
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Судовые приёмоиндикаторы РНС Лоран-с
Приёмоиндикаторы по степени автоматизации процессов измерений подразделяют на 3 группы: неавтоматизированные, с визуальным поиском сигналов и производством измерений вручную; полуавтоматические, в которых поиск и начальное совмещение сигналов выполняется вручную, а дальнейшее слежение автоматическое; автоматические, в которых все процессы поиска, совмещения и слежения автоматизированы.
Принцип действия полуавтоматического приёмоиндикатора (КПИ–5Ф)
Приёмное устройство принимает и усиливает сигналы станций, после чего они попадают в индикатор (рис. 5). В индикаторе осуществляются импульсные и фазовые измерения, причём перед точными фазовыми измерениями, выполняющимися автоматически, необходимы импульсные измерения для разрешения многозначности. Последние проводятся полуавтоматически в следующем порядке. Устанавливается частота повторения развертки, равная частоте повторения периодов импульсов принимаемой пары станций. В результате сигналы выбранных станций становятся неподвижными относительно развёртки. Специальные измерительные импульсы совмещаются с сигналами станций выбранной пары. Для этого, кратковременно изменяя частоту развёртки, перемещают сигналы станций до совмещения сигнала ведущей с неподвижным измерительным импульсом. Затем, передвигая подвижный измерительный импульс, совмещают его с сигналом ведомой станции. После выполнения этих операций временная задержка между измерительными импульсами, отображающаяся на табло, будет равна разности времени прихода сигналов ведущей и ведомой станций. Затем включается фазовая система автоматического слежения, поддерживающая совмещение измерительных импульсов с импульсами береговых станций и осуществляющая автоматическое выполнение фазовых измерений.
Рис. 5. Схема типового приёмоиндикатора РНС Лоран-с
Типы судовых приёмоиндикаторов
Все устаревшие модели приёмоиндикаторов обеспечивают только выдачу гиперболических координат, современные преобразуют их в геодезические и, кроме этого, производят решения ряда дополнительных навигационных задач. Типовые приемоиндикаторы приведены в таблице 1. Таблица 1 Типы приёмоиндикаторов РНС Лоран–с
Спутниковые РНС Общие положения
Спутниковой называют такую РНС, в которой роль навигационных ориентиров выполняют искусственные спутники Земли (ИСЗ). Определяя несколько навигационных параметров в разные моменты времени по одному ИСЗ или по нескольким, но одновременно, можно получить обсервованную позицию судна. Очевидно, что помимо навигационных ориентиров и судовых приёмоиндикаторов такая РНС должна включать в себя наземный управляющий комплекс. Он обеспечивает вывод ИСЗ в космос, слежение за их орбитальным положением, его корректировку в случае необходимости, контроль поставляемой спутниками навигационной, эфемеридной, служебной и другой информации. Отличием спутниковой РНС от наземной является подвижность навигационных ориентиров, положение которых должно быть точно определено для любого момента времени. Это положение постоянно предвычисляется в наземном комплексе системы и через ИСЗ вместе с навигационным сигналом транслируется в бортовые приёмоиндикаторы. Последние рассчитывают по этим данным свою позицию, используя тот или иной метод определения навигационного параметра. Спутниковые РНС классифицируются по виду используемого навигационного параметра и форме орбит. По первому признаку классификации следует различать разностно-дальномерные и дальномерные РНС. Первый вид навигационного параметра является основой РНС первого поколения (КОСПАС-SARSAT), второй – РНС второго поколения (ГЛОНАСС, GPS). По форме орбит РНС бывают низкоорбитальными круговыми полярными (системы первого поколения) и среднеорбитальными круговыми наклонными (системы второго поколения). В первом случае ИСЗ вращаются на орбитах высотой не более 5000 км в мередианальных плоскостях, во втором – на наклонных орбитах высотой около 20000 км.
Разностно-дальномерные РНС
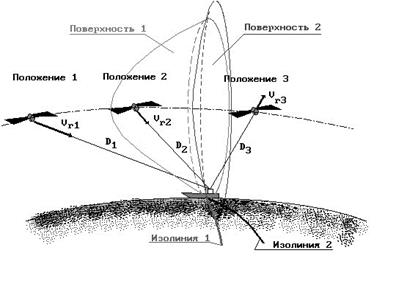
В системах первого поколения измеряется разность расстояний до одного и того же спутника в двух его последовательных положениях на орбите. Использование данного метода основано на эффекте Доплера, суть которого заключается в том, что частота сигнала, излучённого спутником, отличается от частоты того же сигнала, принятого потребителем. Пусть ИСЗ излучает колебания, фаза которых изменяется по закону:
где wи–угловая частота излучаемых электромагнитных колебаний. К потребителю эти колебания придут со сдвигом по фазе:
где t–время движения сигнала от ИСЗ до потребителя:
где D–расстояние от ИСЗ до потребителя (рис. 6); c–скорость электромагнитной волны.
Рис. 6. Принцип работы доплеровской спутниковой РНС
Подставляя (9) в (8) будем иметь:
Продифференцируем зависимость (10) по времени:
Из (11) получим:
где wд–доплеровская частота; wп–угловая частота принимаемых электромагнитных колебаний; vr–скорость сближения (удаления) ИСЗ с потребителем (радиальная скорость, рис. 6). Таким образом, разница частот принятого и излученного сигнала (доплеровская частота) пропорциональна радиальной скорости ИСЗ и потребителя. На этом важном свойстве доплеровской частоты и основано использование данного метода измерения. Преобразуем зависимость (12) к виду:
Проинтегрируем (13) по времени в определенном интервале:
Как видно из уравнения (14) левая часть его (
т.е. интеграл доплеровской частоты пропорционален разности расстояний от потребителя до ИСЗ в двух его последовательных положениях. Делая интервал постоянным, и вычисляя каким–либо способом интеграл доплеровской частоты на смежных участках, можно получить ряд изолиний положения объекта – гипербол (рис. 6), пока спутник находится в зоне радиовидимости. Место их пересечения, приведенное к одному моменту измерения, даст обсервованную позицию. По указанным причинам описанный способ также называется доплеровским интегральным методом, а системы – доплеровскими.
Система КОСПАС–SARSAT
Данная система используется для определения координат потребителей, терпящих бедствие, и передачи их аварийной информации спасательным службам. Для расчёта координат применяется доплеровский метод. Она включает в себя отечественную и зарубежную составляющие: КОСПАС – космическая система поиска и спасания аварийных судов; SARSAT – Search And Rescue Satellite of Aided Tracking. В реализации этого проекта помимо СССР и США приняли участие Канада и Франция. Система состоит из четырех основных частей: 1. Аварийные радиобуи (АРБ). 2. ИСЗ. 3. Пункты приёма информации (ППИ). 4. Центры управления системой (ЦУС). АРБ предназначен для передачи информации о бедствии. Он работает на частоте 406.025 МГц, передавая следующие данные: 1. Регистрационные характеристики АРБ (номер, тип). 2. Код страны. 3. Тип судна и его опознаватели (название, позывной, опознаватель МПС). 4. Количество членов экипажа. 5. Судовладелец. 6. Адрес, телефон и телекс судовладельца.
7. Если имеется устройство ввода информации, то возможна передача характера бедствия. В состав АРБ может быть включён передатчик, работающий на частоте 121.5 МГц или радиолокационный транспондер, которые предназначены для окончательного привода спасательных средств к месту АРБ с помощью УКВ-радиопеленгаторов или судовых РЛС. ИСЗ предназначены для приёма, обработки и ретрансляции сигналов АРБ в ППИ. В данной системе используются околополярные спутники, запущенные на орбиту высотой 850–1000 км. Информация, принятая от АРБ, хранится в запоминающем устройстве ИСЗ и сбрасывается в ППИ на частоте 1544.5 МГц. Сброс информации производится по команде ППИ, когда спутник находится в зоне его видимости. В настоящее время на четырех орбитах вращаются спутники типов "Надежда" и "NOAA". В американских ИСЗ предусмотрена ретрансляция сигналов АРБ на геостационарные ИСЗ системы INMARSAT. ППИ (их около 30) обеспечивает приём, обработку, сортировку сигналов ИСЗ с целью определения координат АРБ. Для этого в ППИ с ЦУС ежесуточно поступают параметры орбитального движения ИСЗ. Обработанная информация по наземным каналам связи направляется в ЦУС. Основными задачами ЦУС являются координация и управление элементами системы, приём, обработка и обмен аварийной и служебной информацией с ППИ, поисково-спасательными службами и зарубежными ЦУС (всего их 5), планирование работы системы, учет и регистрация АРБ, осуществление контроля над прохождением информации. Дальномерные РНС
В системах второго поколения измеряются дистанции до нескольких ИСЗ. Место пересечения полученных сфероидов даст обсервованую позицию. В простейших приёмоиндикаторах (одноканальных) эти измерения производятся последовательно по каждому спутнику, а затем приводятся к одному моменту времени. В более сложных приёмоиндикаторах (многоканальных) измерения производятся сразу по нескольким, а, возможно, и по всем видимым спутникам. Дальность до ИСЗ определяется посредством измерения интервала времени прохождения радиоволны на трассе ИСЗ – потребитель. Временной интервал находится по величине фазового сдвига между двумя кодированными сигналами, один из которых генерируется в аппаратуре ИСЗ, а другой, являясь копией первого - в судовом приёмоиндикаторе. Вполне очевидно, что для таких замеров необходима строгая синхронизация временных шкал приёмоиндикатора, спутника и системы, а также «знание» приёмоиндикатором закона кодирования (закона модуляции) навигационного сигнала спутника.
Измеренное таким образом время, по сути, только характеризует дальность, но вследствие влияния различного рода ошибок определяет другой параметр – псевдодальность, поэтому данный способ называют еще псевдодальномерным. Разница дальности и псевдодальности будет ясна из следующей зависимости:
где Ri–псевдодальность до ИСЗ; Rr–дальность до ИСЗ; c–скорость электромагнитной волны; Dtp–рассогласование шкалы времени аппаратуры потребителя относительно шкалы времени системы; Dtc–рассогласование бортовой шкалы времени ИСЗ относительно шкалы времени системы; Dta–временные задержки, вызванные особенностью распространения радиоволн в ионосфере и тропосфере; Dtd–преднамеренно вводимая ошибка. При использовании в аппаратуре потребителя высокостабильного генератора, синхронизированного по сигналам ИСЗ, для целей определения координат объекта в пространстве достаточно выполнить измерения относительно трёх ИСЗ. При отсутствии синхронизации опорных генераторов измерения выполняются относительно четырёх ИСЗ. При этом трёхмерные координаты как точка пересечения трёх сфероидов и поправка временной шкалы потребителя определяются по решению системы четырёх уравнений (16). Для решения задач судоходства достаточно выполнить измерения относительно трех ИСЗ (двухмерная навигация).
РНС ГЛОНАСС и GPS
Состав систем
Спутниковые РНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) и GPS – Global Position System – глобальная система местоопределения (другое её название NAVSTAR – Navigation Satellite Time and Ranging – спутники для измерения времени и дистанции) относятся к системам, использующим в основном псевдодальномерный способ определения, а для решения дополнительных задач (определение скорости) – доплеровский. Они являются РНС второго поколения взамен системам типа Транзит и Цикада, которые обладают рядом недостатков: большой дискретностью в определениях и их недостаточной точностью при решении ряда навигационных задач; невозможностью определения, если судно находится в плоскости орбиты ИСЗ; слабой помехозащищенностью сигналов. Разработка ГЛОНАСС начата в СССР в 1970 году, однако она полностью ещё не развёрнута. Сеть должна состоять из 24 навигационных спутников (3 из которых – запасные), по 8 спутников на трёх орбитах. Высота круговых орбит 18840–19940 км, угол наклона – около 65°, их плоскости разнесены по долготе на 120°. На орбитах спутники размещены равномерно, угол между соседними составляет 45°. Время обращения спутников вокруг Земли 11 час. 16 мин. Разработка GPS начата в США в 1973 г. и к 1995 г. она была полностью введена в эксплуатацию. В настоящее время в ее состав входит 24 основных и несколько дополнительных ИСЗ, расположенных на 6 наклонных круговых орбитах высотой 20200 км. Орбиты равномерно разнесены по долготе. Углы наклонения плоскостей орбит относительно экватора составляют 55°. В каждой из 6 орбитальных плоскостей спутники расположены равномерно. Время обращения спутников вокруг Земли 12 час.
Подобный выбор параметров орбит этих систем позволяет обеспечить в любой точке Земли приём радиосигналов не менее четырёх спутников и тем самым решить задачу непрерывного глобального навигационного обеспечения пользователей. Кроме того, период обращения ИСЗ подобран таким, что каждый спутник проходит над одной и той же точкой земной поверхности раз в сутки. Благодаря этому отпала принципиальная необходимость разворачивания глобальной сети станций слежения.
Частотный диапазон
Несущие частоты сигналов ГЛОНАСС расположены в двух полосах частот: первая – в пределах от 1602.5625 МГц до 1615.5 МГц с величиной шага 0.5625 МГц и вторая – от 1246.4375 МГц до 1256.5 МГц с шагом 0.4375 МГц. Каждый спутник работает на двух собственных несущих частотах. Все частоты, излучаемые каждым спутником когерентны, и формируются от высокостабильного атомного стандарта частоты, что обеспечивает одновременное излучение сигналов спутниками. Каждый спутник GPS излучает сигналы на двух несущих частотах: L1=1575.42 МГц и L2=1227.60 МГц (L–начальная буква слова LINK–мера длины около 20 см).
Формат сигналов
В ГЛОНАСС и GPS для передачи навигационной и специальной информации используются шумоподобные сигналы. Они отличаются малой величиной пиковой излучаемой мощности, высокой скрытностью и помехозащищенностью. В ГЛОНАСС для передачи точной навигационной информации обе несущие частоты манипулируются по фазе псевдослучайной двоичной последовательностью (ПСП) с тактовой частотой 5.11 МГц (точный канал), для передачи грубой навигационной информации по фазе манипулируется только вторая несущая частота, причем другим видом ПСП с тактовой частотой 0.511 МГц (грубый канал). ПСП, которые использует ГЛОНАСС, получили название последовательностей максимальной длины (МД). Точный канал является закрытым и предназначен для использования в военных целях. Использование двух частот в нём, помимо прочего, позволяет устранить ионосферные погрешности. В GPS в качестве ПСП используются так называемые М–последовательности. При этом на каждом спутнике также формируется два кодированных сигнала: PPS – Precision Position Sign – сигнал точного положения; SPS – Standart Position Sign – сигнал стандартного (грубого) положения. PPS защищен от несанкционированного доступа сторонними потребителями и позволяет производить навигационные измерения высокой точности. Он имеет тактовую частоту 10.23 МГц и период используемой кодовой последовательности 267 сут. Поэтому, не зная установленного начального состояния этого кода, раскрыть его, а значит, и воспользоваться им для навигационных целей практически невозможно. Каждому спутнику выделяется свой индивидуальный семисуточный интервал этой последовательности, что позволяет однозначно идентифицировать его сигнал в судовом ПИ среди прочих спутников. В конце каждой недели начальное состояние кода на каждом спутнике изменяется по команде наземного комплекса управления. В соответствии с кодом PPS производится манипуляция фазы колебаний обеих частот L1 и L2. Для использования этого сигнала потребители должны предварительно засинхронизировать с высокой точностью свой эталон времени с единым временем GPS, а счислимое место указать с точностью не хуже 2–3 миль. SPS открыт для использования всеми потребителями навигационной информации, и по своей структуре он является кодом Голда. SPS также устанавливается индивидуально для каждого спутника, но в отличие от PPS имеет существенно более короткий период равный 1 мс при тактовой частоте 1.023 МГц. В силу этого псевдодальномерные измерения с его использованием не вызывают затруднений даже при существенных расхождениях счислимого и действительного места объекта, а также его эталона времени и времени системы. Кроме того, кодом SPS каждые 30 с передается ключевое слово HOW, указывающее текущее состояние PPS кода. Поэтому в бортовых ПИ, имеющих дешифратор этого слова (допущенных к использованию навигационной информации повышенной точности), можно осуществить достаточно быстрое вхождение в код PPS. Фазовая манипуляция в соответствии с кодом SPS осуществляется только на одной несущей частоте L1. Защищенный код обеспечивает точность определения места порядка 10 м, стандартный – в пределах нескольких десятков метров. Специальная информация в ГЛОНАСС кодируется методом относительной фазовой телеграфии (ОФТ) со скоростью передачи 50 Бод (1 Бод = 1 двоичному знаку/сек). В GPS для этого по фазе манипулируется SPS код на частоте L1, при этом скорость передачи та же. Специальная информация делится на оперативную и неоперативную. В ГЛОНАСС оперативная информация передается каждым спутником и содержит следующие данные: метки времени; текущее время (год, месяц и дата не передаются); сдвиг шкалы времени спутника относительно шкалы времени системы; сдвиг шкалы времени системы относительного государственного эталона времени и частоты; эфемериды спутника. Оперативная информация передается каждые 30 с и меняется каждые 30 мин. Неоперативная информация (альманах) также передается каждым спутником и содержит данные обо всех спутниках системы: дата закладки альманаха; номера рабочих спутников и их частоты; параметры положения спутников на орбитах; пригодность спутников для навигационных измерений. Неоперативная информация передается каждые 2.5 мин. В GPS специальная информация передается субкадрами продолжительностью по 6 с. Пять субкадров образуют кадр продолжительностью 30 с. Двадцать пять кадров образуют суперкадр продолжительностью 12.5 мин. В первом субкадре передаются частотно–временные поправки, ключевое слово для синхронизации по PPS коду. Во втором и третьем субкадрах – эфемериды. В оставшихся двух субкадрах – системные данные: состояние ионосферы, готовность спутника к работе, дата, 1/25 часть альманаха. Таким образом, оперативная информация передается циклом 30 с, неоперативная (альманах) – циклом 12.5 мин.
Геометрические факторы
В ГЛОНАСС и GPS введено понятие нескольких видов геометрических факторов. Геометрический фактор представляет собой относительную (безразмерную) величину, которая показывает во сколько раз среднеквадратическая ошибка позиционирования или определения скорости объекта превосходит среднеквадратическую ошибку измерений дальности и скорости изменения дальности. В свою очередь, суммарную погрешность измерений определяют три следующих вида погрешностей: погрешности, связанные с источниками излучения – погрешности эфемерид, временные и частотные погрешности радионавигационных сигналов; погрешности на условия распространения радиоволн – ионосферные и тропосферные погрешности, влияющие на задержку сигналов и изменение их несущей частоты, а также погрешности многолучёвости, возникающие вследствие отражения сигналов от палубных устройств и морской поверхности; шумовые и инструментальные погрешности измерений радионавигационных параметров – временных интервалов и доплеровской частоты в судовых приёмоиндикаторах. Среди ряда геометрических факторов следует выделить основные: ГФП – геометрический фактор определения координат места на плоскости. В GPS ему соответствует HDOP – Horisontal Delution Of Precision – горизонтальная потеря точности; ГФПр – геометрический фактор определения координат места в пространстве. В GPS ему соответствует PDOP – Position Delution Of Precision – позиционная потеря точности. Величины геометрических факторов зависят только от взаимного расположения потребителя навигационной информации и видимых спутников. Для малоканальных приёмоиндикаторов (количество параллельных каналов до 6) оптимальным (обеспечивающим минимальное значение геометрических факторов) считается такое созвездие спутников, в котором относительно объекта они равномерно разнесены по горизонту (как минимум три спутника с азимутом 120(), а один спутник находится в зените. Эти приёмоиндикаторы постоянно оптимизируют созвездие используемых спутников по геометрическому фактору, и в реальных условиях это значение редко превышает 5. Многоканальные приёмоиндикаторы (количество параллельных каналов не менее 12) используют практически всё видимое созвездие, и поэтому значение геометрических факторов в них гораздо ниже (в пределах 1). Число это отображается приёмоиндикатором. Поэтому существует возможность постоянного контроля ошибки позиционирования, если известно, что суммарная погрешность измерения дальности по грубым каналам равна 5.2 м. При этом следует помнить, что данное значение погрешности псевдодальности справедливо при отсутствии в этих каналах ПРЕДНАМЕРЕННО вводимых ошибок. Правительства США и России исключили эти ошибки из навигационных сигналов GPS и ГЛОНАСС в мае 2000 г. и январе 2007 г. соответственно, оставив за собой право введения их при возникновении угроз национальным интересам стран.
Дифференциальные подсистемы ДГЛОНАСС и DGPS
Точность определения координат, которую обеспечивают системы GPS и ГЛОНАСС, не превосходит 10 м. Однако для многих потребителей, и в частности, для судовой навигации на ограниченных фарватерах подобная точность недостаточна, что официально закреплено в новой редакции главы 5 СОЛАС-74. Для улучшения этой характеристики используется метод дифференциальной спутниковой навигации, который обеспечивает точность до нескольких десятков сантиметров. На основе международных стандартов все судовые приёмоиндикаторы ГЛОНАСС/GPS должны обеспечивать работу в дифференциальном режиме. Системы дифференциальной навигации разделяют на локальные (Local Area Differential GPS), широкозонные (Wide Area Differential GPS, WADGPS) и глобальные (Global Differential GPS, GDGPS). Большинство современных систем дифференциальной навигации являются локальными. Они используют только одну наземную станцию (дифстанцию) измерений и формирования дифференциальных поправок. Дифстанция располагается в центре локальной зоны, размер которой может доходить до 200 км. Она устанавливается в точке с известными географическими координатами. Сравнивая известные координаты (полученные в результате прецизионной геодезической съёмки) с измеренными координатами, базовый навигационный приёмник формирует поправки, которые передаются потребителям по каналам связи. В центре зоны обеспечивается точность местоопределения порядка 0.5 – 1 м. На периферии точность ухудшается и постепенно приближается к точности абсолютных местоопределений. Дифференциальные поправки в локальных системах могут формироваться на основе метода коррекции координат (the position–domain approach) и метода коррекции навигационных параметров (the measurement–domain approach). На практике большее распространение получил второй метод, в котором дифстанция формирует поправки к измерениям псевдодальностей для каждого из видимых ею спутников. Потребитель поправляет свои измерения псевдодальностей по тем же спутникам на значения, полученные от дифстанции. Для передачи поправок, сформированных в соответствии с методом коррекции навигационного параметра, был разработан специальный стандарт RTCM SC-104, учитывающий в настоящее время особенности навигационных систем GPS и ГЛОНАСС. Для приёма упомянутых поправок судовой приёмоиндикатор должен иметь дополнительный приёмник со стандартным интерфейсом RS–232C. Очень интенсивно в настоящее время локальные дифстанции разворачиваются на базе круговых радиомаяков, т. к. средневолновое радиопеленгование отмирает, а использование радиомаяков в новых целях не требует больших затрат. Для передачи отведён диапазон несущих частот 190–415 кГц и 510–535 кГц при использовании минимальной частотной модуляции (MSK). В России на базе круговых радиомаяков предусматривается развернуть 32 контрольный пункта. На данный момент их действует не более десятка. Иностранными государствами активно обустраивается дифференциальными станциями Балтийское море, западное и восточное побережья США. Во всем мире в ближайшие годы будет установлено более 150 опорных дифференциальных станций. В широкозонных системах дифференциальной навигации (WADGPS) используется сеть станций сбора информации (ССИ) и принципиально иной метод формирования дифференциальных поправок. Он получил название – метод коррекции параметров пространства и состояния (the state-space approach). В таких системах измерения навигационного параметра ССИ производятся на обеих частотах. После этого данные ССИ отправляются в единый центр, где осуществляется их совместная обработка с целью уточнения параметров движения КА, смещения шкал времени спутников и составления карт вертикальных ионосферных задержек. Все перечисленные данные затем оперативно передаются тем или иным способом потребителям (обычно через систему геостационарных спутников), которые используют их для уточнения данных. Широкозонные системы дифференциальной навигации обеспечивают точность местоопределения со среднеквадратической ошибкой ~0.5 м в области, охватываемой сетью ССИ, и смежных с ней областях. Важным свойством широкозонных систем является отсутствие потребности в дополнительном судовом приёмнике, т. к. дифференциальные поправки передаются в стандартном формате. В настоящее время в мире известны несколько широкозонных систем дифференциальной навигации. Первая система WADGPS принадлежит фирме Satloc. Вторая система WAAS (Wide Area Augmentation System) принадлежит правительству США. Обе системы развёрнуты и эксплуатируются на территории США. В системе фирмы Satloc потребителю сообщается карта вертикальных ионосферных задержек с шагом 2°. В системе WAAS, в зависимости от класса точности, потребитель может использовать карты вертикальных ионосферных задержек разной точности. Наиболее подробные карты содержат до 929 точек прокола ионосферы (IPP — ionosphere pierce points). Правительства других стран разрабатывают подобные спутниковые навигационные системы. Для Азии следует упомянуть японскую Универсальную Навигационную Спутниковую Систему (MSAS), в Европе это – Европейская Геостационарная Навигационная Служба (EGNOS). Система EGNOS использует сигналы спутников навигационных систем GPS и ГЛОНАСС, двух спутников Inmarsat III (Atlantic Ocean Region - East, Indian Ocean Region) и спутника Artemis, запущенного 12 июля 2001 г. Европейским Космическим Агентством (ЕКА). В EGNOS базовые станции мониторинга системы (RIMS) определяют координаты каждого спутника EGNOS, а также осуществляют непрерывное слежение за всеми спутниками GPS и ГЛОНАСС. Далее станции RIMS передают накопленную информацию на контрольные станции системы (MCC). На станциях MCC формируются дифференциальные поправки EGNOS и происходит вычисление точности сигналов навигационных систем, принятых всеми станциями мониторинга, и погрешностей определения их координат вследствие влияния ионосферы. Затем вычисленные поправки передаются на навигационные станции передачи данных, равномерно расположенные на европейской территории. Эти станции используются для закладки навигационной информации и управления геостационарными спутниками. После этого поправки передаются на три спутника, и они становятся доступны пользователям приемников EGNOS на частоте L1 GPS с модуляцией и кодированием по образцу GPS-сигнала. В будущем планируется развернуть 34 станции RIMS, главным образом размещенные в Европе, а также в Африке, Малайзии, Южной Америки и Канаде. Несмотря на то, что для номинальной эксплуатации EGNOS достаточно использовать одну контрольную станцию и три станции передачи данных, было принято решение об инсталляции 4 станций МСС и 6 станций передачи данных, чтобы гарантировать постоянную работоспособность системы. По своей структуре глобальные системы дифференциальной навигации (GDGPS) очень схожи с широкозонными системами (WADGPS). Они так же используют наземную сеть станций сбора информации и тот же метод формирования дифференциальных поправок (the state-space approach). Основное отличие заключается в том, что исключение ионосферных ошибок в глобальных системах дифференциальной навигации осуществляется путём использования двухчастотных измерений самим потребителем. Перспективы введения гражданских кодов в диапазоне L2 как в GPS, так и в ГЛОНАСС сделают двухчастотные измерения общедоступными. Исключение необходимости вычислять подробные карты вертикальных ионосферных задержек позволяет сильно снизить плотность станций наземной сети. Для этих целей достаточно иметь 12 хорошо расположенных по всему миру станций сбора информации. Для реальных экспериментов использовались 18 станций всемирной глобальной сети GPS (Global GPS Network, GGN) принадлежащей NASA, которые оборудованы двухчастотными навигационными приёмниками. Введение избыточных станций позволяет увеличить точность и надёжность дифференциальной системы. В настоящее время можно указать на существование пока что единственной в мире глобальной системы дифференциальной навигации, использующей в качестве основы станции глобальной GPS сети (GGN) NASA. Для оперативного уточнения орбит навигационных спутников в этой системе используется тот же пакет прикладных программ, который используется в широкозонных дифференциальных системах фирмы Satloc и WAAS. Для передачи измерений в центр обработки используется глобальная сеть Internet. Результаты статических испытаний демонстрируют среднеквадратические ошибки определения горизонтальных координат менее 0.1 м и менее 0.2 м для вертикальных координат. Особенности использования картографических систем при работе с приёмоиндикаторами GPS
Высокая точность определения с помощью приёмоиндикаторов GPS (особенно при работе в дифференциальном режиме) не может быть реализована без учёта системы геодезических координат, в которой составлены навигационные карты. Морские навигационные карты, выпускаемые в России, составлены либо в Пулковской системе координат 1942 г., либо в системе координат ПЗ-90, в США – в системе координат WGS-84 или WGS-72, в других странах мира – в системах координат, принятых в этих странах. Всего таких систем в настоящее время насчитывается более 170. Использование разных систем геодезических координат объясняется тем, что наименьшие погрешности могут быть получены лишь при применении местных систем координат для разных территорий Земли. Простой перенос данных, полученных с помощью приёмоиндикатора GPS в WGS-84, на другие морские карты в случае различия их геодезических основ приводит к погрешностям прокладки. Поэтому в приёмоиндикаторах GPS предусмотрен выбор практически любой из мировых систем координат. Дополнительные возможности по обеспечению решения штурманских задач появились с введением в современные приёмоиндикаторы GPS режима работы с электронными картами. Носителями данных электронных карт являются постоянные запоминающие устройства, встроенные в приёмоиндикаторы или сменные картриджи. Современные электронные карты выполнены в основном в WGS-84 или WGS-72, а наиболее точные для конкретных районов плавания – в местных геодезических базах. Ведущие зарубежные фирмы выпускают каталоги электронных карт. Каждая карта в таком каталоге имеет свой индекс, например, CAN–05E–S40. Сначала указывается наименование страны отображаемой территории (Канада), затем следуют номер карты (05), используемый язык E (английский), S–тип карты (стандартный) (существует 5 типов карт: S–стандартный, С–батометрический, D–детализированный, Е–специальный, Т–с данными навигационных средств), 40–объем информации (40 – 8Мбит, 30 – 4Мбит). Следует заметить, что электронные карты не заменяют морские навигационные карты, однако их совместное использование облегчает работу штурмана.
Судовые приёмоиндикаторы ГЛОНАСС и GPS
Задачи, решаемые судовыми приёмоиндикаторами, подразделяются на первичные и вторичные. К задачам первичной обработки относятся: поиск сигналов по частоте и времени; измерение несущей частоты и фазы принимаемых сигналов; измерение их временной задержки; приём специальной информации (альманаха, эфемерид). Задачи вторичной обработки включают в себя: выбор оптимального созвездия спутников; расчет координат спутников, направляющих косинусов на них, дальностей до спутников, доплеровского сдвига несущих частот сигналов спутников по данным эфемеридной информации и счислимым координатам судна; расчёт и выдача на дисплей координат, времени, скорости, расстройки частоты опорного генератора относительно номинала частоты системы, путевого угла, крена, дифферента и истинного курса судна. Перечень дополнительных (не упомянутых) задач вторичной обработки может быть довольно широк, и обычно он хранится в меню приёмоиндикатора. Задачи первичной обработки решаются в реальном масштабе времени, вторичной обработки – с циклом 1–2 с. Множество типов приёмоиндикаторов можно подразделить на три категории: простейшие (переносные), стационарные и сенсорные (датчики). Простейшие приёмоиндикаторы по внешнему виду похожи на карманные калькуляторы с жидкокристаллическим дисплеем, для приёма сигналов используется встроенная антенна. На диспл
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 319; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.13.255 (0.107 с.) |

 ,
,
 ,
,
 ,
,


 ,
,


 ) представляет изменение расстояния между объектом и ИСЗ за интервал времени:
) представляет изменение расстояния между объектом и ИСЗ за интервал времени: ,
,
 ,
,



