
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Термоэлектрические преобразователиСодержание книги
Поиск на нашем сайте
Таким образом, в месте соединения проводников возникает разность потенциалов (термо-ЭДС) Е Θ1, значение которой зависит оттемпературы Θ1 места соединения. В другом месте соединения также возникает термо-ЭДС Е Θ2, значение которой зависит оттемпературы Θ2 места соединения: Цепь, составленная из двух разнородных проводников, называется термоэлектрическим преобразователем или термопарой. Место соединения проводников, находящееся под воздействием температуры измеряемой среды, называется горячим или рабочим спаем. Место соединения проводников, находящееся под воздействием температуры окружающей среды, называется холодным или свободным спаем. Разнородные проводники А и В, составляющие термоэлектрический преобразователь, называются термоэлектродами. Для замкнутой цепи, состоящей из двух проводников, термо-ЭДС равна алгебраической сумме разностей потенциалов спаев: ЕАВ = Е Θ1 – Е Θ2. При одинаковой температуре обоих спаев термо-ЭДС ЕАВ будет равна нулю, так как Е Θ1 = Е Θ2. При разной температуре спаев термо-ЭДС ЕАВ не равна нулю. Если температуру холодного спая поддерживать постоянной, то Е Θ2 = const, и термо-ЭДС ЕАВ изменяется в функции температуры горячего спая. Для измерения термо-ЭДС электроизмерительные приборы включаются в цепь термопары, обычно в разрыв холодного спая (рис. 2.8, б). В этом случае преобразователь имеет один горячий и два холодных спая. При постоянстве и равенстве температур холодных спаев термо-ЭДС будет зависеть только от температуры горячего спая. Вообще в любой последующей цепи, из каких бы проводников она не составлялась, и при какой бы температуре ни были контакты, дополнительной ЭДС не образуется. Используемые материалы. Термоэлектроды из благородных металлов (в основном платиновой группы) применяют для измерения температур в области 300–1600 °C в окислительной и нейтральной среде. Например, платинородий – платина (платинородий – сплав 90% Pt и 10% Rh) в числе лучших по точности и воспроизводимости ЭДС. Наиболее распространены хромель-копелевые термопары типа ТХК и хромель-алюмелевые типа ТХА. Хромель: 89% Ni + 10% Cr +примеси. Копель: 56% Cu + 44%Ni. Алюмель: 94%Ni + 2% Al + 2.5%Mn + 1%Si + примеси. Термопара типа ТХК обладает наибольшей дифференциальной чувствительностью из всех промышленных термопар (около 70÷90 мкВ/°С), применяется для точных измерений температуры. Обладает высокой термоэлектрической стабильностью при нагревах до 600 °С. Технический ресурс термопар может составлять несколько десятков тысяч часов. К недостаткам ТХК можно отнести относительно высокую чувствительность к деформации. Для термометров с термоэлектродами диаметром менее 1 мм верхний предел длительного применения менее 600 °C и составляет, например, для термоэлектродов диаметром 0,2¸0,3 мм только 400 °C. Термопары типа ТХА наиболее распространены в промышленности и научных исследованиях. Они предназначены для длительного измерения температуры до 1100 °С в окислительных и инертных средах. Номинальная статическая характеристика ТХА близка к линейной, дифференциальная термоЭДС около 40 мкВ/°С во всем диапазоне измеряемых температур. Главное преимущество ТХА, по сравнению с другими термопарами из неблагородных металлов, состоит в значительно большей стойкости к окислению при высоких температурах. Технический ресурс термопар при температурах менее 850 °C ограничивается только дрейфом термоЭДС, т.к. жаростойкость хромеля и алюмеля позволяет использовать их при этих температурах десятки тысяч часов. Поправка на температуру свободных концов. Обычно температура свободных концов термопары не равна нулю. Так как термо-ЭДС пропорциональна разности температур холодного и горячего спаев, то при изменении температуры холодного спая будет меняться термо-ЭДС. Поэтому для получения истинного значения температуры горячего спая необходимо измерить температуру холодного спая и сложить этот результат с результатом измерения при помощи термопары. Термопару можно считать апериодическим звеном первого порядка, постоянная времени которого колеблется от 10 с до 7 мин. На автоматизированных судах термопары работают совместно с измерительно-информационными системами, на вход которых должны подаваться унифицированные сигналы. Выходной сигнал термопары приводится к унифицированному виду с помощью нормирующего преобразователя. Индуктивные преобразователи
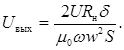
Расчет магнитных цепей изучен в ТОЭ. Примем допущения (довольно грубые): - потоками рассеяния и потерями в стали пренебрегаем; - магнитное сопротивление воздушного зазора много больше магнитного сопротивления магнитопровода; - индуктивное сопротивление обмотки много больше активного ее сопротивления и сопротивления нагрузки. При этих допущениях действующее значение выходного напряжения преобразователя
В приведенном выражении переменной величиной является δ. График зависимости Uвых(δ) представляет собой прямую, проходящую через начало координат (рис. 2.10, штриховая линия). Реальная характеристика показана сплошной линией. Отличие реальной характеристики от линейной при малых значениях δ объясняется тем, что при таких δ магнитное сопротивление магнитопровода преобразователя становится соизмеримым с магнитным сопротивлением воздушного зазора, поэтому пренебрежение величиной приводит к появлению погрешности. Отклонение реальной характеристики от линейной при больших значениях δ объясняется тем, что индуктивность существенно уменьшается, поэтому индуктивное сопротивление становится соизмеримым с активным сопротивлением, что и вызывает отклонение характеристики. Рассмотренный индуктивный преобразователь имеет следующие недостатки: а) невысокая линейность; б) на якорь постоянно действует электромагнитная сила, стремящаяся притянуть его к полюсам сердечника. Из-за указанных недостатков такие преобразователи применяются редко.
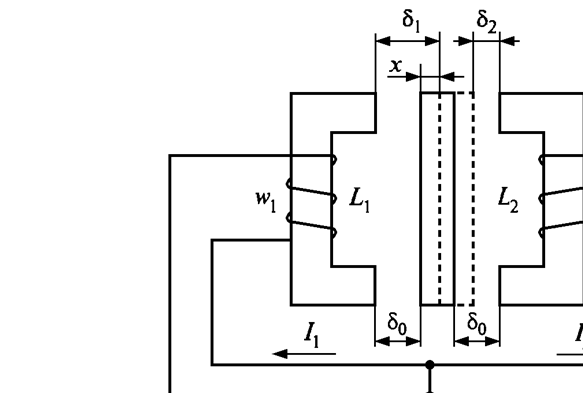
Магнитная система имеет два одинаковых сердечника I и II иобщий якорь III. Обмотки сердечников содержат одинаковое число витков. Сопротивление нагрузки включается между средней точкой вторичной обмотки трансформатора TV и средней точкой обмоток сердечников. При таком включении ток нагрузки равен разности токов верхней и нижней половин схемы: İ = İ 1 – İ 2. (2.16) При активной нагрузке Z н = R н выходное напряжение равно Ů н = R н (İ 1 – İ 2) = Ů 1 – Ů 2. (2.17) В нейтральном положении якоря (х = 0) зазоры между полюсами сердечника и якорем одинаковы: δ1 = δ2 = δ0. Индуктивности обмоток также равны: L 1 = L 2, поэтому токи I 1 и I 2 равны по модулю, а ток нагрузки I = 0. Следовательно, и выходное напряжение преобразователя равно нулю. Таким образом, при входном сигнале, равном нулю, выходной сигнал также равен нулю. Перемещение якоря вверх приведет к уменьшению верхнего воздушного зазора и увеличению нижнего: δ1 = δ0 – х; δ2 = δ0 + х, (2.18) где х – перемещение якоря. Изменение зазоров вызовет увеличение индуктивного сопротивления обмотки верхнего сердечника и уменьшение индуктивного сопротивления обмотки нижнего сердечника. При этом ток I 1 уменьшится, а ток I 2 возрастет. В нагрузке потечет результирующий ток и появится выходное напряжение. Если же якорь перемещается вниз – I 2 уменьшится, а ток I 1 возрастет, что также вызовет появление результирующего тока, фаза которого на 180° будет отличаться от фазы результирующего тока при перемещении вверх. Зависимость напряжений U 1 и U 2 от перемещения можно получить, воспользовавшись кривой на рис. 2.10. При построении кривых следует учесть, что при изменении х от хmax до – хmax δ1 изменяется от 0 до 2δ0, а δ2 изменяется в это же время от 2δ0 до 0. На рис. 2.11, б показаны кривые U 1, и U 2 и их разность U вых. Характеристика U вых = f(x) проходит через начало координат. Изменение знака U вых при изменении знака x соответствует изменению фазы выходного напряжения преобразователя на 180°. В мостовой схеме реверсивного индуктивного преобразователя (рис. 2.12) обмотки сердечников включаются в смежные плечи моста. Переменное напряжение подается в одну диагональ моста, выходное напряжение снимается с другой диагонали.
Реверсивные индуктивные преобразователи по сравнению с нереверсивными имеют следующие преимущества: 1) линейная часть выходной характеристики имеет большую протяженность;
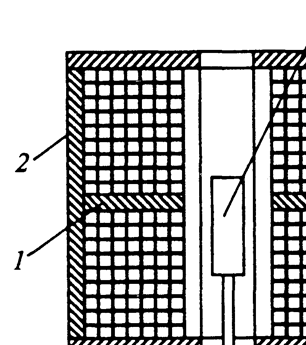
Рассмотренные реверсивные индуктивные преобразователи позволяют измерять перемещение от нескольких микрон до десятых долей миллиметра. Нижний предел обусловлен технологическими трудностями создания малых воздушных зазоров. Верхний предел объясняется значительным уменьшением чувствительности при больших воздушных зазорах из-за появления потоков рассеяния. Для измерения больших перемещений применяются цилиндрические реверсивные индуктивные преобразователи. На рис. 2.13 показан реверсивный индуктивный преобразователь, у которого рабочий диапазон измеряемых перемещений достигает нескольких миллиметров. Магнитопровод преобразователя 2 выполняется в виде цилиндрической трубки, которая вместе с двумя крышками 4 выполняет роль ярма. Якорь 3 также имеет цилиндрическую форму. Диск 1 из ферромагнитного материала предназначен для увеличения магнитной проводимости между трубкой и якорем. По обе стороны от диска устанавливаются две цилиндрические катушки 5. Как правило, преобразователь имеет две одинаковые катушки. Принцип действия преобразователя аналогичен принципу действия реверсивного индуктивного преобразователя, рассмотренного выше.
Индуктивные преобразователи нашли применение в датчиках уровня, давления, датчиках перемещения рейки топливных насосов дизеля. Общим недостатком их является гальваническая связь источника и нагрузки.
|
||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 90; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.227.140.100 (0.008 с.) |

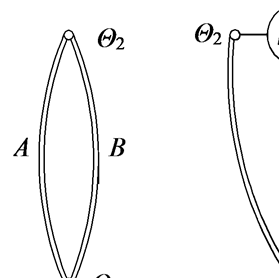 Принцип действия термоэлектрических преобразователей основан на использовании следующего термоэлектрического явления. Если составить цепь из двух разнородных проводников А и В (рис. 2.8, а) и температуру мест их соединения поддерживать разной, то между проводниками возникает термоэлектрическая ЭДС (термо-ЭДС), значение которой зависит от материала проводников и разности температур мест их соединения. Возникновение термо-ЭДС объясняется неодинаковой плотностью свободных электронов в разнородных проводниках. Вследствие этого в месте соединения проводников происходит диффузия электронов из одного проводника в другой. Проводник с большей плотностью свободных электронов приобретает положительный потенциал (благодаря диффузии некоторой части электронов в другой проводник), а проводник с меньшей плотностью – отрицательный потенциал.
Принцип действия термоэлектрических преобразователей основан на использовании следующего термоэлектрического явления. Если составить цепь из двух разнородных проводников А и В (рис. 2.8, а) и температуру мест их соединения поддерживать разной, то между проводниками возникает термоэлектрическая ЭДС (термо-ЭДС), значение которой зависит от материала проводников и разности температур мест их соединения. Возникновение термо-ЭДС объясняется неодинаковой плотностью свободных электронов в разнородных проводниках. Вследствие этого в месте соединения проводников происходит диффузия электронов из одного проводника в другой. Проводник с большей плотностью свободных электронов приобретает положительный потенциал (благодаря диффузии некоторой части электронов в другой проводник), а проводник с меньшей плотностью – отрицательный потенциал.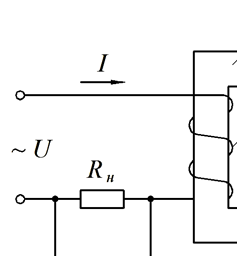 Индуктивные преобразователи служат для преобразования угловых и линейных перемещений в электрический сигнал. На рис. 2.9 показана схема простейшего индуктивного преобразователя, состоящего из магнитного сердечника 1 с обмоткой 2 и якоря 3. Между полюсами сердечника и якорем имеется воздушный зазор δ.
Индуктивные преобразователи служат для преобразования угловых и линейных перемещений в электрический сигнал. На рис. 2.9 показана схема простейшего индуктивного преобразователя, состоящего из магнитного сердечника 1 с обмоткой 2 и якоря 3. Между полюсами сердечника и якорем имеется воздушный зазор δ.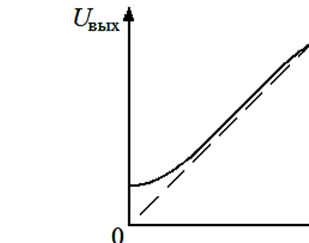
 (2.15)
(2.15)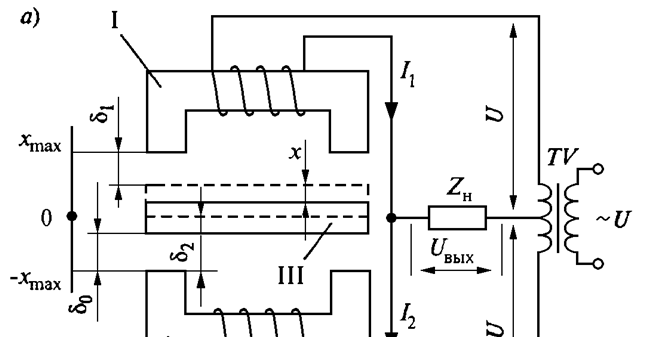
 Включение цилиндрических реверсивных индуктивных преобразователей может производиться как по дифференциальной, так и по мостовой схемам.
Включение цилиндрических реверсивных индуктивных преобразователей может производиться как по дифференциальной, так и по мостовой схемам.


