
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Баллистическое проектирование всеазимутальнойСодержание книги
Поиск на нашем сайте
Ю.Л. Кузнецов
БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ ВСЕАЗИМУТАЛЬНОЙ РН С МНОГОРАЗОВЫМ КРЫЛАТЫМ РАКЕТНЫМ БЛОКОМ ПЕРВОЙ Часть 1
СОДЕРЖАНИЕ Введение 1. Комплексная математическая модель всеазимутальной РН ………………… 1.1 Динамическая модель………………………………………………………. 1.2 Методика расчета массовой сводки одноразовой ступени ……………. 1.3 Методика расчета массовой сводки системы спасения КРБ ………….. 1.4 Модель двигательной установки………………………………………….. 1.5 Модель комплекса автономного управления………………...…………… 1.5.1 Программы управления движением центра масс РН и ДУ на атмосферном и безатмосферном участках полета…………………………………………………….…… 1.5.2 Программы управления движением центра масс крылатого ракетного блока на участках маневра возврата и крейсерского полета ………………………………..………… ………
Это первая часть материалов для обучения по курсу, который я должен был прочитать в этом семестре. Вторую часть вышлю позже. Перечень контрольных вопросов, которые будут на экзамене, высылаю вместе с курсом. С силу форс-мажора вопросы, которые я не успел вам прочитать, будете изучать самостоятельно. На экзамене формулы спрашивать не буду, исключением самых простых, - чтобы совсем уж нюх не теряли, а более сложные всегда можно найти, если знать где и что искать. Поэтому мне важно, чтобы вы поняли физические основы и технологии баллистического проектирования РН со спасаемыми ступенями: что, для чего, как, и в какой последовательности делается. Дерзайте.
ВВЕДЕНИЕ
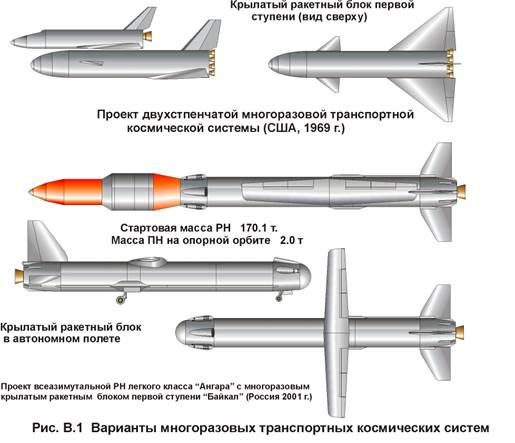
В настоящее время в ряде стран разрабатываются многоразовые транспортные космические системы (МТКС). Примером МТКС являются американская система Space Shuttle и отечественная система «Энергия-Буран», а также проект отечественной РН «Ангара» с полностью многоразовым крылатым ракетным блоком (КРБ) первой ступени «Байкал», оснащенным системой спасения самолетного типа (рис.В.1). Особый интерес представляет начальный этап разработки МТКС, часто называемый баллистическим проектированием. На этом этапе проводится оптимизация проектных параметров конструкции синтезируемого ЛА и его полетных режимов.
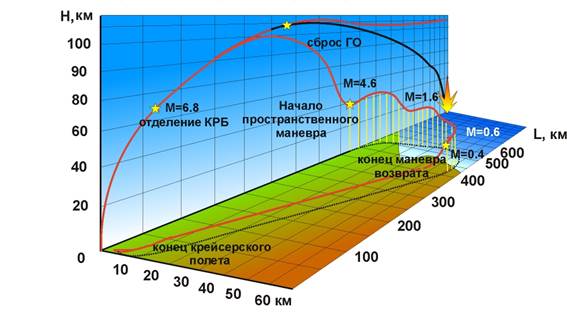
Результаты баллистического проектирования, содержащие информацию об обобщенных параметрах, характеризующих облик рационального варианта МТКС, режимы функционирования и уровень достижимых летно-технических характеристик используются в дальнейшем с целью формирования научно-обоснованных требований на ее создание и для обоснования применяемых технических средств, способов и проектных решений. Настоящее пособие посвящено вопросам разработки комплексной математической модели (КММ) МТКС, являющимся основой и инструментом методологии баллистического проектирования МТКС. Математические модели будем рассматривать на примере анализа и синтеза облика одного из перспективных вариантов МТКС - всеазимутальной РН лёгкого класса с КРБ «типа «Байкал». Заметим, что речь о всеазимутальности, т.е. о возможности осуществления запуска в произвольном направлении, может идти лишь в случае, когда ракетные блоки первых ступеней оснащены системой спасения, обеспечивающей их возвращение в район старта, а остальные отделяющиеся части, например, головной обтекатель, должны выводиться на орбиту или на баллистическую траекторию с последующим падением в акваторию мирового океана. Штатная схема полета двухступенчатой РН с КРБ включает участки полета первой и второй ступеней РН, автономного полета КРБ первой ступени, состоящего из участка маневра возврата и участка крейсерского полета, а также пассивного полета головного обтекателя (рис.В.2). Очевидно, что ключевым элементом будет являться КРБ первой ступени. Многообразие полетных режимов КРБ, сочетающего в себе динамику ракетного способа выведения, маневрирование на предельных режимах в процессе входа в плотные слои атмосферы и крейсерский полет на «самолетных» скоростях при его возвращении в район старта, требует проведения широкого круга теоретических и экспериментальных исследований, лежащих на стыке ракетно-космической и авиационной техники. Конечной целью этой работы является синтез облика оптимального варианта КРБ и средств выведения, разрабатываемых на его основе.
Рис. В.2 Схема полета двухступенчатой РН с КРБ первой ступени
Схема синтеза облика всеазимутальной РН с КРБ представляет собой многоуровневую итерационную последовательность решения формализованных задач, включающих: -обоснование исходного варианта системы; -анализ и согласование проектных параметров, ограничений и управлений базового варианта; -синтез рационального варианта всеазимутальной РН путем совместной оптимизации основных проектно-баллистических параметров, режимов полета и ряда других факторов, в частности, аэродинамической схемы КРБ. Технология синтеза рационального варианта основана на структурной декомпозиции системы, решении частных задач оптимизации в процессе моделирования отдельных участков полета, обеспечивающих локализацию областей существования оптимальных решений на уровне подсистем низшего иерархического уровня и их последующего согласования в процессе интеграции отдельных структурных компонент путем решения оптимизационных задач с использованием полученной априорной информации и критериев оптимальности более высокого иерархического уровня. Процесс баллистического проектирования всеазимутальной РН требует проведения исследований на стыке ряда дисциплин: динамики полета, аэродинамики, теории двигателей, весового проектирования и создания специального математического аппарата, представляющего собой КММ всеазимутальной РН. Ее составными частями являются частные математические модели, отражающие отдельные аспекты структуры и процесса функционирования исследуемого объекта, о чём будет сказано ниже.
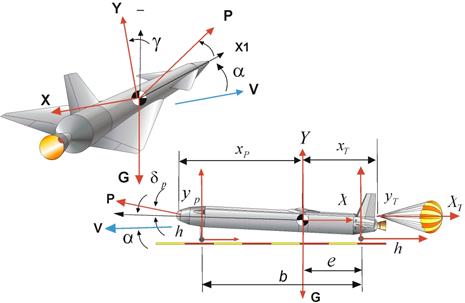
Динамическая модель Основой комплексной математической модели всеазимутальной РН является динамическая модель, описывающая движение РН и ее составных элементов: ракетных блоков и отделяющихся частей на различных этапах полета и объединяющая результаты расчетов, которые выполняются в рамках других моделей. С точки зрения динамики полета наибольший интерес представляет КРБ, сочетающий «ракетную» схему выведения в составе РН, а также управляемый, «по-самолетному», планирующий полёт на участке манёвра возврата и «моторный» (с помощью вспомогательной воздушнореактивной двигательной установки) крейсерский полёт в атмосфере на дозвуковой скорости. Причем, если участок крейсерского полета по режимам движения и нагружению конструкции идентичен полету дозвукового неманевренного самолета, то участок маневра возврата имеет существенные отличия как от участка спуска орбитального самолета, так и от режимов движения обычных самолетов. На этапе баллистического проектирования при исследовании вопросов динамики полета основное внимание уделяется анализу уравнений движения центра масс. При этом, в связи с трудностью получения в процессе синтеза облика ЛА значений демпфирующих аэродинамических моментов, собственных моментов инерции, определяемых по результатам углубленной проработки проекта и экспериментальных исследований, динамические уравнения движения ЛА относительно центра масс заменяются статическими уравнениями моментов внешних сил, предусматривающих взаимную компенсацию на заданном угле атаки моментов относительно центра масс от аэродинамической силы и силы тяги ДУ, отклонённой на соответствующий балансировочный угол. Общий вид уравнений движения определяется выбором системы координат, в проекции на оси которой они записываются, а также полнотой учета сил и моментов, действующих на КРБ в полете и при движении по взлётно-посадочной полосе (ВПП) при посадке. В этой системе координат (рис.1) положение центра масс определяется сферическими координатами: радиусом-вектором, а также геоцентрической широтой и долготой r, Система дифференциальных уравнений, описывающих движение центра масс КРБ в сферически-скоростной системе координат, связанной с вращающейся Землей, имеет следующий вид:
где проекции векторов кориолисовой
где проекции векторов кориолисовой
и
При этом в отличие от традиционного варианта записи системы уравнений движения в сферически-скоростной системе координат, приведенная система уравнений адаптирована к решению задач моделирования маневра возврата и крейсерского полета КРБ, длительное время летящего с дозвуковой скоростью, путем учета меридиональной
Рис.1 Сферически-скоростная система координат
В качестве исходных данных при анализе влияния ветровых составляющих на изменение параметров траектории используется зимнее высотное распределение профиля ветра для района космодрома Плесецк, приведенное на рис.2. Следует также обратить внимание на то, что орты При моделировании пространственного движения ЛА будем считать, что вектор равнодействующей внешних сил -силу притяжения Земли, -равнодействующую вектора аэродинамических сил, -равнодействующую силы тяги ДУ, Определим проекции этих сил на оси сферически-скоростной системы координат. Сила притяжения
где u – гравитационный потенциал Земли. В общем виде гравитационный потенциал Земли представляется в помощью бесконечного ряда, однако в процессе моделирования траектории полета РН при соблюдении приемлемой точности достаточно в разложении ограничиться тремя первыми членами, являющимися сферическими функциями нулевого, второго и четвертого порядков.
где Оценим относительные величины кориолисова
Рис.2 Высотный профиль ветра
Расчеты показывают, что максимальные относительные величины:
С учетом этого определим составляющие ускорения силы притяжения в сферической системе координат
Воспользовавшись матрицей направляющих косинусов между сферической и скоростной системами координат, получаем
Найдем теперь составляющие равнодействующей вектора аэродинамических сил -силы лобового сопротивления X; -подъемной силы Y; -боковой силы Z. При моделировании полета ЛА в атмосфере примем ряд допущений: -система управления обеспечивает ориентацию вектора скорости в плоскости тангажа; -угловые скорости по углам атаки и крена малы, вследствие чего перекрестные аэродинамические связи между каналами тангажа, рыскания и крена отсутствуют; -координаты центра масс и центра давления лежат в плоскости тангажа.
Рис.3 Схема сил, действующих на КРБ в полёте и при движении по ВПП
Перечисленные допущения позволяют при моделировании пространственного движения ЛА в атмосфере избежать учета его аэродинамических характеристик по углу скольжения и за счет этого сократить в два раза необходимый объем аэродинамических данных для ЛА типа крылатых ракетных блоков, не обладающих в отличие от обычных РН аэродинамической симметрией по углам Нецелесообразность использования программы управления по рысканию на атмосферном участке полета обуславливается также и чисто аэродинамическими причинами. Например, на участке маневра возврата КРБ, появление даже небольшого скольжения на умеренных углах атаки, нарушает симметрию вихревой системы вокруг корпуса КРБ, вследствие чего возникает значительная нестационарная боковая сила, вызывающая тряску КРБ и ухудшающая его путевую устойчивость и управляемость. Спроектировав силу лобового сопротивления и подъемную силу на оси скоростной системы координат, получаем
где q – скоростной напор;
Для вычисления характерной площади у крылатых ЛА обычно используют площадь крыла или квадрат размаха крыла. Однако на этапе оптимизации проектно-баллистических параметров КРБ, когда характеристики аэродинамических поверхностей изменяются в процессе расчетов, в качестве характерной площади Определим теперь проекции равнодействующей силы тяги двигательной установки - при управлении на атмосферном участке полета
- при управлении на безатмосферном участке полета
где Наконец, последней составляющей вектора -сила тяжести -суммарная аэродинамическая сила -сила тяги ДУ -реакция поверхности ВПП на стойки шасси -сила трения качения пневматиков шасси Нагрузки на носовую и главные стойки шасси (
Последнее из уравнений представляет собой условие равенства моментов внешних сил относительно центра масс ЛА, где Сделав допущение о том, что поверхность ВПП плоская и не имеет уклона, при моделировании движения ЛА в процессе разбега или пробега, систему уравнений (3.1) можно заменить упрощенной системой, состоящей из двух дифференциальных уравнений
Далее рассмотрим вопросы разработки методик расчета массово-центровочных характеристик РН и КРБ, составляющих внешних сил (аэродинамики и тяги двигательной установки), оценки тепловых режимов, а также создания базы данных аэродинамических характеристик ЛА.
Массовые характеристики РН (масса ПН= …т, масса ГО…т) Таблица 2
Установочный коэффициент Таблица 4
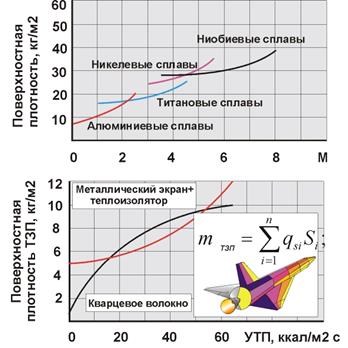
5. Определяются масса теплозащитного покрытия (ТЗП) или лимиты дополнительной массы, расходуемой на изготовление конструкции КРБ из теплостойких материалов. Расчёты начинается с анализа схемы теплового нагружения КРБ (распределения удельных тепловых потоков) на участке манёвра возврата, который проводится с использованием тепловой модели КРБ и параметров траектории (угол атаки, число Маха, плотность атмосферы),. Затем поверхность КРБ аппроксимируется простейшими плоскими панелями. Предполагается, что в пределах панели поверхностная плотность ТЗП или её конструктивное исполнение остаются постоянными. Поверхностная плотность ТЗП определяется в зависимости от величины удельного теплового потока (температуры) по графикам приведенным на рис. 8. Для контроля масса ТЗП должна рассчитываться и по суммарному тепловому потоку, подведенному к расчетной точке за время полета. Выбор критерия расчета массы ТЗП проводится на основе предположения о том, что удельный тепловой поток или суммарное количество подведенного тепла зависит главным образом от параметров траектории и варианта исполнения ТЗП. При крутых траекториях входа, критичными являются предельная величина и интенсивность нарастания теплового потока, влияющая на термические напряжения в конструкции. Для пологих траекторий планирующих гиперзвуковых ЛА, реализующих, режим квазистационарного планирования, определяющим становится суммарное количество подведенного тепла и эффекты, связанные с продолжительностью воздействия высоких температур на конструкцию ЛА, а также прогревом ТЗП и переизлучением тепла внутрь, приводящим к снижению прочности силовых элементов конструкции. Одним из вариантов исполнения аэродинамических поверхностей является применение теплопоглощающей или «горячей» конструкции, предусматривающей изготовление обшивки и силовых элементов конструкции из термостойких материалов и нанесение ТЗП только на отдельные, наиболее теплонапряженные участки поверхности, преимущественно передние кромки. Основное отличие методики расчета теплозащиты при использовании «горячей» конструкции заключается в том, что определение поверхностной плотности ТЗП заменяется вычислением (например, с помощью статистических или графических зависимостей типа представленных на рис.8 и 9) поправочных коэффициентов в весовых формулах, полученных для расчета “холодных” конструкций. Эти коэффициенты учитывают увеличение массы агрегата в результате применения жаропрочных и, как правило, более тяжелых конструкционных материалов, а также изменение их свойств при нагреве. В общем случае при расчете “горячей” конструкции приходится учитывать продолжительность воздействия тепловых потоков. Заметим, что на прогрев толстостенных силовых элементов затрачивается определенное время, в течении которого конструкция может сохранять свою прочность без применения специальных мер для ее теплозащиты. Поэтому, при использовании КРБ со скоростями разделения менее 2100-2000 м/с и незначительным временем воздействия экстремальных тепловых потоков (не более 60-100с), интерес могут представлять и теплопоглощающие конструкции, аккумулирующие тепло в период максимального нагрева. В целом, как показывает сравнение массовых сводок конструкции орбитального корабля и КРБ, относительный вклад ТЗП у последнего уменьшается в 4-4.5 раза (с 12.5-14.5 % до 3.0-3.5%), что до некоторой степени компенсирует влияние погрешностей расчета системы теплозащиты по приближенной методике на точность расчета суммарной массы системы спасения.
Рис.8 Зависимости поверхностных плотностей «горячей» конструкции и теплозащиты для «холодной» конструкции от величины удельного теплового потока
6. Рассчитывается масса шасси. При расчете весь агрегат подразделяется на следующие основные элементы: амортизационные стойки, оси или тележки, колеса и створки. Суммарная масса главных опор шасси рассчитывается по формулам Шейнина:
где
Рис.9 Влияние установившейся температуры на изменение индекса массы конструкции и зависимость изменения температуры внутренней стенки от продолжительности воздействия теплового потока
Если часть конструкции предполагается изготовить из более прочного материала, доля которого в суммарной массе равна
Масса стойки и тележки рассчитывается по следующим формулам
где
где
Ю.Л. Кузнецов
БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ ВСЕАЗИМУТАЛЬНОЙ
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 341; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.147.193 (0.018 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 ,
,  ,связанными с базовой прямоугольной системой координат, а его вектор скорости
,связанными с базовой прямоугольной системой координат, а его вектор скорости  - модулем скорости V, углом наклона к плоскости местного горизонта
- модулем скорости V, углом наклона к плоскости местного горизонта  и курсовым углом
и курсовым углом  , т.е. углом между местной параллелью и проекцией вектора скорости на плоскость местного горизонта. Причем векторы ускорения и равнодействующей внешних сил проектируются на направления касательной к траектории, нормали, лежащей в плоскости векторов
, т.е. углом между местной параллелью и проекцией вектора скорости на плоскость местного горизонта. Причем векторы ускорения и равнодействующей внешних сил проектируются на направления касательной к траектории, нормали, лежащей в плоскости векторов  и
и  , и нормали к этой плоскости.
, и нормали к этой плоскости. ;
; ; (1)
; (1) ;
; ;
; ;
; ,
, и переносной сил
и переносной сил  вычисляются с помощью уравнений
вычисляются с помощью уравнений и переносной сил
и переносной сил  вычисляются с помощью уравнений (2) и (3).
вычисляются с помощью уравнений (2) и (3). =0;
=0; ; (2)
; (2) ;
; ;
; ; (3)
; (3) .
. и широтной
и широтной  ветровых составляющих.
ветровых составляющих.
 ,
,  ,
,  образуют левую тройку векторов. Такая ориентация была выбрана с целью согласования параметров
образуют левую тройку векторов. Такая ориентация была выбрана с целью согласования параметров  ,
,  (рис.3) включает в себя:
(рис.3) включает в себя: ;
; ;
; .
.
 , (4)
, (4) , (5)
, (5)

 - константы, а
- константы, а  ,
,  - полиномы Лежандра второго и четвертого порядка, определяемые по формулам
- полиномы Лежандра второго и четвертого порядка, определяемые по формулам ;
; . (6)
. (6) и центробежного
и центробежного  ускорений, а также вклад двух последних членов в формуле (5). Для этого рассмотрим две точки на траектории полета РН, стартующей с широты 45 град, которые соответствуют моментам отделения КРБ первой ступени (
ускорений, а также вклад двух последних членов в формуле (5). Для этого рассмотрим две точки на траектории полета РН, стартующей с широты 45 град, которые соответствуют моментам отделения КРБ первой ступени ( =1800 м/с,
=1800 м/с,  =53 км,
=53 км,  =23 град) и сбросу головного обтекателя в антиподную точку (
=23 град) и сбросу головного обтекателя в антиподную точку ( =7520 м/с,
=7520 м/с,  =115 км,
=115 км,  =0.7 град).
=0.7 град).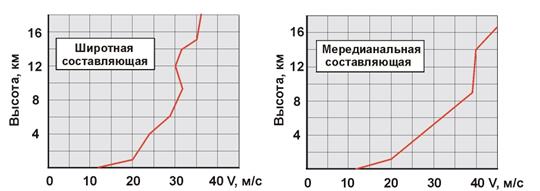
 ,
,  ,
,  ,
,  не превосходят соответственно значений: 2.56, 2.45, 0.08 и 0.00046 % - в первом случае и 10.75, 2.47, 0.079 и 0.00044% - во втором. Поэтому на этапе баллистического проектирования с достаточной степенью точности нормальный потенциал Земли можно заменить следующим приближенным выражением
не превосходят соответственно значений: 2.56, 2.45, 0.08 и 0.00046 % - в первом случае и 10.75, 2.47, 0.079 и 0.00044% - во втором. Поэтому на этапе баллистического проектирования с достаточной степенью точности нормальный потенциал Земли можно заменить следующим приближенным выражением . (7)
. (7)
 (8)
(8)
 ;
; ; (9)
; (9) .
.
 и
и  .
. ;
; ; (10)
; (10) ,
, - коэффициенты силы лобового сопротивления и подъемной силы, отнесенные к характерной площади;
- коэффициенты силы лобового сопротивления и подъемной силы, отнесенные к характерной площади; удобно пользоваться площадью миделя его корпуса, являющейся, как это вытекает из постановочной части задачи (предусматривающей у КРБ наличие одноразового прототипа), величиной постоянной.
удобно пользоваться площадью миделя его корпуса, являющейся, как это вытекает из постановочной части задачи (предусматривающей у КРБ наличие одноразового прототипа), величиной постоянной. связанной системы координат на угол
связанной системы координат на угол  , а на безатмосферном участке траектории, с целью обеспечения пространственного выведения, дополнительно на угол
, а на безатмосферном участке траектории, с целью обеспечения пространственного выведения, дополнительно на угол  в плоскости
в плоскости  имеем
имеем ;
; ; (11)
; (11) ,
, ;
; ; (12)
; (12) ,
, - эффективная тяга ДУ, определяемая как разность между идеальной тягой двигателя (
- эффективная тяга ДУ, определяемая как разность между идеальной тягой двигателя ( ) и потерями (
) и потерями ( ), обусловленными установкой двигателя на конкретный вариант ЛА, нерасчетными режимами работы ДУ и пр.
), обусловленными установкой двигателя на конкретный вариант ЛА, нерасчетными режимами работы ДУ и пр. ;
; ;
; и
и  ) определяются путем решения системы линейных уравнений
) определяются путем решения системы линейных уравнений ;
; (13)
(13) ,
,  - коэффициенты трения качения (для сухого бетонного покрытия и незаторможенных колес:
- коэффициенты трения качения (для сухого бетонного покрытия и незаторможенных колес:  =0.04, для заторможенных:
=0.04, для заторможенных:  - расстояние от поверхности ВПП до продольной оси ЛА при обжатых амортизаторах;
- расстояние от поверхности ВПП до продольной оси ЛА при обжатых амортизаторах; – база и вынос колес главных стоек шасси относительно центра масс;
– база и вынос колес главных стоек шасси относительно центра масс; - координаты ДУ и угол ориентации вектора тяги относительно продольной оси ЛА;
- координаты ДУ и угол ориентации вектора тяги относительно продольной оси ЛА; - коэффициент подъемной силы и коэффициент момента тангажа относительно центра масс ЛА;
- коэффициент подъемной силы и коэффициент момента тангажа относительно центра масс ЛА; - характерная длина ЛА;
- характерная длина ЛА; - координаты узла крепления тормозного парашюта в БСК;
- координаты узла крепления тормозного парашюта в БСК; - коэффициент силы лобового сопротивления и площадь тормозного парашюта;
- коэффициент силы лобового сопротивления и площадь тормозного парашюта; (14)
(14)
 , (21)
, (21) - коэффициент, учитывающий влияние посадочной массы
- коэффициент, учитывающий влияние посадочной массы  и определяемый как
и определяемый как ; (22)
; (22) );
); - коэффициент, учитывающий весовую эффективность шасси в зависимости от числа стоек (
- коэффициент, учитывающий весовую эффективность шасси в зависимости от числа стоек ( ) и имеющий следующие значения:
) и имеющий следующие значения:  - коэффициент, учитывающий свойства применяемых материалов (исходный материал – сталь 30ХГСНА
- коэффициент, учитывающий свойства применяемых материалов (исходный материал – сталь 30ХГСНА 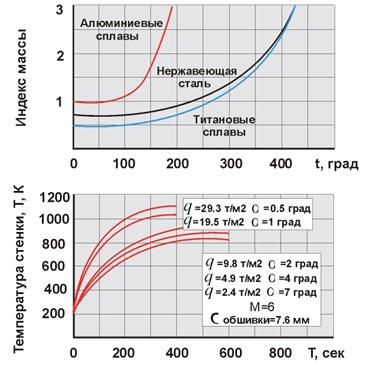
 , то коэффициент
, то коэффициент  . (23)
. (23) ; (24)
; (24) , (25)
, (25) - коэффициент, зависящий от схемы главных стоек шасси (табл.5).
- коэффициент, зависящий от схемы главных стоек шасси (табл.5). - коэффициент весового совершенства (для изделия первого поколения
- коэффициент весового совершенства (для изделия первого поколения  - коэффициент распределения нагрузки на стойку шасси
- коэффициент распределения нагрузки на стойку шасси ;
; - величина относительной нагрузки на носовую стойку шасси (
- величина относительной нагрузки на носовую стойку шасси ( );
); - габаритная высота стойки без усадки амортизатора (расстояние от оси вращения колеса до оси поворота стойки);
- габаритная высота стойки без усадки амортизатора (расстояние от оси вращения колеса до оси поворота стойки); - диаметр колеса;
- диаметр колеса; - показатель степени, учитывающий нелинейную зависимость между длиной стойки и ее массой при
- показатель степени, учитывающий нелинейную зависимость между длиной стойки и ее массой при  .
.


