Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Нахождение критического коэффициента усиления
Выясним при каком коэффициенте усиления система находится на границе устойчивости.
Рисунок 8. Рабочая схема
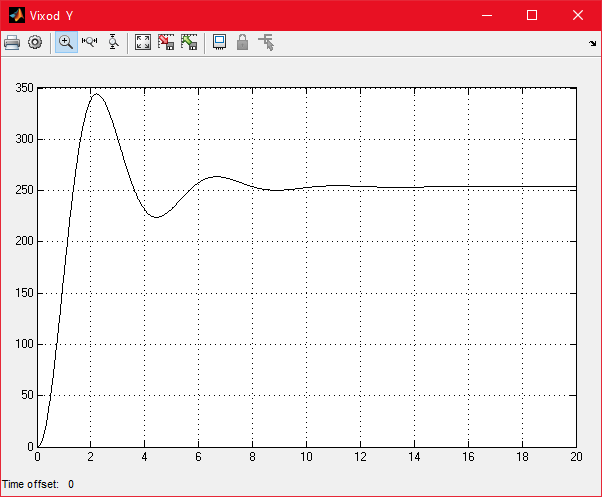
Рисунок 9. Динамическая характеристика Замкнутой САУ при Kkr=2.43
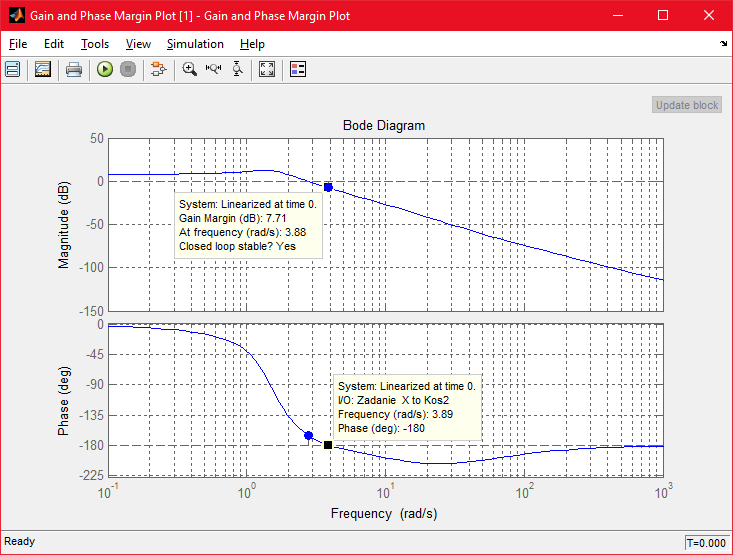
Рисунок 10. Логарифмические амплитудночастотные и фазочастотные характеристики (Боде) при Kkr=2.43
Рисунок 11. Частотные характеристики (Найквист) при Kkr=2.43
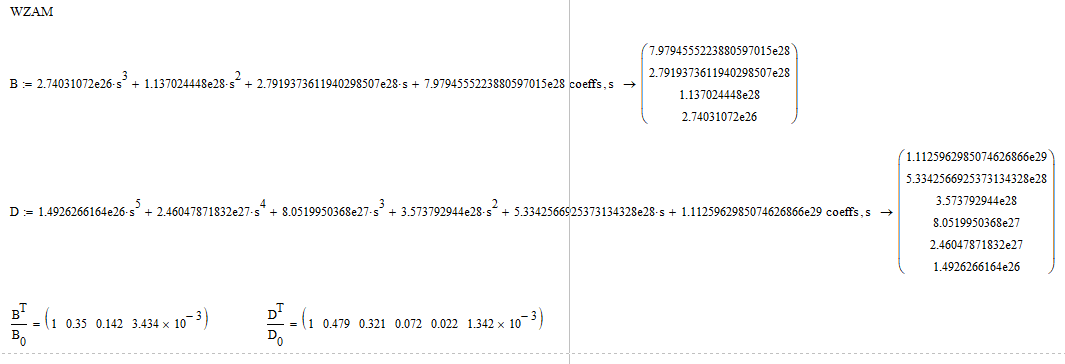
После настройки, выяснили, что система находится на границе устойчивости при коэффициенте усиления равном 2.43. С параметрами:
1.3 Преобразование систем и получение передаточных функций Выполним структурные преобразования системы и получим выражение передаточной функции разомкнутой системы автоматического управления. Исходная модель системы: Перенесем узел против хода сигнала через I1. Звенья I1, A1 соединены последовательно и параллельны звену Kp2. Запишем W1 = Kp2+I1*A1: Звенья W1, ID соединены последовательно и параллельны последовательному соединению звеньев I1, Kp3. W2 = I1*Kp3+W1*ID. . Звенья W2, Kos1 включены встречно параллельно, тогда W3 = W2/(1+W2*Kos1). Звенья Y, W3 соединены последовательно и встречно-параллельны звену Kos1. Запишем W4 = Y*W3/(1+Y*W3*Kos1). После всех сокращений можем записать передаточную функцию разомкнутой системы, Wraz=W4*Kol*Kos2. Теперь определим передаточную функцию по возмущению: После преобразований получим: Сократив исходную систему, посчитаем численно передаточные функции:
Запишем коэффициенты полиномов. Символьно подсчитать их значения не удалось, а значит приведем только численные значения.
Канонический вид передаточной функции разомкнутой САУ:
Канонический вид передаточной функции замкнутой САУ:
Канонический вид передаточной функции замкнутой САУ по возмущению:
Запишем полученные данные в симулинк и промоделируем сокращенную модель.
Рисунок 12. Схема в симулинке
Рисунок 13. Динамическая характеристика передаточной функции замкнутой САУ при входном воздействии равном 100
Рисунок 14. Динамическая характеристика передаточной функции разомкнутой САУ при входном воздействии равном 100
Рисунок 15. Динамическая характеристика замкнутой САУ по возмущению (F=10) Как видно из полученной характеристики, она полностью совпадает с динамической характеристикой исходной САУ (см. стр. 7). Поэтому можно утверждать, что упрощение и получение передаточной функции было выполнено верно. Приведем частотные и логарифмические характеристики:
Рисунок 16. Логарифмическая характеристика полученной передаточной функции
Рисунок 17. Частотная характеристика полученной передаточной функции Как видно из полученных характеристик, они полностью совпадает с характеристиками исходной разомкнутой САУ (см. стр. 5-6). Поэтому можно утверждать, что структурные преобразования выполнены верно. Запишем программу в Matlab: % Исходные данные K = 6.2; T = 0.67; tau = 0.05; ksi = 0.33; Kos1 = 0.8; Kos2 = 0.38; Kp = 1.12;
% Данные для модели Kp2 = Kp; Kp3 = Kp;
% Сокращение схемы Y = K; I1 = tf([1],[T 0]); A1 = tf([K],[T 1]); ID = tf([tau 1],[T 1]); Kol = tf([K],[T*T 2*T*ksi 1]);
W1 = Kp2+I1*A1; W2 = I1*Kp3+W1*ID; W3 = W2/(1+W2*Kos1); W4 = Y*W3/(1+Y*W3*Kos1); Wraz = minreal(simplify(W4*Kol*Kos2))
% Определяем замкнутую систему управления Wz = minreal(simplify(Wraz/(1+Wraz)));
% Определяем замкнутую систему управления по возмущению Wzf = minreal(simplify(-Kol/(1+Wraz)));
figure() step(Wz*100);
%Характеристика Боде figure(); margin(Wraz)
%Характеристика Найквиста figure(); nyquist(Wraz)
Канонический вид передаточной функции разомкнутой САУ:
Канонический вид передаточной функции замкнутой САУ:
Канонический вид передаточной функции замкнутой САУ по возмущению:
Рисунок 18. График переходных процессов замкнутой системы при задающем воздействии равном 100 Рисунок 19. Логарифмические амплитудночастотные и фазочастотные характеристики (Боде) разомкнутой системы Рисунок 20. Частотные характеристики (Найквист) разомкнутой системы Графики программы совпадают с моделированием в Simulink (см. стр 5-7).
CИНТЕЗ САУ Выбор регулятора.
|
|||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 146; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.233.72 (0.015 с.) |