Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципиальная схема индикатораСодержание книги
Поиск на нашем сайте
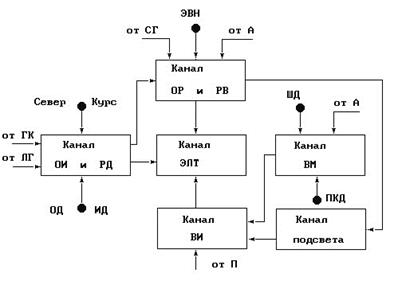
Главное назначение индикатора – это создание радиально-круговой развёртки (временной развертки) луча с целью показа на экране РЛС окружающей обстановки в определённом масштабе. Блок-схема индикатора приведена на рис. 12. Исходя из назначения индикатора, его основным устройством является канал основной развёртки и развёртки электронного визира направления (ОР и РВ). Для создания развёртки луча, синхронной с вращением антенны РЛС и движением излученных импульсов в пространстве используются два переменных тока, которые формируются в подканале (ОР) и подаются в отклоняющую систему ЭЛТ. Эти токи имеют импульсный характер, причём импульсы имеют пологий передний фронт и крутой задний (пилообразные импульсы). Амплитуды этих импульсов модулированы вращением антенны (А) по гармоническому закону (амплитуда одного тока модулирована по закону косинуса, другого – по закону синуса). Отклоняющая система (канал ЭЛТ) состоит из пары катушек, одна из которых под воздействием первого тока формирует магнитное поле, отклоняющее луч ЭЛТ в горизонтальном направлении, другая под воздействием второго тока – в вертикальном направлении. Импульсный характер магнитных полей заставляет луч периодически пробегать от центра к краю экрана в такт с излучениями передатчика (радиальная развёртка), а соотношение амплитуд этих двух полей определяет угловое положение луча на экране ЭЛТ (угловая развёртка). Так как токи (магнитные поля) модулированы вращением антенны, то и положение луча будет изменяться синхронно с вращением антенны. Следует заметить, что начало развёртки (начала пилообразных импульсов) должно происходить строго одновременно с моментом излучения импульсов передатчиком. Для согласования их работы используются импульсы синхронизирующего генератора (СГ). Механизм формирования развёртки электронного визира направления аналогичен описанному выше за тем исключением, что для выработки пилообразных токов используется подканал (РВ), а по амплитуде они модулируются сигналами, идущими от потенциометра (ЭВН), который приводится в действие оператором по мере необходимости поворота визира. Большинство современных РЛС имеют несколько способов ориентировки изображения и могут формировать режимы относительного и истинного движения окружающих объектов. Для этого используется канал
Рис. 12. Схема индикатора РЛС
ориентации изображения и режима движения (ОИ и РД). Способы ориентации могут быть следующими: направление, север, курс. В режиме направление изображение ориентировано относительно диаметральной плоскости судна и представляется так, как его видит судоводитель. При изменении курса изображение поворачивается в сторону противоположную повороту на угол изменения курса. При этом наблюдается кратковременное смазывание изображения в момент поворота, что является недостатком данного режима. В режиме север изображение ориентировано относительно истинного меридиана и остаётся неподвижным при поворотах судна (представляется так, как показано на навигационной карте). Стабилизация изображения происходит по сигналам гирокомпаса (ГК). Режим курс аналогичен режиму север, за тем отличием, что изображение в нем стабилизировано относительно того курса, который указан оператором. При движении собственного судна на экране индикатора, имеющего неподвижный центр развёртки, получается относительное движение, при котором как подвижные, так и неподвижные объекты перемещаются по экрану. Для нахождения вектора истинного движения цели необходимо из вектора её относительного движения вычесть вектор собственного движения. Таким образом, определение истинного движения объектов на таком индикаторе требует геометрических построений, возможных только при некотором интервале времени между наблюдениями. Если центр развёртки непрерывно перемещать в соответствии с перемещением собственного судна, то процесс вычитания векторов будет происходить непрерывно, и все объекты на экране РЛС будут иметь истинное движение. Т.е. основной задачей создания режима истинного движения является перемещение центра развёртки в строгом соответствии с курсом и скоростью собственного судна при данном масштабе изображения. Перемещение центра развёртки обеспечивается магнитными полями двух катушек смещения (одна для вертикального смещения, другая – для горизонтального), находящимися в канале ЭЛТ. Закон смещения вырабатывается в подканале режима движения (РД) по данным лага (ЛГ) и гирокомпаса (ГК). Канал вспомогательных меток (ВМ) формирует импульсы для создания неподвижных и подвижного колец дальности и отметки курса. Подканал подвижного кольца дальности создает импульс с переменной временной задержкой, которая регулируется оператором с помощью потенциометра (ПКД). Подканал неподвижных колец дальности вырабатывает последовательность импульсов, временная задержка которых строго фиксирована для каждой шкалы дальности. Изменение этой задержки производится при помощи потенциометра, связанного с переключателем шкал дальности (ШД). Подканал отметки курса в момент прохождения оси диаграммы направленности антенны (А) в горизонтальной плоскости через диаметральную плоскость судна выдает импульс. Он отбивает на экране метку в виде светящейся радиальной линии (курсовая линия). Курсовая линия используется для опознавания ориентации изображения. Канал подсвета вырабатывает импульсы, которые позволяют наблюдать изображение и вспомогательные метки только во время прямого хода луча развёртки (от центра к краю). Различные сигналы во время обратного хода развёртки, представляющие помехи для наблюдения, на экране не отражаются. Принятые сигналы от приёмника поступают в канал ввода информации (ВИ), где осуществляется их смешивание с метками подвижных и неподвижного колец дальности, отметкой курса и импульсами подсвета. Смешивание происходит в смесителе, являющемся основным устройством канала (ВИ). Полученное в результате смешивания напряжение сложной формы подается на модулятор ЭЛТ. Модулятор – это электрод, управляющий количеством потока электронов, прошедших сквозь него (управляет яркостью засветки луча). В такт с напряжением модулятора изменяется и поток электронов, дошедший до экрана ЭЛТ. В результате на нём наблюдается круговая обстановка в виде радиолокационного изображения совместно со всеми вспомогательными метками. Необходимо отметить, что описанная схема индикатора в большей степени справедлива для устаревших моделей РЛС, выдача информации в которых (как основной, так и вспомогательной) базируется на модуляции луча основной развёртки. Индикаторы современных РЛС – это сложные устройства с обязательным наличием ЭВМ. Основная развёртка в них формирует только изображение окружающего пространства (шкалу дальности), а вся остальная информация строится электронным образом с использованием ЭВМ. Управление функциями РЛС в таком индикаторе осуществляется с помощью многоуровневого меню при обязательном наличии подсказок оператору. Центр экрана индикатора занимает поле развёртки, а по его периферии выводится различного рода дополнительная информация, характеризующая состояние РЛС. Для решения навигационных задач помимо электронных визиров направления, подвижных и неподвижных колец дальности формируется множество вспомогательных элементов. Это - следы послесвечения целей, индексные линии, зоны ограждения, различные маркеры, средства создания элементарных электронных карт и др. Кроме этого современные РЛС, как правило, имеют хотя бы режимы электронной прокладки и автосопровождения целей. Последние позволяют вычислять и строить на дисплее вектора их истинного или относительного движения, оценивать степень их опасности и принимать решение о безопасном расхождении. Такие РЛС сопрягаются с устройствами электронной картографии и приёмоиндикаторами глобальных спутниковых навигационных систем ГЛОНАСС/GPS. Сопоставление радиолокационного изображения района плавания с его электронной картой существенно облегчает ориентировку судоводителя, а визуальный контроль позиции по сигналам навигационных систем (особенно при их работе в дифференциальном режиме) позволяет обеспечить высокую точность проводки судна.
|
|||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 186; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.137 (0.007 с.) |