Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Характеристики гребных винтов⇐ ПредыдущаяСтр 21 из 21
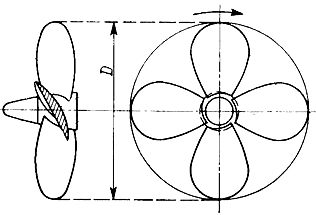
Основные характеристики винта - диаметр, шаг, скольжение и КПД. Диамет р винта D (рис.2.20) называется диаметр окружности, описываемый концами лопастей. Диаметр винта крупных судов доходит до 6,0 м и более.
Рисунок 2.20-Диаметр гребного винт
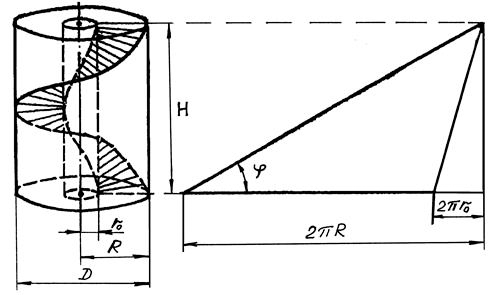
Шаг гребного винта - это расстояние, на которое переместился бы гребной винт за один оборот в твердой среде. Шаг гребного винта одна из важнейших характеристик. Выбор значения шага гребного винта определяется типом судна, для которого предназначен данный гребной винт. Шаг винтовой линии – измеренное вдоль оси расстояние, которое проходит точка за один оборот вокруг оси обозначается Если поступательное и вращательное перемещения равномерны, получается правильная винтовая поверхность постоянного шага; для нее на любом радиусе Нi = 2π ri, tgφ = const, где φ - шаговый угол, то винт называется винтом постоянного или фиксированного шага ВФШ (рис.2.21).
Рисунок 2.21-Образование винтовой поверхности постоянного шага
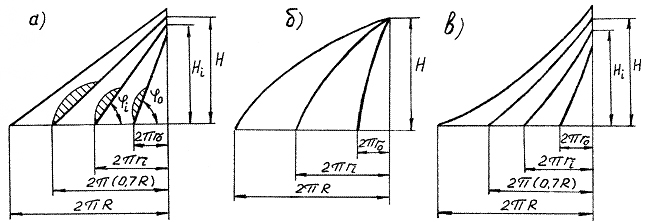
Шаговая винтовая линия для винтов регулируемого шага ВРШ будет выглядеть иначе. Если движение образующей остается равномерным, но шаг винтовых линий на разных радиусах ri имеет различные значения Нi , образуется винтовая поверхность радиально-переменного шага (рис.2.22а). При неравномерном перемещении образующей винтовая поверхность будет осе-переменного шага (рис.2.22б). Если шаг винтовых линий изменяется как вдоль оси, так и по радиусу, получается винтовая поверхность осе-радиально-переменного шага (рис.2.22в).
Рисунок 2.22-Винтовые поверхности переменного шага: а) радиально-переменного шага; б) осе-переменного шага; в) - осе-радиально- переменного шага
Лопасти гребного винта. Поскольку лопасть гребного винта воспринимает гидродинамические силы, измеряемые десятками тонн, она должна обладать достаточной прочностью, т. е. быть телесной. Поэтому засасывающей стороне придают неправильную винтовую поверхность исходя из необходимости обеспечить прочность лопасти и придать обтекаемую форму лопастным сечениям. Рассекая телесную лопасть соосным с винтом цилиндром радиуса г и развертывая контур полученного сечения на плоскость, получаем профиль сечения лопасти на данном радиусе.
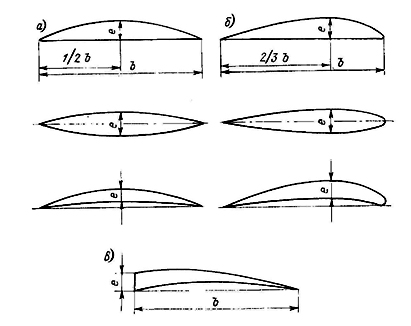
В зависимости от типа и условий работы винта применяют сегментные, авиационные и клиновидные профили (рис.2.23). У сегментных профилей наибольшая толщина находится посредине хорды профиля, у авиационных она смещена к передней кромке в район трети хорды профиля. Как сегментные, так и авиационные профили могут быть плоско-выпуклыми, двояковыпуклыми и выпукло-вогнутыми.
Рисунок 2.23-Профили сечений лопасти гребного винта: а - сегментный; б - авиационный; в - клиновидный
Скольжение. При движении корпус судна увлекает за собой воду, создавая попутный поток, поэтому действительная скорость встречи винта с водой Va всегда несколько меньше, чем фактическая скорость судна V. У быстроходных глиссирующих мотолодок разница невелика - всего 2 - 5%, так как их корпус скользит по воде и почти не “тянет” ее за собой. У катеров, идущих со средней скоростью хода эта разница составляет 5—8 %, а у тихоходных водоизмещающих глубокосидящих катеров достигает 15—20 %. Сравним теперь теоретическую скорость винта Нn со скоростью его фактического перемещения Va относительно потока воды. Разность Hn - Va, называется скольжением. Отношение скольжения к теоретической скорости винта в процентах называется относительным скольжением:
s = (Hn-Va)/Hn [2.37]
Максимальной величины (100 %) скольжение достигает при работе винта на судне, пришвартованном к берегу. Наименьшее скольжение (8—15 %) имеют винты легких гоночных мотолодок на полном ходу; у винтов глиссирующих прогулочных мотолодок и катеров скольжение достигает 15—25%, у тяжелых водоизмещающих катеров 20—40 %, а у парусных яхт, имеющих вспомогательный двигатель, 50 - 70%. Коэффициент полезного действия. Эффективность работы гребного винта оценивается величиной его КПД, т. е. отношения полезно используемой мощности к затрачиваемой мощности двигателя. КПД не кавитирующего винта зависит от относительного скольжения винта, которое в свою очередь определяется соотношением мощности, скорости, диаметра и частоты вращения. Кавитации - вскипания воды и образования пузырьков паров в области разрежения на засасывающей стороне лопасти.
Максимальная величина КПД гребного винта может достигать 70 ~ 80 %, однако на практике довольно трудно выбрать оптимальные величины основных параметров, от которых зависит КПД: диаметра и частоты вращения. Поэтому на малых судах КПД реальных винтов может оказаться много ниже, составлять 45 %. Максимальной эффективности гребной винт достигает при относительном скольжении 10 - 30 %. При увеличении скольжения КПД быстро падает: при работе винта в швартовном режиме он становится равным нулю. Подобным же образом КПД уменьшается до нуля, когда вследствие больших оборотов при малом шаге упор винта равен нулю.
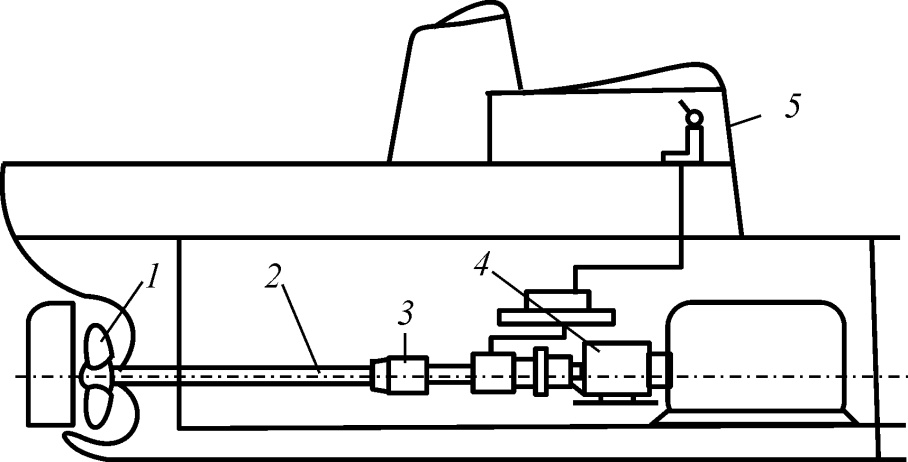
2.4.3 Движительный комплекс с ВРШ. Направляющие насадки Движительный комплекс с ВРШ Для полного использования мощности двигателя при всех значениях сопротивления необходимо, чтобы каждому значению сопротивления соответствовал определенный шаг гребного винта. Для достижения данных условий применяют серию гребных винтов совмещающих в себе гребные винты различного шага в одном движителе называемых ВРШ. Система управления всеми видами ВРШ принципиально одинакова. ВРШ проектируется так, чтобы поворот лопастей винта осуществлялся из рулевой рубки. Обычно установка ВРШ состоит из следующих основных элементов (рис.2.24).
Рисунок 2.24-Установка с ВРШ Гребной винт 1 с поворотными лопастями (ВПЛ), в ступице ВПЛ размещается механизм поворота лопастей (МПЛ); гребной вал 2; механизм изменения шага 3 (МИШ), состоящий из сервомотора, создающего усилие для поворота лопастей, устройства для подведения энергии к сервомотору и устройства, управляющего положением лопастей; силовая часть системы управления 4, которая служит для преобразования имеющейся на судне энергии в такой вид, который наиболее удобен для подведения к сервомотору; пост дистанционной системы управления 5, функции которого заключаются в непосредственном управлении регулирующим элементом силовой части (например, распределительным золотником в ВРШ с гидравлическим приводом). ВРШ классифицируются по:
а) диапазону поворота лопастей: - всережимные - лопасти могут быть зафиксированы в любом положении внутри диапазона «Полный вперед» - «Полный назад», - многопозиционные, обеспечивающие несколько режимов (чаще всего три), - двухпозиционные - лопасти могут быть зафиксированы только в двух положениях, соответствующих крайним точкам диапазона; б) принципу создания усилия, необходимого для поворота лопастей: - гидравлическим - усилие создается в гидравлическом сервомоторе, - электромеханическим - усилие создается электродвигателем, - механическим - усилие создается за счет энергии вращающегося гребного вала, - ручным - перекладка лопастей производится мускульной силой человека; в) принципу построения системы управления винтом системы: - следящая - каждому положению управляющей рукоятки соответствует определенное положение лопастей, т. е. лопасть как бы «следит» за управляющим органом; - не следящая - отклонение рукоятки от нейтрального положения влечет за собой поворот лопасти, а возвращение ручки в нейтральное положение
останавливает лопасть. Наибольшее распространение получили всережимные ВРШ с гидравлическим приводом и следящей системой управления. Винты с поворотными лопастями, или винты регулируемого шага (ВРШ), отличаются от обычных тем, что их лопасти закреплены в ступице винта подвижно и могут поворачиваться вокруг своей оси на заданный угол при помощи особого привода. Этот привод, или механизм изменения шага (МИШ), обычно расположен внутри ступицы винта, поэтому ступица у таких винтов значительно больше, чем у ВФШ. Привод изменения шага бывает механическим, электромеханическим, гидравлическим и электрогидравлическим. В состав МИШ входят: механизм поворота лопастей, размещенный, как правило, в ступице винта; серводвигатель, создающий усилие для поворота лопастей и расположенный на участке между гребным валом и главным двигателем; обратная связь, или устройство, показывающее величину шага винта.
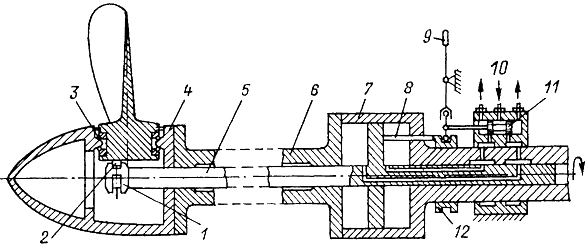
Наиболее распространенным в настоящее время является гидравлический МИШ (рис.2.25), обычно расположенный внутри пустотелого гребного вала. Для поворота лопастей винта используется энергия жидкости (чаще всего масла с малой вязкостью).
Рисунок 2.25-Конструкция МИШ с гидравлическим приводом
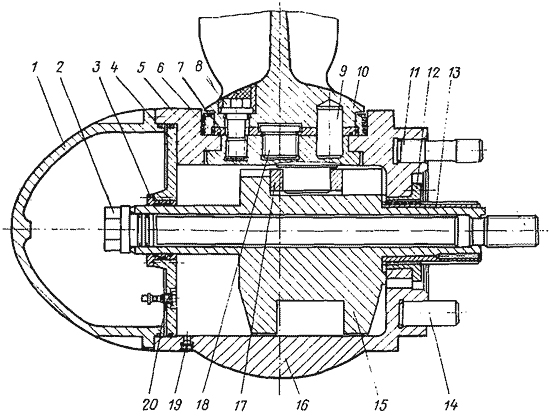
В ступице 4 гребного винта находится поводок 1 штанги 5, размещенной внутри пустотелого гребного вала 6. Поводком 1, в пазу которого расположен палец 2 на комле лопасти, осуществляется поворот этой лопасти вокруг своей оси. Для облегчения поворота комель лопасти посажен в гнездо ступицы винта на двухрядных конических роликоподшипниках 3. На другом конце штанги 5 имеется поршень гидродвигателя 7, соединенный обратной связью 8 с подвижной муфтой 12 и поршнем распределительного золотника 11. Масло в распределительный золотник 11 и гидродвигатель 7 подается через трубку 10 от масляного насоса. Изменение шага лопастей гребного винта осуществляется рычагом 9, нижний конец которого скользит в пазу подвижной муфты. Гидравлический МИШ позволяет управлять шагом гребного винта с ходового мостика при помощи дистанционной пневматической системы. Винты с поворотными лопастями, или винты регулируемого шага (ВРШ), отличаются от обычных тем, что их лопасти закреплены в ступице винта подвижно и могут поворачиваться вокруг своей оси на заданный угол при помощи привода изменения шага (МИШ), обычно расположен внутри ступицы винта (рис.2.26), поэтому ступица у таких винтов значительно больше, чем у ВФШ.
Корпус 16 имеет три радиальные расточки, расположенные под углом 120°, в которые монтируются подшипники лопастей. В носовую часть ввернуто восемь шпилек 11, служащих для крепления ступицы к фланцу гребного вала. Крутящий момент передается четырьмя цилиндрическими штифтами 14. Стык ступицы и фланца гребного вала уплотнен круглым резиновым кольцом. В кормовой части корпус 16 ступицы закрыт обтекателем 1, стык между ними уплотнен резиновым кольцом. Для стравливания воздуха из полостей ступицы при заливке и сливе масла установлены две пробки 19. Узел подшипника лопасти состоит из шайбы лопасти 7 и пальцевой шайбы 5, которые центруются между собой штифтами 9. Шайба лопасти 7 и пальцевая шайба 5 смонтированы на упорном бурте корпуса ступицы и стянуты резьбовой втулкой 18. Узел подшипника лопасти уплотнен резиновыми манжетами, расположенными в манжетодержателе 6.
Рисунок 2.26-Конструкция винта с поворотными лопастями (ВПЛ) ВР-503
Манжетодержатель крепится к шайбе лопасти 7 болтами. Лопасть 10 центруется на двух штифтах 9 и крепится к подшипнику лопасти шестью болтами 8. В ступице расположен кулисный механизм (ползун 15, сухарь 17, пальцевая шайба 5), преобразующий при изменении шага винта возвратно-поступательное движение ползуна в поворотное движение лопастей, установленных на подшипнике скольжения. Ползун 15 перемещается в шлицевой шайбе 12 и в кормовом подшипнике 3, установленном в кормовой стенке 4, и удерживается от поворота шлицевой втулкой 13. Ползун имеет три паза, в которых расположены сухари 17. Внутри ползуна проходит стяжной болт 2, соединяющий ползун 15 со штангой гребного вала. Кормовая стенка 4 отделяет полость ступицы со смазочным маслом от воздушной полости обтекателя 1. Кормовой конец ползуна 15 (при движении в корму) выходит из масляной полости в воздушную полость обтекателя 1. Поскольку диаметр кормового конца ползуна равен диаметру носового конца штанги гребного вала, то общий объем полости вала ступицы не изменяется. Таким образом, полость обтекателя является компенсатором объема. Для предотвращения обрыва обтекателя в случае, если полость его окажется заполненной постепенно просачивающейся через уплотнения жидкостью (маслом или водой), в кормовой стенке 4 установлено два клапана 20, предназначенных для стравливания просачивающейся жидкости из воздушной полости обтекателя во внутреннюю полость ступицы.
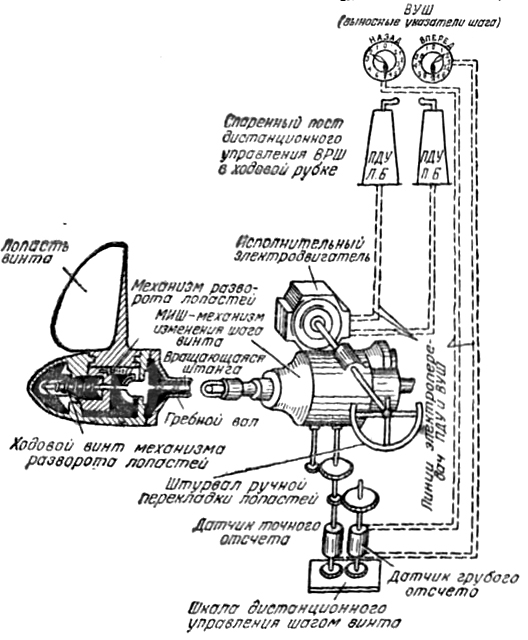
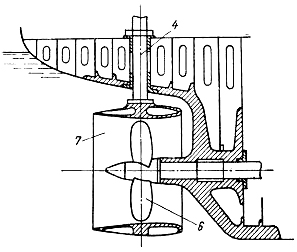
Рисунок 2.27-Принципиальная схема ВРШ Назначение направляющих насадок - улучшение управляемости судна при малых скоростях хода. К средствам активного управления судном относятся: активные рули, поворотные направляющие насадки, подруливающие устройства, винторулевые колонки. Активный руль (рис.2.28) представляет собой обычный руль, в пере 1 которого установлен небольшой гребной винт 2 в насадке, приводимый в действие от электродвигателя или гидромотора 3.
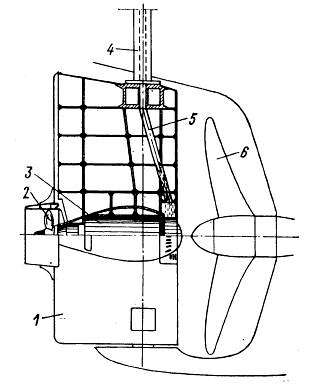
Рисунок 2.28-Устройство активного руля: 1 - перо руля; 2 - гребной винт активного руля; 3 - приводной двигатель; 4 - баллер; 5 - трубопровод; 6 - гребной винт При перекладке активного руля этот гребной винт создаёт упор, поворачивающий корму судна даже при отсутствии хода. Активные рули применяют на некоторых промысловых и исследовательских судах. Поворотная направляющая насадка (рис.2.29) представляет собой профилированный цилиндр 7, диаметр которого несколько больше диаметра гребного винта. Насадка устанавливается на баллере 4 вместо руля так, чтобы она охватывала гребной винт 6. Управление движением судна осуществляется перекладкой насадки с одного борта на другой: при этом изменяется направление отбрасываемого гребным винтом потока воды, и усилие упора винта оказывается направленным под углом к ДП. Кроме того, поворотная насадка позволяет при одинаковой мощности энергетической установки увеличить скорость на 2-4 %
Рисунок 2.29-Поворотная насадка
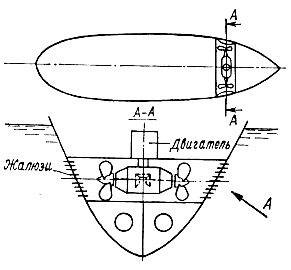
Поворотные насадки применяются на служебно-вспомогательных и некоторых промысловых судах. Подруливающие устройства туннельного типа (рис.2.30) получили широкое распространение. В трубе, расположенной в носовой (реже кормовой) оконечности судна перпендикулярно к ДП со сквозными выходами на оба борта, закрываемыми обычно жалюзи, размещают гребной винт, крыльчатый движитель или водомёт. Они создают направленную перпендикулярно ДП судна струю воды, а следовательно и упор, под действием которого поворачивается нос (или корма) судна. Рисунок 2.30-Расположение подруливающего устройства на судне
Применяется подруливающие устройства чаще всего на пассажирских и крупнотоннажных грузовых судах. Применение подруливающих устройств позволяет производить швартовку без использования буксиров, что снижает портовые расходы. Винторулевые колонки (ВРК) (рис.2.31) представляют собой одновременно и средство создания движения, и средство управления. В настоящее время ВРК находят всё более широкое применение на судах. Полноповоротные винторулевые колонки позволяют направить создаваемое гребным винтом усилие под любым углом к ДП, что обеспечивает наилучшую управляемость судна. Обычно на судне устанавливают два таких агрегата на одном шпангоуте – по одному с каждого борта.
Рисунок 2.31-Общий вид винторулевой колонки: 1 - основание колонки; 2 - цилиндрическая труба баллера; 3 - вертикальный приводной вал; 4 - угловой редуктор; 5 - обтекаемая гондола; 6 - гребной винт; 7 - вал гребного винта; 8 - колокол; 9 - шестерня-подшипник; 10 - защитная обечайка
2.4.4 Ходовые испытания судов.
Ходовые испытания — технологический этап сдаточных испытаний, целью которых является проверка работы оборудования и его параметров на ходовых режимах, а также проверка мореходных качеств судна (плавучести, остойчивости, управляемости, ходкости, маневренности, прочности на волне). Ходовые испытания разделяют на заводские и сдаточные. В процессе заводских ходовых испытаний выполняют наладочно-регулировочные работы и подготовку оборудования к ходовым сдаточным испытаниям. На заводских ходовых испытаниях проверяют спецификационные характеристики главных судовых двигателей по мощности, расходам топлива и масла, времени развития полной мощности. Эта проверка производится на различных режимах работы: на экономическом ходу, крейсерском ходу, полном и самом полном ходу при работе всех двигателей, заднем ходу. Одновременно с проверкой энергетической установки производится определение скорости и маневренности судна. Скорость определяется при прохождении мерной линии, обозначенной створными знаками. При скорости 18 уз судно должно пройти мерную линию в одну милю, при скорости свыше 18 до 36 уз — в две мили, при скорости свыше 36 уз — в три мили. Так достигается достаточная точность определения скорости. Скорость определяют как среднее значение из замеров на нескольких галсах. Программой ходовых испытаний предусматривается определение поворотливости судна на малом, экономическом, крейсерском и полном ходу. Поворотливость характеризуется элементами циркуляции: диаметром циркуляции (расстоянием между линиями обратных курсов при изменении направления на 180°), продолжительностью циркуляции, углом крена при циркуляции, потерей скорости. Диаметр циркуляции определяют в длинах корпуса судна. Замер производится штатными радиолокационными станциями судна или специальной аппаратурой. В длинах корпуса определяют и выбег судна по инерции. При проверке инерции определяется также время с момента подачи команды до полной остановки судна или достижения определенной скорости. Проверку и окончательную приемку оборудования при ходовых сдаточных испытаниях производят на ходу судна при условиях, обеспечивающих получение номинальных параметров. Согласно требованиям нормативных документов проверку оборудования проводят при нормальных климатических условиях (атмосферное давление 1,01 • 105 Па, температура 293 К, относительная влажность 70%), при силе ветра не более 3 баллов по шкале Бофорта с учетом глубины и скорости течения в районе испытаний. По окончании сдаточных ходовых испытаний судна производят ревизию главных и вспомогательных механизмов и устройств по списку, составленному приемной комиссией. В список заносятся те механизмы и устройства, в работе которых замечены недостатки. Ревизия заключается во вскрытии этих механизмов и устранении недостатков, замеченных комиссией. После ревизии судно идет на контрольный выход. Если у комиссии замечаний больше нет, то подписывается акт о сдаче и приемке судна.
Вопросы для самоконтроля: 1. Составляющие сопротивления движению судна, испытания моделей судов? 2. Судовые движители, характеристики гребных винтов? 3. Движительный комплекс с ВРШ, направляющие насадки? 4. Ходовые испытания судна? Рекомендуемая литература [ 2, 3, 4, 9, 10 ]
СПИСОК литературы Основная литература 1 Горячев А.М «Устройство и основы теории морских судов». Издательство / Книга по требованию / Горячев А.М. 2013 – 224 с. 2 Донцов С.В. «Основа теории судна». Одесса / 2013 – 265 с Дополнительная литература 3 Окунев М.М. «Теория и практика кораблестроения». Издательство –Книга по требованию / М.М. Окунев, 2013. – 300 с. 4 Крылов А.Н. «Теория корабля». Издательство. Книга по требованию / А.Н. Крылов, 2013. – 350 с. Электронные ресурсы
5 Кеслер, А.А. Теория и устройство судна.Ч.2. Основы остойчивости [Электронный ресурс] — Электрон. дан. — Нижний Новгород: ВГУВТ, 2014. — 80 с. — Режим доступа: https://e.lanbook.com/book/51561
6 Борисов, Н.Н. Эксплуатация судовых вспомогательных механизмов, устройств и систем [Электронный ресурс]: учеб. пособие / Н.Н. Борисов, Н.А. Пономарев, С.Г. Яковлев. — Электрон. дан. — Нижний Новгород: ВГУВТ, 2014. — 64 с. — Режим доступа: https://e.lanbook.com/book/60799
7 Кеслер, А.А. Теория и устройство судна.Часть 1 [Электронный ресурс] — Электрон. дан. — Нижний Новгород: ВГУВТ, 2012. — 68 с. — Режим доступа: https://e.lanbook.com/book/44871
8 Сень, Л.И. Судовые котельные и паропроизводящие установки: Курс лекций [Электронный ресурс]: учебное пособие. — Электрон. дан. — Владивосток: МГУ им. адм. Г.И. Невельского (Морской государственный университет им. адмирала Г. И. Невельского), 2011. — 239 с. — Режим доступа: http://e.lanbook.com/books/element.php?pl1_id=20158
9 Соболенко, А.Н. Судовые двигатели внутреннего сгорания: Курс лекций [Электронный ресурс]: учебное пособие. — Электрон. дан. — Владивосток: МГУ им. адм. Г.И. Невельского (Морской государственный университет им. адмирала Г. И. Невельского), 2009. — 117 с. — Режим доступа: http://e.lanbook.com/books/element.php?pl1_id=20160
10 Геец В.М. Специальные системы наливных судов. Курс лекций: учебное пособие [Электронный ресурс]: учебное пособие. — Электрон. дан. — Владивосток: МГУ им. адм. Г.И. Невельского (Морской государственный университет им. адмирала Г. И. Невельского), 2012. — 185 с. — Режим доступа: http://e.lanbook.com/books/element.php?pl1_id=20054
Е. А. Крупенко
ТЕОРИЯ И УСТРОЙСТВО СУДНА
Курс лекций для студентов (курсантов) специальности 26.02.05 «Эксплуатация судовых энергетических установок» профиля технического очной и заочной формы обучения (2 часть)
Судомеханический техникум ФГБОУ ВО «Керченский государственный морской технологический университет» 298309 г. Керчь, Орджоникидзе, 123.
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 620; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.160.14 (0.079 с.) |
 .
.