр вращения коромысла 3) неподвижна, то её скорость равна нулю (
3). Строится план скоростей механизма. План скоростей – это не что иное, как графическое изображение на чертеже векторных уравнений (2.1) и (2.2) в каком-либо масштабе.
Рис. 2.1. Пример плана механизма шарнирного четырехзвенника, планов скоростей и ускорений План скоростей механизма и его свойства План скоростей желательно строить рядом с планом механизма (рис. 2.1.). Предварительно рассчитывается скорость точки А кривошипа 1:
Затем выбирается масштаб плана скоростей m u по соотношению
где При выборе желательно придерживаться следующих условий: во-первых, чтобы план скоростей разместился на отведённом месте чертежа и, во-вторых, чтобы численное значение масштаба После этого можно приступать к построению плана скоростей механизма. Его желательно проводить в последовательности, соответствующей написанию векторных уравнений (2.1) и (2.2). Сначала проводится из произвольно выбранной рядом с планом механизма точки Определим скорость точки К, принадлежащей шатуну 2. Для неё можно записать следующие векторные уравнения скоростей:
Здесь вектор скорости
где Можно заметить, что треугольники на плане скоростей и плане механизма подобны
так как стороны их взаимно перпендикулярны. Это свойство можно использовать для определения скорости любой другой точки, принадлежащей какому либо звену механизма. Отсюда следует теорема подобия: отрезки относительных скоростей на плане скоростей образуют фигуру, подобную фигуре соответствующего звена на плане механизма. Стороны фигур взаимно перпендикулярны. Значения угловых скоростей шатуна 2
Направления угловых скоростей
Аналогично поступают со скоростью План ускорений механизма и его свойства План ускорений желательно строить рядом с планом механизма. Последовательность построения плана ускорений рычажного механизма аналогична построению плана скоростей. Рассмотрим её на примере механизма шарнирного четырехзвенника (рис.2.1). Примем угловую скорость кривошипа 1 постоянной (w 1 = const, что является наиболее распространённым и рациональным видом движения в реальных механизмах). Векторное уравнение ускорений для звена 1 (кривошипа ОА):
где рассчитывается по формуле
Вектор
В нашем случае угловое ускорение кривошипа Векторное уравнение ускорений для звена 2 (шатуна AB):
где нормальная составляющая ускорения точки В относительно точки А рассчитывается по формуле
Вектор нормальной составляющей ускорения Векторное уравнение ускорений для звена 3 (коромысла ВС):
где
Вектор нормальной составляющей ускорения Выбираем масштаб плана ускорений: Из произвольно выбранного полюса плана ускорений Ра параллельно отрезку ОА плана механизма проводится вектор ускорения
Используя план ускорений, можно вычислить значения ускорений:
Можно записать так: где w 2 и e 2 – значения угловой скорости и углового ускорения шатуна 2 соответственно. Из этого уравнения следует
В этом уравнении w 2 и e 2 не зависят от выбора (расположения) полюса Ра плана ускорений, а отношение масштабов постоянно m l / m a = const для данного плана ускорений. Поэтому для любой точки (например К, принадлежащей шатуну) можно записать пропорции
Отсюда формулируется теорема подобия: отрезки полных относительных ускорений на плане ускорений образуют фигуру, подобную соответствующей фигуре звена на плане механизма. Величину ускорения точки К можно вычислить по формуле
Угловые ускорения звеньев: шатуна: коромысла: Так как угловая скорость Силовой анализ механизмов При проведении силового анализа решаются две основные задачи: 1. Определение сил реакций в кинематических парах механизмов, находящихся под действием заданных внешних сил. Эти реакции затем используются для расчета звеньев и элементов кинематических пар (подшипников, например) на прочность, жесткость, долговечность и т. д. 2. Определение уравновешивающей силы Силы, действующие в механизмах Различают две большие группы сил: 1. Движущие силы совершают положительную работу; направлены в сторону скорости точки приложения силы или под острым углом к ней; задаются посредством механической характеристики двигателя. 2. Силы сопротивления совершают отрицательную работу; направлены противоположно скорости. Они подразделяются на силы:
полезного сопротивления вредного сопротивления: а) трения в кинематических парах; б) сопротивления среды (жидкости, воздуха); в) внутреннего сопротивления (например, силы упругости звеньев). Кроме того, существуют силы веса Силы инерции звеньев и моменты от сил инерции Из теоретической механики известно, что все силы инерции звена, совершающего плоскопараллельное движение и имеющего плоскость симметрии, параллельную плоскости движения, могут быть сведены: к силе инерции
Знаки «минус» показывают, главный вектор сил инерции Удобно для дальнейших расчетов заменить
Рис. 2.2. Перенос силы на плечо при замене силы и момента силы одной силой Статическая определимость кинематической цепи При силовом анализе механизмов (определении неизвестных сил, действующих на движущиеся звенья) можно использовать уравнения (законы) статики. Это положение докажем ниже. Проанализируем реакции в кинематических парах (табл. 2.1). Таблица 2.1.Виды кинематических пар 5-го и 4-го классов
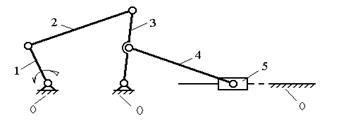
Из приведенной таблицы следует, что в кинематических парах 5-го класса известен лишь один параметр сил реакций, неизвестны два. В кинематических же парах 4-го класса известны два параметра, а неизвестен один. Таким образом, плоская кинематическая цепь, состоящая из кинематических пар 5-го и 4-го классов, имеет 2 Р 5 + Р 4 неизвестных величин сил реакций. Здесь Р5 и Р4 - численность кинематических пар 5-го и 4-го классов. Как известно из статики, для одного звена в плоскости можно составить 3 уравнения равновесия, а для n звеньев – 3 n уравнений статики. Кинематическая цепь будет статически определима, если число неизвестных величин сил реакций не превышает числа возможных уравнений статики, то есть 3 n = 2 P 5 + Р 4. Это есть условие статической определимости кинематической цепи. Полученное равенство можно записать в следующем виде: 3 n – 2 Р 5 – Р 4 = 0. Но запись слева от знака равенства является числом степеней свободы кинематической цепи W, то есть W = 3 n – 2 Р 5 – P 4 = 0. Как известно из разделов о структуре механизмов (см. п. 2.1 и п. 2.2), таким свойством (W = 0) обладают структурные группы (или группы Ассура). То есть группы Ассура являются статически определимыми кинематическими цепями. Поэтому метод силового анализа, приведенный ниже, называется кинетостатическим, так как для определения сил реакций в кинематических парах, возникающих при движении звеньев, используются уравнения статики. Порядок (последовательность) силового анализа рычажного механизма: 1).Выделяем из механизма последнюю (крайнюю, наиболее удаленную от ведущего звена) структурную группу и проводим ее силовой расчет, используя уравнения статики. 2). Выделяем из механизма следующую структурную группу и проводим ее силовой расчет. 3). Силовой расчет заканчиваем силовым расчетом ведущего звена. Например, пусть задан шестизвенный рычажный механизм (рис. 2.3). Механизм состоит из начального механизма (звенья 0 и 1) и структурных групп, образованных звеньями 2 и 3 (двухповодковая структурная группа 2-го класса 1-го вида) и звеньями 4, 5 (структурная группа 2-го класса 2-го вида).
Рис. 2.3. Шестизвенный рычажный механизм Последовательность силового анализа механизма 1).Проводим силовой расчет структурной группы 4–5 (то есть определяем неизвестные реакции, если известны внешние силы, действующие на звенья 4 и 5):
2).Проводим силовой расчет структурной группы 2–3:
3).Проводим силовой расчет ведущего звена 1:
2.2.1. Силовой анализ характерной структурной группы 2-го класса 1-го вида Дано: Внешние силы инерции Найти: Реакции в кинематических парах А, В и С (рис. 2.4).
Рис. 2.4. План структурной группы 2-го класса 1-го вида Решение: 1).Строим структурную группу в масштабе длин m L (см. рис. 2.4). 2).Наносим на нее все внешние силы 3).В кинематических парах А и С действие отброшенных звеньев (например, кривошипа 1 и стойки 0) заменяем силами реакций
4).Составляем уравнение равновесия структурной группы:
5).Вычисляем величины тангенциальных сил. Для этого используем условие, что моменты сил относительно точки В, приложенные к звеньям 2 и 3, равны нулю:
Следует учитывать, что если в процессе решения эти тангенциальные силы получились с отрицательным знаком, то на плане структурной группы их предварительно выбранное направление следует поменять на противоположное. 6).Неизвестные Для построения плана сил выбираем масштаб плана сил: Переводим (пересчитываем) силы уравнения (2.3) в векторные отрезки с длинами: Тогда уравнение (2.3) запишется в виде
Построение плана сил ведем в последовательности написания уравнения (2.4), рис. 2.5.
Рис. 2.5. План сил структурной группы 7).Вычисляем величины сил реакции:
где длины отрезков 8).Определяем силу реакции в кинематической паре В, для этого состав-ляем векторное уравнение равновесия шатуна 2 или коромысла 3, например, условие равновесия шатуна 2 можно записать в виде
где
Рис. 2.6. План сил шатуна 2 2.2.2. Силовой анализ ведущего звена Вариант: ведущее звено – зубчатое колесо или кривошип. На изображенном плане кривошипа 1 (рис. 2.7) сила реакции в кинематической паре А
Рис. 2.7. План кривошипа 1 с приложенными силами Силу реакции
Условие равновесия ведущего звена 1 (кривошипа):
Строим план сил кривошипа 1 в масштабе Записываем уравнение равновесия (2.6) в виде векторных отрезков:
Уравновешивающая сила вычисляется по формуле
реакция в кинематической паре О – по формуле
где величины
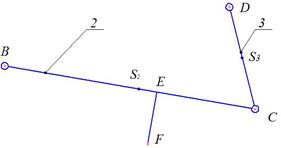
Рис. 2.8. План сил кривошипа 1 Пример 1.Кинематический и силовой анализ механизма шарнир-ного четырехзвенника Для механизма шарнирного четырёхзвенника, положение звеньев которого задано углом поворота кривошипа φ 1 = 30° (рис. 2.9), выполнить структурное, кинематическое и силовое исследование.
Рис. 2.9. Структурная схема механизма шарнирного четырёхзвенника
Дано: частота вращения кривошипа n 1 = 450 об/мин; линейные размеры звеньев механизма: lAB = 0,29 м, lB С = 1,4 м, Кинематическое исследование выполнить графоаналитическим методом. Силовой анализ начального механизма выполнить двумя способами: 1. С помощью плана сил. 2. С помощью теоремы о «жёстком» рычаге Н.Е. Жуковского. Решение: Структурный анализ механизма Заданный механизм состоит из неподвижного звена – стойки и трёх подвижных звеньев – кривошипа АВ, шатуна ВС и коромысла CD. Стойка представлена двумя шарнирно-неподвижными опорами А и D. На структурной схеме механизма (рис. 2.9) элементы стойки обозначены цифрой 0, а подвижные звенья – цифрами 1, 2, 3 соответственно. Кривошип 1 со стойкой 0 образуют вращательную кинематическую пару (т.е. подвижное соединение двух звеньев) А. Шатун 2 образует вращательную кинематическую пару В с кривошипом 1. Коромысло 3 образует вращательную кинематическую пару С с шатуном 2 и вращательную кинематическую пару D со стойкой 0. Результаты структурного анализа механизма шарнирного четырехзвенника оформим в виде схемы (рис.2.10) и таблицы кинемати-ческих пар (табл.2.2):
а б Рис. 2.10. Структурные группы механизма: а – двухповодковая; б – начальный механизм
Таблица 2.2. Кинематические пары механизма
Число степеней свободы механизма определим с помощью формулы Чебышева: W = 3· n – 2· Р5 – Р4. Согласно структурной схеме число подвижных звеньев n = 3. Согласно таблице структурного анализа число кинематических пар 5-го класса Р5 = 4, кинематические пары 4-го класса отсутствуют. Тогда число степеней свободы механизма: W = 3·3 – 2·4 – 0 = 1. Число 1 указывает, что данный механизм имеет одно ведущее звено, входящее в начальный механизм. Начальный механизм образован кривошипом 1 и стойкой 0 (см. рис. 2.10 б). В структуру заданного механизма также входит двухповодковая структурная группа, состоящая из шатуна 2 и коромысла 3 (см. рис. 2.10 а). Кинематический анализ механизма 1.Построение плана положений звеньев механизма (плана механизма) Перед построением плана механизма (рис.2.11) выполним необходимые расчёты. Пусть кривошип 1 на плане механизма будет представлен отрезком АВ = 29 мм. Тогда масштабный коэффициент плана механизма: μl = lAB / AB = 0,29/ 29 = 0,01 м/мм.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 216; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.24.134 (0.201 с.) |
 ведущего звена 1 – кривошипа, длины звеньев и координаты неподвижных точек.
ведущего звена 1 – кривошипа, длины звеньев и координаты неподвижных точек. , м/мм,
, м/мм, , (2.1)
, (2.1) =
=  АО
АО  – скорость точки А, которая равна скорости точки А относительно центра (или оси) вращения кривошипа – точки О;
– скорость точки А, которая равна скорости точки А относительно центра (или оси) вращения кривошипа – точки О;  – вектор относительной скорости точки В шатуна относительно А, он имеет направление, перпендикулярное отрезку АВ на плане механизма.
– вектор относительной скорости точки В шатуна относительно А, он имеет направление, перпендикулярное отрезку АВ на плане механизма. (2.2)
(2.2) ), а вектор относительной скорости точки В относительно С (
), а вектор относительной скорости точки В относительно С (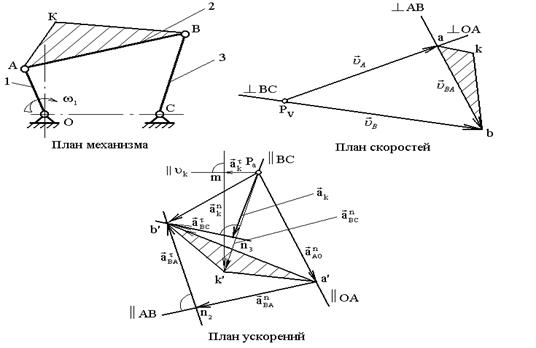
 , м/с.
, м/с. ,
,  ,
, – скорость точки А, м/с,
– скорость точки А, м/с,  – длина отрезка, изображающего на будущем плане скоростей скорость
– длина отрезка, изображающего на будущем плане скоростей скорость  было удобно для расчётов (другими словами – чтобы
было удобно для расчётов (другими словами – чтобы  (полюса плана скоростей) вектор скорости
(полюса плана скоростей) вектор скорости  – линия, перпендикулярная отрезку ВС. Пересечение этих линий даёт точку b. В соответствии с векторными уравнениями (2.1) и (2.2) на построенном плане скоростей наносятся направления (стрелки) векторов
– линия, перпендикулярная отрезку ВС. Пересечение этих линий даёт точку b. В соответствии с векторными уравнениями (2.1) и (2.2) на построенном плане скоростей наносятся направления (стрелки) векторов  и
и 
 перпендикулярен отрезку АК на плане механизма, а вектор
перпендикулярен отрезку АК на плане механизма, а вектор  – отрезку КВ. Построением этих векторных уравнений получаем точку k на плане скоростей. При этом из точки a плана ускорений проводим линию, перпендикулярную отрезку АК, а через точку b плана ускорений – линию, перпендикулярную отрезку ВК плана механизма. Величину скорости точки К можно вычислить по формуле
– отрезку КВ. Построением этих векторных уравнений получаем точку k на плане скоростей. При этом из точки a плана ускорений проводим линию, перпендикулярную отрезку АК, а через точку b плана ускорений – линию, перпендикулярную отрезку ВК плана механизма. Величину скорости точки К можно вычислить по формуле ,
, – длина соответствующего вектора на плане скоростей.
– длина соответствующего вектора на плане скоростей. ,
, и коромысла 3
и коромысла 3  ассчиты-ваются по формулам
ассчиты-ваются по формулам , c-1,
, c-1, , c-1.
, c-1. определяются по направле-ниям векторов
определяются по направле-ниям векторов  соответственно. Для этого необходимо вектор
соответственно. Для этого необходимо вектор 
 нормальная составляющая ускорения точки A относительно O
нормальная составляющая ускорения точки A относительно O .
. параллелен отрезку ОА на плане механизма. Тангенциальная составляющая ускорения
параллелен отрезку ОА на плане механизма. Тангенциальная составляющая ускорения  рассчитывается по формуле
рассчитывается по формуле .
. = 0, тогда
= 0, тогда 

 ,
, параллелен отрезку АВ и направлен от В к А, а тангенциальная составляющая ускорения
параллелен отрезку АВ и направлен от В к А, а тангенциальная составляющая ускорения  перпендикулярна АВ.
перпендикулярна АВ.
 – ускорение точки С, при этом точка С принадлежит опоре, следовательно, неподвижна и
– ускорение точки С, при этом точка С принадлежит опоре, следовательно, неподвижна и  С = 0, а нормальная составляющая ускорения точки В относительно точки С рассчитывается по формуле
С = 0, а нормальная составляющая ускорения точки В относительно точки С рассчитывается по формуле .
. направлен парал-лельно отрезку ВС плана механизма от В к С, а вектор тангенциальной составляющей ускорения
направлен парал-лельно отрезку ВС плана механизма от В к С, а вектор тангенциальной составляющей ускорения  – перпендикулярно отрезку ВС.
– перпендикулярно отрезку ВС. ,
,  , где Раа’ – длина отрезка, изображающего ускорение
, где Раа’ – длина отрезка, изображающего ускорение  n ВА будет изображаться на плане ускорений вектором, имеющим длину
n ВА будет изображаться на плане ускорений вектором, имеющим длину  , мм, а ускорение
, мм, а ускорение  , мм. Затем строится план ускорений (рис.2.8) с использованием составленных векторных уравнений ускорений, в следующей последовательности.
, мм. Затем строится план ускорений (рис.2.8) с использованием составленных векторных уравнений ускорений, в следующей последовательности.  длиной Ра n 3. Перпендикулярно ему через точку n 3 проводят прямую до пересечения с прямой, проведенной через точку n 2 перпендикулярно отрезку АВ. Точка пересечения обозначается буквой b ′, которая, будучи соединена с полюсом Ра, образует отрезок Ра b ′, изображающий вектор полного ускорения
длиной Ра n 3. Перпендикулярно ему через точку n 3 проводят прямую до пересечения с прямой, проведенной через точку n 2 перпендикулярно отрезку АВ. Точка пересечения обозначается буквой b ′, которая, будучи соединена с полюсом Ра, образует отрезок Ра b ′, изображающий вектор полного ускорения  точки В.
точки В. ,
, 



 c-1, – направление углового ускорения
c-1, – направление углового ускорения  определяется по направлению вектора тангенциальной составляющей ускорения
определяется по направлению вектора тангенциальной составляющей ускорения  c-1; направление углового ускорения
c-1; направление углового ускорения  определяется по направлению вектора тангенциальной составляющей ускорения
определяется по направлению вектора тангенциальной составляющей ускорения  и угловое ускорение
и угловое ускорение  или уравновешива-ющего момента
или уравновешива-ющего момента  , приложенных к ведущему звену. Они уравнове-шивают внешние силы, приложенные к механизму. Эти величины нужны, например, для выбора двигателя, приводящего в движение данный механизм.
, приложенных к ведущему звену. Они уравнове-шивают внешние силы, приложенные к механизму. Эти величины нужны, например, для выбора двигателя, приводящего в движение данный механизм. или моменты движущих сил
или моменты движущих сил  , которые:
, которые: и моменты сил сопротивления
и моменты сил сопротивления  , которые:
, которые: и их моменты
и их моменты  (например, силы тяжести при подъеме груза);
(например, силы тяжести при подъеме груза); , где r – плотность материала, V – объем звена детали; силы инерции
, где r – плотность материала, V – объем звена детали; силы инерции  и моменты от сил инерции
и моменты от сил инерции  , где m, JS – масса и массовый момент инерции звена;
, где m, JS – масса и массовый момент инерции звена;  – линейное и угловое ускорения; силы реакций в кинематических парах
– линейное и угловое ускорения; силы реакций в кинематических парах  .
.  , приложенной в центре масс S звена, и к паре сил инерции, момент которой обозначим
, приложенной в центре масс S звена, и к паре сил инерции, момент которой обозначим  :
: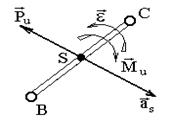
 – главный вектор сил инерции, который в дальнейшем будем называть силой инерции.
– главный вектор сил инерции, который в дальнейшем будем называть силой инерции. – главный момент сил инерции, который в дальнейшем будем называть моментом сил инерции, где m – масса звена, JS – массовый момент инерции относительно центра масс,
– главный момент сил инерции, который в дальнейшем будем называть моментом сил инерции, где m – масса звена, JS – массовый момент инерции относительно центра масс,  – ускорение центра масс,
– ускорение центра масс,  – угловое ускорение звена.
– угловое ускорение звена. и главный момент сил инерции
и главный момент сил инерции  направлены в стороны, противопо-ложные ускорениям
направлены в стороны, противопо-ложные ускорениям  (рис. 2.2). При этом момент сил инерции
(рис. 2.2). При этом момент сил инерции 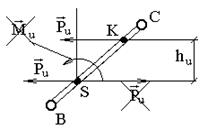
 Вращательная
Вращательная

 Поступательная
Поступательная



 и
и  , а также точки их приложения К 2 и К 3.
, а также точки их приложения К 2 и К 3.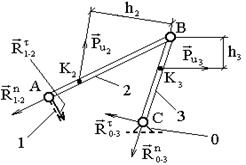
 и
и  , разложив каждую из них на нормальную и тангенциальную составляющие:
, разложив каждую из них на нормальную и тангенциальную составляющие: 
 (2.3)
(2.3)

 и
и  находим путем графического изображения векторного уравнения (2.3) в масштабе, то есть строим план сил структурной группы.
находим путем графического изображения векторного уравнения (2.3) в масштабе, то есть строим план сил структурной группы. , Н/мм, где
, Н/мм, где  – длина вектора в мм, изображающего силу
– длина вектора в мм, изображающего силу  на плане сил, выбирается произвольно. При выборе учитываются два условия: чтобы план сил разместился на отведенном месте чертежа, а масштаб был удобен для расчетов («круглое» число).
на плане сил, выбирается произвольно. При выборе учитываются два условия: чтобы план сил разместился на отведенном месте чертежа, а масштаб был удобен для расчетов («круглое» число). , мм;
, мм;  , мм;
, мм;  мм.
мм. . (2.4)
. (2.4) 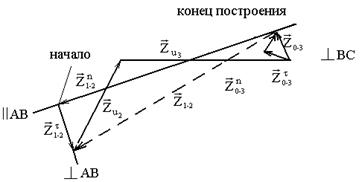


 и
и  берем в мм из плана сил (рис.2.5).
берем в мм из плана сил (рис.2.5). , (2.5)
, (2.5) – сила реакции в кинематической паре В.
– сила реакции в кинематической паре В. Так как силы
Так как силы  и её величину
и её величину 
 .
.
 || OA (исходя из теоремы о трех силах, в соответствии с которой линии сил, действующих на тело, находящееся в равновесии, пересекаются в одной точке. В данном случае это точка А.
|| OA (исходя из теоремы о трех силах, в соответствии с которой линии сил, действующих на тело, находящееся в равновесии, пересекаются в одной точке. В данном случае это точка А. . (2.6)
. (2.6) (рис. 2.8).
(рис. 2.8). . (2.7)
. (2.7) , (2.8)
, (2.8) , (2.9)
, (2.9) и
и  берутся измерением на плане сил (см. рис. 2.8).
берутся измерением на плане сил (см. рис. 2.8).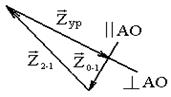
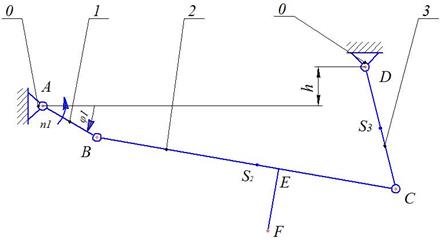
 = 0,75 м, l С D = 0,58 м,
= 0,75 м, l С D = 0,58 м,  = 0,29 м, lAD = 1,5 м, lEF = 0,29 м, l СЕ = 0,55 м, h = 0,18 м; силы веса звеньев: G 2 = 60 Н, G 3 = 50 Н; сила полезного сопротивления P п.с. = 145 Н, приложенная к коромыслу 3 в точке С, противоположно её скорости
= 0,29 м, lAD = 1,5 м, lEF = 0,29 м, l СЕ = 0,55 м, h = 0,18 м; силы веса звеньев: G 2 = 60 Н, G 3 = 50 Н; сила полезного сопротивления P п.с. = 145 Н, приложенная к коромыслу 3 в точке С, противоположно её скорости  .
.