
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Фазовые РНС с частотной селекцией сигналовСтр 1 из 17Следующая ⇒
Лобанов В.А. СИСТЕМЫ РАДИОНАВИГАЦИИ
Конспект лекций по дисциплинам РНП и ЭРНП для студентов судоводительской и электромеханической специальностей очной и заочной формы обучения
Издательство ВГАВТ Н. Новгород, 2007
УДК 621.396.932.1(07.1) Л 68
Лобанов В.А. Системы радионавигации: Конспект лекций по дисциплине Радионавигационные приборы (издание второе). – Н. Новгород.: Изд. ВГАВТ, 2007. – 114 с.
Рассмотрены теоретические основы построения и функционирования основных радионавигационных комплексов (радионавигационные системы, радиолокация, средства автоматизированной радиолокационной проводки и радиопеленгование), автоматические идентификационные системы (АИС), принципиальное устройство и функции приборов, входящих в состав этих комплексов. Книга предназначена для использования в качестве учебного пособия при подготовке инженеров-судоводителей.
Рекомендовано к изданию на заседании кафедры Судовождения и безопасности судоходства (протокол №8 от 28.06.07)
ã ВГАВТ, 2007 ВВЕДЕНИЕ
Предлагаемое пособие представляет собой конспект лекций по дисциплине Радионавигационные приборы, читаемой студентам судоводительского факультета Волжской государственной академии водного транспорта (ВГАВТ). Утверждение новой редакции главы V SOLAS-74 и как следствие обновление учебного плана и рабочих программ всех специальных дисциплин подвигнули автора (ведущего преподавателя данного предмета) к пересмотру объёма и содержания основных разделов настоящего предмета. В свете последних конвенционных требований в качестве основных источников информации и средств решения ряда навигационных задач определены различные приборы: приёмоиндикаторы радионавигационных систем (и в первую очередь современных спутниковых – GPS и ГЛОНАСС), автоматизированные радиолокационные станции (РЛС), средства автоматической радиолокационной проводки (САРП). Кроме того, обязательный состав судового радиооборудования пополнился станциями автоматических идентификационных систем (АИС) и приборами регистрации рейсовых данных. Эксплуатация ряда радиотехнических средств (РЛС, САРП) разрешается специалистам, прошедшим специальную тренажерную подготовку и получившим сертификат международного образца. В свою очередь, проведение такой подготовки требует наличия у обучаемых базовых теоретических знаний по принципам работы упомянутых систем и некоторых первоначальных практических навыков работы с приборами.
Сказанное предопределило более подробное изложение и углубленное изучение материала, касающегося упомянутых систем. Следует отметить, что увеличение объёма выдаваемого материала по современным радиотехническим средствам привело к сокращённому изучению традиционных радиотехнических систем, таких как радиопеленгование. Однако, автор далеко не безоговорочно принимает утверждение ряда специалистов и судоводителей об отмирании радиопеленгования как «навигационного процесса» (хотя средневолновые радиопеленгаторы исключены из конвенционного состава судового радиооборудования) и является явным противником предания забвению данного раздела в учебном процессе. Оправданием тому служит то, что хотя бы в спасательных целях активно используются, по крайней мере, УКВ-радиопеленгаторы. Настоящий конспект охватывает теоретическую часть названной дисциплины и является основным источником получения базовой информации для студентов-судоводителей ВГАВТ.
РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
Общие положения
Радионавигационная система (РНС) – это особый радиотехнический комплекс, в основном предназначенный для определения судами своего местоположения. В качестве дополнительных навигационных задач РНС могут рассчитывать путевой угол, скорость, обеспечивать движение по заданному маршруту, информировать судоводителя о дате, времени и т.д. Особенность такого комплекса заключается в том, что он создаёт в пространстве только ему присущую координатную систему, и определения в ней возможны лишь при наличии на судне специального прибора – приёмоиндикатора этой РНС. Следует заметить, что некоторые РНС (например, среднеорбитальные спутниковые) помимо стандартной координатной сетки (открытой для общего пользования) создают уточнённую. Использование последней защищено либо специальными кодами доступа, либо требует (дифференциальные подсистемы) включения в стандартную схему приёмоиндикатора дополнительных устройств.
Любая РНС состоит из сети радиоизлучателей, используемых в качестве навигационных ориентиров (НО). Замеряя с помощью судового приёмоиндикатора (ПИ) какие–либо характеристики этих ориентиров, можно получить ряд изолиний положения (навигационных параметров, НП). Район пересечения этих изолиний в итоге даст обсервованную позицию судна. В зависимости от замеряемой характеристики навигационного ориентира различают соответствующие виды навигационных параметров. Так, например, для измеренного расстояния – это будет окружность, для разности расстояний – гипербола, для угла – прямая (при определённых допущениях) и пр. Использование параметров двух первых видов очень широко практикуется в современных РНС. В частности, измерения дальности составляют основу спутниковых РНС второго поколения, а разностно-дальномерные – спутниковых систем первого поколения и подавляющего большинства наземных РНС. Для производства измерений дальности требуется высокая степень временной синхронизации в работе навигационных ориентиров и приёмоиндикатора. Сейчас это достигается применением атомных стандартов частоты. При разностно-дальномерном способе измеряется разность расстояний до двух навигационных ориентиров. Этому параметру эквивалентно либо время запаздывания высокочастотного импульса одного ориентира относительно другого, либо разность фаз электромагнитных колебаний, пришедших в точку приёма от этих ориентиров. В первом случае требуется чёткая синхронизация излучений ориентиров, во втором – когерентность их работы. При этом первые системы принято называть импульсными, вторые – фазовыми. Широко распространены наземные РНС, использующие комбинацию этих способов замера. Такие системы называются импульсно–фазовыми.
Классификация РНС
В основу классификации РНС положены различные признаки, основными из которых являются следующие. 1. Вариант размещения навигационных ориентиров 1.1. Спутниковые(GPS, ГЛОНАСС, КОСПАС-SARSAT) 1.2. Наземные (Лоран–с, Чайка) 2. Вид используемого навигационного параметра (вид создаваемых изолиний) 2.1. Дальномерные (GPS, ГЛОНАСС) 2.2. Разностно-дальномерные (Лоран–с, Чайка, КОСПАС-SARSAT) 2.3. Радиально–скоростные 3. Вид измеряемого радионавигационного параметра 3.1. Угломерные 3.2. Импульсные (временные, Лоран–а) 3.3. Фазовые (РСДН) 3.4. Импульсно–фазовые (Лоран–с, Чайка). 3.5. Частотные (Цикада). 4. Диапазон используемых радиоволн 4.1. Сверхдлинноволновые 4.2. Длинноволновые (Лоран–с) 4.3. Средневолновые 4.4. Ультракоротковолновые (Все спутниковые РНС) 5. Дальность действия 5.1. Глобальные (спутниковые РНС) 5.2. Дальнего радиуса действия (дальней навигации, радиус действия до 1500 миль Лоран–с, Чайка) 5.3. Системы средней дальности (радиус действия до 500 миль) 5.4. Системы прибрежного плавания (радиус действия до 100 миль, гидрографическая РНС Хайфикс)
Импульсные РНС
В импульсной РНС линия положения судна определяется в результате измерения в точке приёма разности времени прихода кратковременных высокочастотных импульсов от береговых станций, излучающих сигналы согласованно друг с другом во времени. Обычно одна станция является ведущей, а несколько остальных – ведомыми, излучающими свои колебания после прихода на них импульсов ведущей станции. В точке приёма разность времени прихода импульсов определится:
где Db, Da–расстояния от точки приёма до навигационных излучателей; v–скорость распространения волны; tc–постоянная задержка по времени, обусловленная временем прохождения волны по базовой линии пары станций. Зависимость (2) показывает, что изолиниями в импульсной РНС также, как и в фазовой, являются гиперболы. Между станций пары образуется семейство гипербол, каждая из которых имеет своё значение D t. Иными словами, импульсные РНС обладают однозначностью определений. Это очень важное свойство импульсных РНС предопределило их интенсивное использование в 40–50 годы. Однако точность определения линии положения при измерении Dt с погрешностью 1–2 мкс не может быть лучше нескольких сот метров даже на базовой линии. Практически вследствие влияния пространственных волн, например, в системе Лоран-а, эта точность не превосходит несколько миль (1–3 миль). Импульсно-фазовые РНС
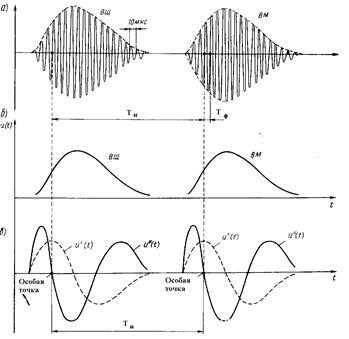
В импульсно-фазовых РНС станции излучают высокочастотные импульсы специальной формы длительностью около 200 мкс с частотой заполнения 100 кГц (рис. 2а). Излучаемые парой станций (ведущая–ведомая) импульсы имеют строгую временную синхронизацию как по моменту их излучения, так и по фазе колебаний, заполняющих импульс. Аналитически каждый импульс можно определить выражением:
где U(t)–форма огибающей импульса; w–угловая частота высокочастотных колебаний (колебаний, заполняющих импульс).
Рис. 2. Принцип работы импульсно–фазовой РНС
Правая часть формулы (3) имеет две составляющие, зависящие от времени, т.е. в принципе разность времени прихода импульсов можно измерить двумя способами: по огибающим U(t) и по высокочастотному заполнению cos (t. Импульсно-фазовые РНС имеют дальний радиус действия, и поэтому точка приёма может находиться в том месте, где возможно взаимоналожение поверхностной и отраженной от ионосферы пространственной радиоволн. Следовательно, возникает необходимость в их распознавании. Пространственный импульс проходит больший путь и потому несколько запаздывает по отношению к поверхностному. Это запаздывание составляет 30–40 мкс. Поэтому для измерений используются только начальные части импульсов (30–40 мкс), где отсутствует наложение пространственного импульса на поверхностный. Разность времён фиксируется по приходу особых точек на огибающих, находящихся в указанных частях импульсов. Формирование особых точек производится двойным дифференцированием огибающих принятых импульсов (рис. 2б, в).
Судовой приёмоиндикатор принимает последовательно импульсы ведущей и ведомой станций и на первом этапе замеряет разность времени их прихода Tи (рис. 2в). Но такие измерения (импульсные) достаточно грубы и требуют уточнений. Уточнение это достигается на втором этапе посредством измерения фазовых сдвигов Tф (рис. 2а) одних и тех же периодов высокочастотных колебаний. Следовательно, грубые измерения должны проводиться с точностью, достаточной для однозначного определения сравниваемых высокочастотных периодов. Точность импульсных замеров находится в пределах нескольких мкс, период высокочастотных колебаний при частоте 100 кГц составляет 10 мкс (рис. 2а), т.е. импульсные замеры позволяют определиться с точностью до высокочастотного периода. Таким образом, из упомянутых выше двух способов измерения навигационного параметра в данных РНС используются оба: по огибающим производятся грубые замеры, по высокочастотному заполнению – точные фазовые замеры. Описанные этапы замеров, по сути, аналогичны процессу устранения многозначности фазовых определений (например, в фазовой РНС Декка). Отличие заключается в том, что в импульсно–фазовой РНС номер точной дорожки (высокочастотный период) находится не понижением частоты сравнения, а при помощи грубых импульсных измерений.
РНС Лоран–с
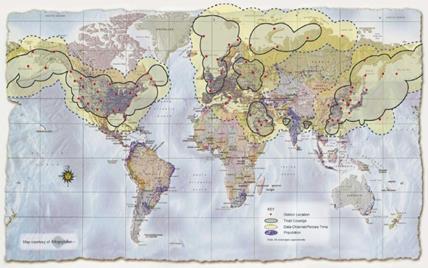
Импульсно-фазовая РНС Лоран-с (LORAN – Long Range Navigation) разработана в США и введена в эксплуатацию в конце 50–х годов взамен импульсной системы Лоран-а. Дальность действия системы составляет до 1200 миль при работе на поверхностных сигналах, среднеквадратическая ошибка определения при этом находится в пределах 100–150 м. Использование пространственных сигналов увеличивает дальность действия системы в два раза с одновременным ухудшением точности определения до 1.5–3.0 миль. В настоящее время эта система эксплуатируется совместно с аналогичной Российской РНС – Чайкой. В совокупности развернуто 31 цепочка этих РНС, которые обслуживают северные части Атлантического, Тихого и западную часть Северного Ледовитого океанов с прилегающими частями континентов (рис. 3). Стандартная цепь состоит из ведущей станции (Master), обозначаемой буквой M и до четырех ведомых (Slave), обозначаемых буквами W,X,Y и Z. Для обеспечения необходимой дальности действия станций требуется большая средняя мощность излучаемого сигнала. Поэтому в Лоран-с формируется сигнал не в виде одиночного импульса, а в виде пакета из 8 импульсов. Опознавание различных цепочек производится по периодам повторения пакетов радиоимпульсов. Периоды повторения объединены в четыре группы:
1. Специальная, обозначаемая буквой S (Special) 2. Медленная высокая, обозначаемая SH (Slow High) 3. Медленная низкая, обозначаемая SL (Slow Low) 4. Медленная специальная, обозначаемая SS (Slow Special) Каждая группа состоит из 8 монотонно уменьшающихся периодов повторения, обозначаемых номерами от 0 до 7.
Рис. 3. Зоны цепочек РНС ЛОРАН-С и Чайка
На навигационных картах для обозначения принадлежности изолинии определённой паре станций над ней может быть надписана частота группы, периода, символ ведомой станции и значение радионавигационного параметра в мкс, например SL3-Y-51850. Однако часто вместо символического обозначения частот группы и периода указываются первые четыре цифры частоты периода. Например, 7970-Y означает, что период повторения пакетов импульсов данной пары 79700 мкс. Соответствие между символьным и цифровым обозначением указывается на навигационной карте. Гиперболические изолинии, образованные парами станций различных цепочек, рассчитаны для поверхностных сигналов и наносятся на карты разными цветами (синим, красным, зеленым).
Спутниковые РНС Общие положения
Спутниковой называют такую РНС, в которой роль навигационных ориентиров выполняют искусственные спутники Земли (ИСЗ). Определяя несколько навигационных параметров в разные моменты времени по одному ИСЗ или по нескольким, но одновременно, можно получить обсервованную позицию судна. Очевидно, что помимо навигационных ориентиров и судовых приёмоиндикаторов такая РНС должна включать в себя наземный управляющий комплекс. Он обеспечивает вывод ИСЗ в космос, слежение за их орбитальным положением, его корректировку в случае необходимости, контроль поставляемой спутниками навигационной, эфемеридной, служебной и другой информации. Отличием спутниковой РНС от наземной является подвижность навигационных ориентиров, положение которых должно быть точно определено для любого момента времени. Это положение постоянно предвычисляется в наземном комплексе системы и через ИСЗ вместе с навигационным сигналом транслируется в бортовые приёмоиндикаторы. Последние рассчитывают по этим данным свою позицию, используя тот или иной метод определения навигационного параметра. Спутниковые РНС классифицируются по виду используемого навигационного параметра и форме орбит. По первому признаку классификации следует различать разностно-дальномерные и дальномерные РНС. Первый вид навигационного параметра является основой РНС первого поколения (КОСПАС-SARSAT), второй – РНС второго поколения (ГЛОНАСС, GPS). По форме орбит РНС бывают низкоорбитальными круговыми полярными (системы первого поколения) и среднеорбитальными круговыми наклонными (системы второго поколения). В первом случае ИСЗ вращаются на орбитах высотой не более 5000 км в мередианальных плоскостях, во втором – на наклонных орбитах высотой около 20000 км. Разностно-дальномерные РНС
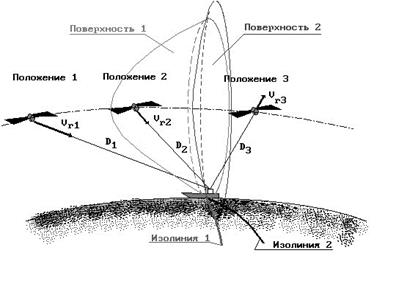
В системах первого поколения измеряется разность расстояний до одного и того же спутника в двух его последовательных положениях на орбите. Использование данного метода основано на эффекте Доплера, суть которого заключается в том, что частота сигнала, излучённого спутником, отличается от частоты того же сигнала, принятого потребителем. Пусть ИСЗ излучает колебания, фаза которых изменяется по закону:
где wи–угловая частота излучаемых электромагнитных колебаний. К потребителю эти колебания придут со сдвигом по фазе:
где t–время движения сигнала от ИСЗ до потребителя:
где D–расстояние от ИСЗ до потребителя (рис. 6); c–скорость электромагнитной волны.
Рис. 6. Принцип работы доплеровской спутниковой РНС
Подставляя (9) в (8) будем иметь:
Продифференцируем зависимость (10) по времени:
Из (11) получим:
где wд–доплеровская частота; wп–угловая частота принимаемых электромагнитных колебаний; vr–скорость сближения (удаления) ИСЗ с потребителем (радиальная скорость, рис. 6). Таким образом, разница частот принятого и излученного сигнала (доплеровская частота) пропорциональна радиальной скорости ИСЗ и потребителя. На этом важном свойстве доплеровской частоты и основано использование данного метода измерения. Преобразуем зависимость (12) к виду:
Проинтегрируем (13) по времени в определенном интервале:
Как видно из уравнения (14) левая часть его (
т.е. интеграл доплеровской частоты пропорционален разности расстояний от потребителя до ИСЗ в двух его последовательных положениях. Делая интервал постоянным, и вычисляя каким–либо способом интеграл доплеровской частоты на смежных участках, можно получить ряд изолиний положения объекта – гипербол (рис. 6), пока спутник находится в зоне радиовидимости. Место их пересечения, приведенное к одному моменту измерения, даст обсервованную позицию. По указанным причинам описанный способ также называется доплеровским интегральным методом, а системы – доплеровскими.
Система КОСПАС–SARSAT
Данная система используется для определения координат потребителей, терпящих бедствие, и передачи их аварийной информации спасательным службам. Для расчёта координат применяется доплеровский метод. Она включает в себя отечественную и зарубежную составляющие: КОСПАС – космическая система поиска и спасания аварийных судов; SARSAT – Search And Rescue Satellite of Aided Tracking. В реализации этого проекта помимо СССР и США приняли участие Канада и Франция. Система состоит из четырех основных частей: 1. Аварийные радиобуи (АРБ). 2. ИСЗ. 3. Пункты приёма информации (ППИ). 4. Центры управления системой (ЦУС). АРБ предназначен для передачи информации о бедствии. Он работает на частоте 406.025 МГц, передавая следующие данные: 1. Регистрационные характеристики АРБ (номер, тип). 2. Код страны. 3. Тип судна и его опознаватели (название, позывной, опознаватель МПС). 4. Количество членов экипажа. 5. Судовладелец. 6. Адрес, телефон и телекс судовладельца. 7. Если имеется устройство ввода информации, то возможна передача характера бедствия. В состав АРБ может быть включён передатчик, работающий на частоте 121.5 МГц или радиолокационный транспондер, которые предназначены для окончательного привода спасательных средств к месту АРБ с помощью УКВ-радиопеленгаторов или судовых РЛС. ИСЗ предназначены для приёма, обработки и ретрансляции сигналов АРБ в ППИ. В данной системе используются околополярные спутники, запущенные на орбиту высотой 850–1000 км. Информация, принятая от АРБ, хранится в запоминающем устройстве ИСЗ и сбрасывается в ППИ на частоте 1544.5 МГц. Сброс информации производится по команде ППИ, когда спутник находится в зоне его видимости. В настоящее время на четырех орбитах вращаются спутники типов "Надежда" и "NOAA". В американских ИСЗ предусмотрена ретрансляция сигналов АРБ на геостационарные ИСЗ системы INMARSAT. ППИ (их около 30) обеспечивает приём, обработку, сортировку сигналов ИСЗ с целью определения координат АРБ. Для этого в ППИ с ЦУС ежесуточно поступают параметры орбитального движения ИСЗ. Обработанная информация по наземным каналам связи направляется в ЦУС. Основными задачами ЦУС являются координация и управление элементами системы, приём, обработка и обмен аварийной и служебной информацией с ППИ, поисково-спасательными службами и зарубежными ЦУС (всего их 5), планирование работы системы, учет и регистрация АРБ, осуществление контроля над прохождением информации. Дальномерные РНС
В системах второго поколения измеряются дистанции до нескольких ИСЗ. Место пересечения полученных сфероидов даст обсервованую позицию. В простейших приёмоиндикаторах (одноканальных) эти измерения производятся последовательно по каждому спутнику, а затем приводятся к одному моменту времени. В более сложных приёмоиндикаторах (многоканальных) измерения производятся сразу по нескольким, а, возможно, и по всем видимым спутникам. Дальность до ИСЗ определяется посредством измерения интервала времени прохождения радиоволны на трассе ИСЗ – потребитель. Временной интервал находится по величине фазового сдвига между двумя кодированными сигналами, один из которых генерируется в аппаратуре ИСЗ, а другой, являясь копией первого - в судовом приёмоиндикаторе. Вполне очевидно, что для таких замеров необходима строгая синхронизация временных шкал приёмоиндикатора, спутника и системы, а также «знание» приёмоиндикатором закона кодирования (закона модуляции) навигационного сигнала спутника. Измеренное таким образом время, по сути, только характеризует дальность, но вследствие влияния различного рода ошибок определяет другой параметр – псевдодальность, поэтому данный способ называют еще псевдодальномерным. Разница дальности и псевдодальности будет ясна из следующей зависимости:
где Ri–псевдодальность до ИСЗ; Rr–дальность до ИСЗ; c–скорость электромагнитной волны; Dtp–рассогласование шкалы времени аппаратуры потребителя относительно шкалы времени системы; Dtc–рассогласование бортовой шкалы времени ИСЗ относительно шкалы времени системы; Dta–временные задержки, вызванные особенностью распространения радиоволн в ионосфере и тропосфере; Dtd–преднамеренно вводимая ошибка. При использовании в аппаратуре потребителя высокостабильного генератора, синхронизированного по сигналам ИСЗ, для целей определения координат объекта в пространстве достаточно выполнить измерения относительно трёх ИСЗ. При отсутствии синхронизации опорных генераторов измерения выполняются относительно четырёх ИСЗ. При этом трёхмерные координаты как точка пересечения трёх сфероидов и поправка временной шкалы потребителя определяются по решению системы четырёх уравнений (16). Для решения задач судоходства достаточно выполнить измерения относительно трех ИСЗ (двухмерная навигация).
РНС ГЛОНАСС и GPS
Состав систем
Спутниковые РНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) и GPS – Global Position System – глобальная система местоопределения (другое её название NAVSTAR – Navigation Satellite Time and Ranging – спутники для измерения времени и дистанции) относятся к системам, использующим в основном псевдодальномерный способ определения, а для решения дополнительных задач (определение скорости) – доплеровский. Они являются РНС второго поколения взамен системам типа Транзит и Цикада, которые обладают рядом недостатков: большой дискретностью в определениях и их недостаточной точностью при решении ряда навигационных задач; невозможностью определения, если судно находится в плоскости орбиты ИСЗ; слабой помехозащищенностью сигналов. Разработка ГЛОНАСС начата в СССР в 1970 году, однако она полностью ещё не развёрнута. Сеть должна состоять из 24 навигационных спутников (3 из которых – запасные), по 8 спутников на трёх орбитах. Высота круговых орбит 18840–19940 км, угол наклона – около 65°, их плоскости разнесены по долготе на 120°. На орбитах спутники размещены равномерно, угол между соседними составляет 45°. Время обращения спутников вокруг Земли 11 час. 16 мин. Разработка GPS начата в США в 1973 г. и к 1995 г. она была полностью введена в эксплуатацию. В настоящее время в ее состав входит 24 основных и несколько дополнительных ИСЗ, расположенных на 6 наклонных круговых орбитах высотой 20200 км. Орбиты равномерно разнесены по долготе. Углы наклонения плоскостей орбит относительно экватора составляют 55°. В каждой из 6 орбитальных плоскостей спутники расположены равномерно. Время обращения спутников вокруг Земли 12 час. Подобный выбор параметров орбит этих систем позволяет обеспечить в любой точке Земли приём радиосигналов не менее четырёх спутников и тем самым решить задачу непрерывного глобального навигационного обеспечения пользователей. Кроме того, период обращения ИСЗ подобран таким, что каждый спутник проходит над одной и той же точкой земной поверхности раз в сутки. Благодаря этому отпала принципиальная необходимость разворачивания глобальной сети станций слежения.
Частотный диапазон
Несущие частоты сигналов ГЛОНАСС расположены в двух полосах частот: первая – в пределах от 1602.5625 МГц до 1615.5 МГц с величиной шага 0.5625 МГц и вторая – от 1246.4375 МГц до 1256.5 МГц с шагом 0.4375 МГц. Каждый спутник работает на двух собственных несущих частотах. Все частоты, излучаемые каждым спутником когерентны, и формируются от высокостабильного атомного стандарта частоты, что обеспечивает одновременное излучение сигналов спутниками. Каждый спутник GPS излучает сигналы на двух несущих частотах: L1=1575.42 МГц и L2=1227.60 МГц (L–начальная буква слова LINK–мера длины около 20 см).
Формат сигналов
В ГЛОНАСС и GPS для передачи навигационной и специальной информации используются шумоподобные сигналы. Они отличаются малой величиной пиковой излучаемой мощности, высокой скрытностью и помехозащищенностью. В ГЛОНАСС для передачи точной навигационной информации обе несущие частоты манипулируются по фазе псевдослучайной двоичной последовательностью (ПСП) с тактовой частотой 5.11 МГц (точный канал), для передачи грубой навигационной информации по фазе манипулируется только вторая несущая частота, причем другим видом ПСП с тактовой частотой 0.511 МГц (грубый канал). ПСП, которые использует ГЛОНАСС, получили название последовательностей максимальной длины (МД). Точный канал является закрытым и предназначен для использования в военных целях. Использование двух частот в нём, помимо прочего, позволяет устранить ионосферные погрешности. В GPS в качестве ПСП используются так называемые М–последовательности. При этом на каждом спутнике также формируется два кодированных сигнала: PPS – Precision Position Sign – сигнал точного положения; SPS – Standart Position Sign – сигнал стандартного (грубого) положения. PPS защищен от несанкционированного доступа сторонними потребителями и позволяет производить навигационные измерения высокой точности. Он имеет тактовую частоту 10.23 МГц и период используемой кодовой последовательности 267 сут. Поэтому, не зная установленного начального состояния этого кода, раскрыть его, а значит, и воспользоваться им для навигационных целей практически невозможно. Каждому спутнику выделяется свой индивидуальный семисуточный интервал этой последовательности, что позволяет однозначно идентифицировать его сигнал в судовом ПИ среди прочих спутников. В конце каждой недели начальное состояние кода на каждом спутнике изменяется по команде наземного комплекса управления. В соответствии с кодом PPS производится манипуляция фазы колебаний обеих частот L1 и L2. Для использования этого сигнала потребители должны предварительно засинхронизировать с высокой точностью свой эталон времени с единым временем GPS, а счислимое место указать с точностью не хуже 2–3 миль. SPS открыт для использования всеми потребителями навигационной информации, и по своей структуре он является кодом Голда. SPS также устанавливается индивидуально для каждого спутника, но в отличие от PPS имеет существенно более короткий период равный 1 мс при тактовой частоте 1.023 МГц. В силу этого псевдодальномерные измерения с его использованием не вызывают затруднений даже при существенных расхождениях счислимого и действительного места объекта, а также его эталона времени и времени системы. Кроме того, кодом SPS каждые 30 с передается ключевое слово HOW, указывающее текущее состояние PPS кода. Поэтому в бортовых ПИ, имеющих дешифратор этого слова (допущенных к использованию навигационной информации повышенной точности), можно осуществить достаточно быстрое вхождение в код PPS. Фазовая манипуляция в соответствии с кодом SPS осуществляется только на одной несущей частоте L1. Защищенный код обеспечивает точность определения места порядка 10 м, стандартный – в пределах нескольких десятков метров. Специальная информация в ГЛОНАСС кодируется методом относительной фазовой телеграфии (ОФТ) со скоростью передачи 50 Бод (1 Бод = 1 двоичному знаку/сек). В GPS для этого по фазе манипулируется SPS код на частоте L1, при этом скорость передачи та же. Специальная информация делится на оперативную и неоперативную. В ГЛОНАСС оперативная информация передается каждым спутником и содержит следующие данные: метки времени; текущее время (год, месяц и дата не передаются); сдвиг шкалы времени спутника относительно шкалы времени системы; сдвиг шкалы времени системы относительного государственного эталона времени и частоты; эфемериды спутника. Оперативная информация передается каждые 30 с и меняется каждые 30 мин. Неоперативная информация (альманах) также передается каждым спутником и содержит данные обо всех спутниках системы: дата закладки альманаха; номера рабочих спутников и их частоты; параметры положения спутников на орбитах; пригодность спутников для навигационных измерений. Неоперативная информация передается каждые 2.5 мин. В GPS специальная информация передается субкадрами продолжительностью по 6 с. Пять субкадров образуют кадр продолжительностью 30 с. Двадцать пять кадров образуют суперкадр продолжительностью 12.5 мин. В первом субкадре передаются частотно–временные поправки, ключевое слово для синхронизации по PPS коду. Во втором и третьем субкадрах – эфемериды. В оставшихся двух субкадрах – системные данные: состояние ионосферы, готовность спутника к работе, дата, 1/25 часть альманаха. Таким образом, оперативная информация передается циклом 30 с, неоперативная (альманах) – циклом 12.5 мин.
Геометрические факторы
В ГЛОНАСС и GPS введено понятие нескольких видов геометрических факторов. Геометрический фактор представляет собой относительную (безразмерную) величину, которая показывает во сколько раз среднеквадратическая ошибка позиционирования или определения скорости объекта превосходит среднеквадратическую ошибку измерений дальности и скорости изменения дальности. В свою очередь, суммарную погрешность измерений определяют три следующих вида погрешностей: погрешности, связанные с источниками излучения – погрешности эфемерид, временные и частотные погрешности радионавигационных сигналов; погрешности на условия распространения радиоволн – ионосферные и тропосферные погрешности, влияющие на задержку сигналов и изменение их несущей частоты, а также погрешности многолучёвости, возникающие вследствие отражения сигналов от палубных устройств и морской поверхности; шумовые и инструментальные погрешности измерений радионавигационных параметров – временных интервалов и доплеровской частоты в судовых приёмоиндикаторах. Среди ряда геометрических факторов следует выделить основные: ГФП – геометрический фактор определения координат места на плоскости. В GPS ему соответствует HDOP – Horisontal Delution Of Precision – горизонтальная потеря точности; ГФПр – геометрический фактор определения координат места в пространстве. В GPS ему соответствует PDOP – Position Delution Of Precision – позиционная потеря точности. Величины геометрических факторов зависят только от взаимного расположения потребителя навигационной информации и видимых спутников. Для малоканальных приёмоиндикаторов (количество параллельных каналов до 6) оптимальным (обеспечивающим минимальное значение геометрических факторов) считается такое созвездие спутников, в котором относительно объекта они равномерно разнесены по горизонту (как минимум три спутника с азимутом 120(), а один спутник находится в зените. Эти приёмоиндикаторы постоянно оптимизируют созвездие используемых спутников по геометрическому фактору, и в реальных условиях это значение редко превышает 5. Многоканальные приёмоиндикаторы (количество параллельных каналов не менее 12) используют практически всё видимое созвездие, и поэтому значение геометрических факторов в них гораздо ниже (в пределах 1). Число это отображается приёмоиндикатором. Поэтому существует возможность постоянного контроля ошибки позиционирования, если известно, что суммарная погрешность измерения дальности по грубым каналам равна 5.2 м. При этом следует помнить, что данное значение погрешности псевдодальности справедливо при отсутствии в этих каналах ПРЕДНАМЕРЕННО вводимых ошибок. Правительства США и России исключили эти ошибки из навигационных сигналов GPS и ГЛОНАСС в мае 2000 г. и январе 2007 г. соответственно, оставив за собой право введения их при возникновении угроз национальным интересам стран.
Дифференциальные подсистемы ДГЛОНАСС и DGPS
Точность определения координат, которую обеспечивают системы GPS и ГЛОНАСС, не превосходит 10 м. Однако для многих потребителей, и в частности, для судовой навигации на ограниченных фарватерах подобная точность н
|
||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 231; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.25.67 (0.138 с.) |
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,


 ,
,


 ) представляет изменение расстояния между объектом и ИСЗ за интервал времени:
) представляет изменение расстояния между объектом и ИСЗ за интервал времени: ,
,
 ,
,



