Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Оптимальные автоматические системыСодержание книги Поиск на нашем сайте
Управления
В обычных автоматических системах управления требуемое значение управляе-мой величины задавалось заранее либо постоянным (в системах стабилизации), ли-бо изменяющимся по заданной программе во время (системы программного управ-ления). Оптимальные системы управления сами ищут наивыгоднейшую програм-му, т.е. значение управляемой величины, которое нужно в данный момент выдер-живать, чтобы режим работы управляемого объекта был оптимальным (наивыгод-нейшим). Обязательным условием оптимальной системы управления является на-личие экстремума (максимума или минимума). Поэтому эти системы иногда назы-вают экстремальными по оптимизируемому параметру. Эта характеристика пред-ставляет собой зависимость оптимизируемого параметра от управляемой вели-чины. Экстремальной, например, является зависимость расхода горючего Q в дви-гателе от скорости его вращения n при постоянной нагрузке M
Рис. 37. Семейство экстремальных характеристик объекта.
Задачей оптимальной автоматической системы управления в данном случае яв-ляется обеспечение минимального расхода горючего Q при различных нагрузках двигателя M
Рис. 38. Структурная схема автоматической системы оптимального регулирования.
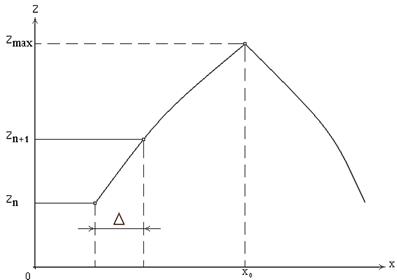
Оптимизаторы отличаются друг от друга способом поиска экстремума. Один из них называется способом последовательных шагов (рис. 39). Пусть ищется максимум экстремальной характеристики. Сначала даётся принудительное изменение величины x в какую-либо сторону на
Рис. 39. Поиск максимума методом последовательных шагов.
Итак, оптимальные системы управления отличаются от обычных тем, что в них производится автоматическая настройка требуемого значения параметра.
|
||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 69; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.72.44 (0.006 с.) |

 . Для широкого диапазона нагрузок возьмём семейство экстремальных характеристик, каждая из которых имеет свой экстремум Q
. Для широкого диапазона нагрузок возьмём семейство экстремальных характеристик, каждая из которых имеет свой экстремум Q 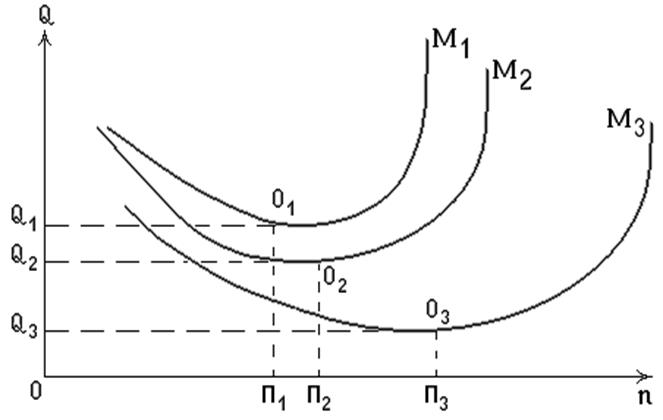
 при нагрузке M
при нагрузке M 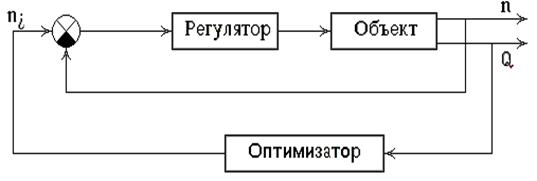
 . Если получившаяся разность z
. Если получившаяся разность z  – z
– z  > 0, то дают новое приращение x на величину
> 0, то дают новое приращение x на величину  . Существуют и другие способы поиска экстремума.
. Существуют и другие способы поиска экстремума.