
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Равновесие плоской системы сил. Уравнения равновесия и их различные формы
При равновесии главный вектор системы равен нулю (Fгл = 0).
где Fkx и Fky — проекции векторов на оси координат.
Поскольку точка приведения выбрана произвольно, ясно, что при равновесии сумма моментов сил системы относительно любой точки на плоскости должна равняться нулю:
где А и В — разные точки приведения. Условие равновесия произвольной плоской системы сил может быть сформулировано следующим образом: Для того чтобы твердое тело под действием произвольной плоской системы сил находилось в равновесии, необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил системы на любую ось относительно любой точки в плоскости действия сил равнялась нулю.
Теоретически уравнений моментов можно записать бесконечное множество, но практически доказано, что на плоскости можно составить только три независимых уравнения моментов и при этом три точки (центры моментов) не должны лежать на одной линии. Таким образом, имеем пять независимых уравнений равновесия. Практически для решения задач на плоскости достаточно трех уравнений равновесия. В каждом конкретном случае используются уравнения с одним неизвестным. Для разных случаев используются три группы уравнений равновесия. Первая форма уравнений равновесия:
Способы задания движения точки
Таким образом, уравнение движения можно представить в виде S = f (t). Положение точки можно также определить, если известны ее координаты в зависимости от времени. Тогда в случае движения на плоскости должны быть заданы два уравнения:
В случае пространственного движения добавляется и третья координата z = f з (t) Такой способ задания движения называют координатным. Вопрос 12
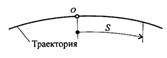
Векторная величина, характеризующая в данный момент быстроту и направление движения по траектории, называется скоростью.
Скорость — вектор, в любой момент времени направленный по касательной к траектории в сторону направления движения. Если точка за равные промежутки времени проходит равные расстояния, то движение называют равномерным. Средняя скорость на пути AS определяется как
где ΔS — пройденный путь за время Δt; Δt — промежуток времени.
Если точка за равные промежутки времени проходит неравные пути, то движение называют неравномерным. В этом случае скорость — величина переменная и зависит от времени v = f (t). При рассмотрении малых промежутков времени (Δt → 0) средняя скорость становится равной истинной скорости движения в данный момент. Поэтому скорость в данный момент определяют как производную пути по времени:
За единицу скорости принимают 1 м/с. Иногда скорость измеряют в км/ч, 1км/ч = 0,278м/с. Вопрос 13 Ускорение
Скорость точки при перемещении из точки М1 в точку М2 меняется по величине и направлению. Среднее значение ускорения за этот промежуток времени
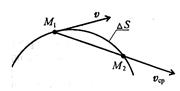
Обычно для удобства рассматривают две взаимно перпендикулярные составляющие ускорения: нормальное и касательное. Нормальное ускорение ап характеризует изменение скорости по направлению и определяется как
где г — радиус кривизны траектории в данный момент времени.
Нормальное ускорение всегда направлено перпендикулярно скорости к центру дуги. Касательное ускорение at характеризует изменение скорости по величине и всегда направлено по касательной к траектории; при ускорении его направление совпадает с направлением скорости, а при замедлении оно направлено противоположно направлению вектора скорости. Формула для определения касательного ускорения имеет вид:
Вопрос 14 Виды движения точки Равномерное движение. Э то движение с постоянной скоростью: v — const.
Уравнение (закон) движения точки при равномерном движении - уравнение прямой:
, где So — путь, пройденный до начала отсчета.
Равнопеременное движение. Э то движение с постоянным касательным ускорением: at = const.
Значение скорости при равнопеременном движении
Закон равнопеременного движения в общем виде, представляющий уравнение параболы:
So — путь, пройденный до начала отсчета; at — постоянное касательное ускорение. Вопрос 15
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 188; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.225.31.159 (0.011 с.) |
 Аналитическое определение главного вектора приводит к выводу:
Аналитическое определение главного вектора приводит к выводу:
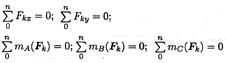 Получим основную форму уравнения равновесия:
Получим основную форму уравнения равновесия:
 Вопрос 11
Вопрос 11 Положение точки в каждый момент времени можно определить по расстоянию, пройденному вдоль траектории от некоторой неподвижной точки, рассматриваемой как начало отсчета. Такой способ задания движения называется естественным.
Положение точки в каждый момент времени можно определить по расстоянию, пройденному вдоль траектории от некоторой неподвижной точки, рассматриваемой как начало отсчета. Такой способ задания движения называется естественным.
 Скорость
Скорость


 Векторная величина, характеризующая быстроту изменения скорости по величине и направлению, называется ускорением точки.
Векторная величина, характеризующая быстроту изменения скорости по величине и направлению, называется ускорением точки.
 При рассмотрении бесконечно малого промежутка времени среднее ускорение превратится в ускорение в данный момент:
При рассмотрении бесконечно малого промежутка времени среднее ускорение превратится в ускорение в данный момент:

 Значение полного ускорения определяется как а t = d V / dt = v 1 = S ’’ .
Значение полного ускорения определяется как а t = d V / dt = v 1 = S ’’ .

 При криволинейном равномерном движении
При криволинейном равномерном движении
 Полное ускорение равно нормальному ускорению: а = ап.
Полное ускорение равно нормальному ускорению: а = ап.
 Полное ускорение равно касательному ускорению.
Полное ускорение равно касательному ускорению.


 где v 0 — начальная скорость движения;
где v 0 — начальная скорость движения;


