
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тензорезисторные преобразователиСодержание книги
Поиск на нашем сайте Термопреобразователи сопротивления Принцип действия термопреобразователей сопротивления (ТПС) основан на изменении электрического сопротивления проводниковых и полупроводниковых материалов при изменении их температуры. В ТПС используются материалы, обладающие большим и стабильным температурным коэффициентом сопротивления (ТКС), линейной зависимостью сопротивления от температуры, хорошей воспроизводимостью свойств. Приборы для измерения температуры, в которых в качестве чувствительных элементов используются ТПС, называются термометрами сопротивления. В промышленных термометрах сопротивления широко применяются проводниковые ТС, которые изготавливаются из чистых металлов: платины, меди, никеля и железа. Наиболее широко применяются платина и медь. Характеристики наиболее распространенных материалов для ТПС:
Для металлов зависимость сопротивления от температуры имеет нелинейный характер:
где R0 – сопротивление проводника при начальной температуре; Θ – перегрев проводника относительно начальной температуры; α, β, γ, … – коэффициенты, зависящие от свойств проводника. Наибольшее значение имеет α: это и есть ТКС. Номинальное сопротивление ТПС представляет собой нормированное изготовителем сопротивление при 0 °С, округленное до целых единиц, выбираемое из ряда: 10; 50; 100; 500; 1000 Ом. Существуют ТПС и с другими значениями номинального сопротивления, однако в настоящее время наибольшее распространение получили ТС с номинальным сопротивлением 100 Ом при 0 °C (Pt100). Вместе с тем имеет место тенденция к использованию ТПС с величиной номинального сопротивления до 1 кОм и даже 10 кОм. Измерительные системы, в которых используются ТПС с высоким значением номинального сопротивления, обладают дополнительными преимуществами, важным из которых является снижение влияния длины соединительных проводов ТПС на точность измерений. Конструктивное исполнение. Внешний вид типичного термометра сопротивления показан на рис. 2.5. Самая распространенная конструкция – так называемая «свободная от напряжения спираль» (Strain-free). Эта конструкция выпускается многими российскими и зарубежными предприятиями и считается самой надежной. чувствительный элемент представляет собой платиновую спираль, которая укладываются в каналы трубки из оксида алюминия и засыпаются мелкодисперсным порошком из оксида алюминия высокой чистоты. Таким образом, обеспечивается изоляция витков спирали друг от друга, амортизация спирали при термическом расширении и вибропрочность.
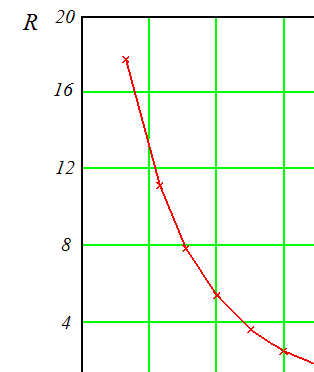
Рис. 2.5. Термометр сопротивления Применяются также пленочные чувствительные элементы. Они изготавливаются нанесением тонкого слоя платины на керамическую подложку. Слой платины сверху покрывается эпоксидным или стеклянным изоляционным слоем. Технология изготовления освоена многими зарубежными фирмами, в настоящее время пленочный платиновый ЧЭ – это самый дешевый и самый широко продаваемый сенсор. Большим преимуществом является малый размер и масса ЧЭ, это позволяет устанавливать такие ЧЭ в миниатюрные корпуса и получать быструю скорость реагирования на изменение температуры объекта. Благодаря малым размерам, пленочные ЧЭ могут изготавливаться с повышенным номинальным сопротивлением. Уже разработаны и производятся ЧЭ с сопротивлением 1000 Ом. Это позволяет значительно снизить влияние сопротивления выводов при подключении по 2-х проводной схеме. По стабильности пленочные ЧЭ все еще уступают проволочным, но их технология постоянно совершенствуется, и в последнее время отчетливо наблюдается прогресс в повышении стабильности сопротивления ЧЭ и расширении температурного диапазона. Из-за тепловой инерции температура чувствительного элемента отличается от температуры контролируемой среды, которая меняется во времени. Тепловая инерция зависит от условий теплообмена между средой и чувствительным элементом. Термометр сопротивления можно считать апериодическим звеном первого порядка, постоянная времени которого зависит от удельной теплоемкости термометра, его массы и коэффициента теплопередачи. Постоянная времени термометра сопротивления зависит от условий охлаждения и будет различной для одного и того же преобразователя, находящегося в воздухе и в жидкости. В зависимости от конструкции постоянная времени термометров сопротивления колеблется от 10 с до 7 мин. Перспективными являются ТПС, изготовленные из полупроводниковых материалов с большим отрицательным температурным коэффициентом. Их называют термисторами или терморезисторами. Термисторы с положительным ТКС называются позисторами. Термисторы изготавливаются на основе полупроводниковых оксидов металлов, спрессованных для получения заданной формы. Механическая прочность и защита от воздействий окружающей среды обеспечивается с помощью металлического корпуса или защитного изолирующего слоя. Термисторы имеют очень высокую температурную чувствительность по сравнению с другими типами датчиков температуры. Типовое значение ТКС для термисторов составляет – 5% на градус, в то время как для платинового ТПС он составляет 0,4% на градус. Типовой диапазон температур термисторов достаточно узок (–60...+150 С), для некоторых образцов он расширен до (–60...+300 С). Важным преимуществом термисторов является их большое сопротивление, что устраняет проблему, связанную с падением напряжения на подводящих проводах, как при использовании платиновых ТПС, или проблему, связанную с необходимостью большого усиления сигнала (до 2000), как для термопар. Термисторы имеют существенно нелинейную вольт-амперную характеристику. Пример зависимости R (T) показан на рис. 2.6.
R (T) = A exp(b / T), (1.13) где A, b – постоянные, зависящие от свойств материала и геометрических размеров. Однако, сложный состав и неидеальное распределение зарядов в полупроводнике искажает эту теоретическую зависимость и требует эмпирического подхода. Поэтому для термисторов используется аппроксимационная зависимость
где T – температура в К; R – сопротивление в Ом; a 0, a 1, a 2 – константы термистора, определяемые при градуировке в трех температурных точках, отстоящих друг от друга не менее, чем на 10 °С. Эти константы зависят от физических свойств полупроводника, размеров и формы термистора. Типичный термистор с номинальным сопротивлением 10 кОм имеет коэффициенты в диапазоне 0–100 °С, близкие к следующим значениям: a 0 = 1,03 10-3; a 1 = 2,93 10-4; a 2 = 1,57 10-7. Недостатками термисторов являются нелинейность зависимости их сопротивлений от температуры и значительное отклонение от образца к образцу как номинального значения сопротивления, нормируемого обычно при 20 °С (более ±30%), так и характера зависимости сопротивления от температуры.
На рис. 2.7 показана температурная зависимость позистора. При низких температурах позистор имеет небольшой отрицательный ТКС (примерно до 60–80 °С). Дальнейшее повышение температуры вызывает резкий рост сопротивления, достигающего максимального значения при 190–200 °С. Именно этот участок характеристики используется на практике. С ростом температуры свыше 190–200 °С сопротивление снова уменьшается. На судах позисторы используют для защиты асинхронных электродвигателей от перегрузки.
Индуктивные преобразователи
Расчет магнитных цепей изучен в ТОЭ. Примем допущения (довольно грубые): - потоками рассеяния и потерями в стали пренебрегаем; - магнитное сопротивление воздушного зазора много больше магнитного сопротивления магнитопровода; - индуктивное сопротивление обмотки много больше активного ее сопротивления и сопротивления нагрузки. При этих допущениях действующее значение выходного напряжения преобразователя
В приведенном выражении переменной величиной является δ. График зависимости Uвых(δ) представляет собой прямую, проходящую через начало координат (рис. 2.10, штриховая линия). Реальная характеристика показана сплошной линией. Отличие реальной характеристики от линейной при малых значениях δ объясняется тем, что при таких δ магнитное сопротивление магнитопровода преобразователя становится соизмеримым с магнитным сопротивлением воздушного зазора, поэтому пренебрежение величиной приводит к появлению погрешности. Отклонение реальной характеристики от линейной при больших значениях δ объясняется тем, что индуктивность существенно уменьшается, поэтому индуктивное сопротивление становится соизмеримым с активным сопротивлением, что и вызывает отклонение характеристики. Рассмотренный индуктивный преобразователь имеет следующие недостатки: а) невысокая линейность; б) на якорь постоянно действует электромагнитная сила, стремящаяся притянуть его к полюсам сердечника. Из-за указанных недостатков такие преобразователи применяются редко.
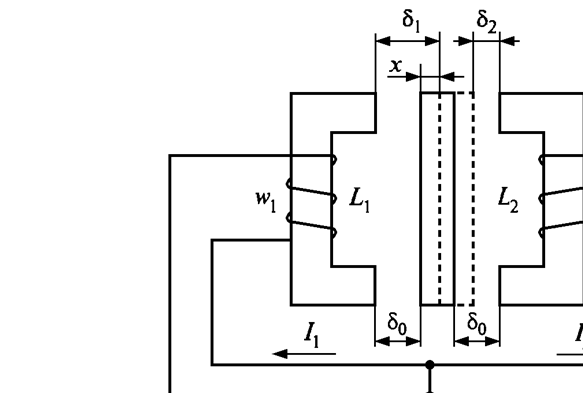
Магнитная система имеет два одинаковых сердечника I и II иобщий якорь III. Обмотки сердечников содержат одинаковое число витков. Сопротивление нагрузки включается между средней точкой вторичной обмотки трансформатора TV и средней точкой обмоток сердечников. При таком включении ток нагрузки равен разности токов верхней и нижней половин схемы: İ = İ 1 – İ 2. (2.16) При активной нагрузке Z н = R н выходное напряжение равно Ů н = R н (İ 1 – İ 2) = Ů 1 – Ů 2. (2.17) В нейтральном положении якоря (х = 0) зазоры между полюсами сердечника и якорем одинаковы: δ1 = δ2 = δ0. Индуктивности обмоток также равны: L 1 = L 2, поэтому токи I 1 и I 2 равны по модулю, а ток нагрузки I = 0. Следовательно, и выходное напряжение преобразователя равно нулю. Таким образом, при входном сигнале, равном нулю, выходной сигнал также равен нулю. Перемещение якоря вверх приведет к уменьшению верхнего воздушного зазора и увеличению нижнего: δ1 = δ0 – х; δ2 = δ0 + х, (2.18) где х – перемещение якоря. Изменение зазоров вызовет увеличение индуктивного сопротивления обмотки верхнего сердечника и уменьшение индуктивного сопротивления обмотки нижнего сердечника. При этом ток I 1 уменьшится, а ток I 2 возрастет. В нагрузке потечет результирующий ток и появится выходное напряжение. Если же якорь перемещается вниз – I 2 уменьшится, а ток I 1 возрастет, что также вызовет появление результирующего тока, фаза которого на 180° будет отличаться от фазы результирующего тока при перемещении вверх. Зависимость напряжений U 1 и U 2 от перемещения можно получить, воспользовавшись кривой на рис. 2.10. При построении кривых следует учесть, что при изменении х от хmax до – хmax δ1 изменяется от 0 до 2δ0, а δ2 изменяется в это же время от 2δ0 до 0. На рис. 2.11, б показаны кривые U 1, и U 2 и их разность U вых. Характеристика U вых = f(x) проходит через начало координат. Изменение знака U вых при изменении знака x соответствует изменению фазы выходного напряжения преобразователя на 180°. В мостовой схеме реверсивного индуктивного преобразователя (рис. 2.12) обмотки сердечников включаются в смежные плечи моста. Переменное напряжение подается в одну диагональ моста, выходное напряжение снимается с другой диагонали.
Реверсивные индуктивные преобразователи по сравнению с нереверсивными имеют следующие преимущества: 1) линейная часть выходной характеристики имеет большую протяженность;
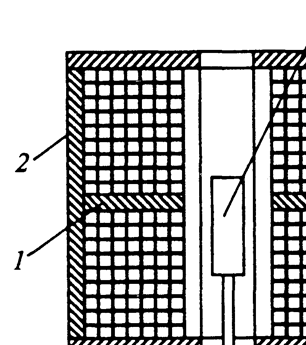
Рассмотренные реверсивные индуктивные преобразователи позволяют измерять перемещение от нескольких микрон до десятых долей миллиметра. Нижний предел обусловлен технологическими трудностями создания малых воздушных зазоров. Верхний предел объясняется значительным уменьшением чувствительности при больших воздушных зазорах из-за появления потоков рассеяния. Для измерения больших перемещений применяются цилиндрические реверсивные индуктивные преобразователи. На рис. 2.13 показан реверсивный индуктивный преобразователь, у которого рабочий диапазон измеряемых перемещений достигает нескольких миллиметров. Магнитопровод преобразователя 2 выполняется в виде цилиндрической трубки, которая вместе с двумя крышками 4 выполняет роль ярма. Якорь 3 также имеет цилиндрическую форму. Диск 1 из ферромагнитного материала предназначен для увеличения магнитной проводимости между трубкой и якорем. По обе стороны от диска устанавливаются две цилиндрические катушки 5. Как правило, преобразователь имеет две одинаковые катушки. Принцип действия преобразователя аналогичен принципу действия реверсивного индуктивного преобразователя, рассмотренного выше.
Индуктивные преобразователи нашли применение в датчиках уровня, давления, датчиках перемещения рейки топливных насосов дизеля. Общим недостатком их является гальваническая связь источника и нагрузки.
Емкостные преобразователи Принцип действия емкостных преобразователей основан на зависимости емкости конденсатора от его геометрических размеров, формы, расстояния между его обкладками и от диэлектрической проницаемости среды. В емкостных преобразователях обычно используются плоскопараллельные или цилиндрические конденсаторы. Питание осуществляется от источника переменного тока. Емкость плоскопараллельного конденсатора определяется выражением
где ε 0– электрическая постоянная, равная 8,85•10–12 Ф/м; ε r – относительная диэлектрическая проницаемость среды; S – площадь обкладок; d – расстояние между обкладками. Каждая из переменных в правой части может являться входной величиной преобразователя.
где r 1 и r 2 – наружный и внутренний радиусы обкладок; α0 – начальный угол перекрытия. Нетрудно показать геометрическим расчетом, что емкость изменяется по линейному закону в зависимости от угла α. Емкостные датчики применяются для измерения сравнительно больших угловых перемещений. Соответствующим выбором формы подвижной 1 и неподвижной 2 обкладок можно получить заданную функциональную зависимость между изменением емкости и угловым перемещением. С изменением расстояния d между обкладками (рис.) емкость конденсатора изменяется по гиперболическому закону. Емкостные преобразователи с переменным расстоянием между обкладками применяются для измерения малых линейных перемещений (до 1 мм). Емкостные преобразователи, емкость которых изменяется в зависимости от диэлектрической проницаемости среды, используются на судах как датчики уровня жидкости. Их емкость обычно составляет 10–200 пФ.
Особенностью датчиков уровня, использующих изменение ε r, является зависимость коэффициента преобразования от состава вещества. В таблице приведены значения ε r, для некоторых широко применяемых жидкостей.
На низких частотах (например, 50 Гц) емкостное сопротивление преобразователя достигает нескольких мегаом и становится соизмеримым с сопротивлением изоляции. [Показать простой метод быстрой прикидки порядка цифр: на 50 Гц 1 мкФ дает 3,18 кОм]. Для уменьшения сопротивления емкостные преобразователи питают от высокочастотного источника переменного тока (от единиц килогерц до десятков мегагерц). В состав датчика должен входить преобразователь C → U. В простейшем случае это делитель переменного напряжения и электронный усилитель. Емкость кабельной линии (~ 100 пФ/м) вносит погрешность, поэтому электронный преобразователь C → U располагают как можно ближе к чувствительному элементу и подключают экранированным кабелем для уменьшения влияния помех. Колебания температуры и влажности окружающей среды также оказывают вредное влияние на работу емкостного преобразователя, приводя к изменениям d и ε r. Для уменьшения температурной погрешности обкладки преобразователя выполняют из сплавов с малым температурным коэффициентом линейного расширения. Емкостные преобразователи имеют малую массу и габариты, обладают высокой чувствительностью. К недостаткам емкостных преобразователей следует отнести необходимость усиления выходного сигнала и защиты от влияния паразитных емкостей, необходимость высокочастотного источника питания. Емкостные преобразователи практически безынерционны. Тахогенераторы Общие сведения. Тахогенераторами называются электрические машины, служащие для преобразования механического перемещения вала в электрический сигнал – выходное напряжение. Закон преобразования механической величины в электрическую определяется статической характеристикой тахогенератора. Уравнение статической характеристики идеального тахогенератора имеет следующий вид:
где ω – угловая скорость вала; α – угол поворота вала. По роду тока тахогенераторы подразделяются на тахогенераторы постоянного и переменного тока. К тахогенераторам предъявляются следующие основные требования: 1) линейность выходной характеристики; 2) большая крутизна выходной характеристики; 3) малая амплитудная погрешность; 4) малая фазовая погрешность (для тахогенераторов переменного тока); 5) минимальная пульсация выходного напряжения (для тахогенераторов постоянного тока); 6) малый момент инерции ротора и малая электромагнитная постоянная времени; 7) стабильность выходной характеристики; 8) малые масса и габариты.
Тахогенераторы постоянного тока (рис. 2.20) представляют собой генераторы постоянного тока небольшой мощности с постоянными магнитами на статоре или с электромагнитным возбуждением от независимого источника постоянного тока. Наиболее распространены тахогенераторы с номинальной частотой вращения n = 1500 ÷ 3000 об/мин. При постоянном магнитном потоке возбуждения Ф уравнение якорной цепи имеет вид:
где U вых – выходное напряжение тахогенератора; E = с е Ф ω – ЭДС тахогенератора; I я = U вых/ R н – ток якоря; R я.ц – сопротивление якорной цепи, равное сумме сопротивлений якоря R я и перехода щетки – коллектор. Таким образом,
откуда
Уравнение получено без учета влияния реакции якоря и величины падения напряжения на переходе щетки – коллектор. Размагничивающее действие реакции якоря проявляется при возрастании частоты вращения n, так как при этом повышается напряжение U, увеличивается ток I я тахогенератора, а, следовательно, и МДС якоря. Поэтому при повышенных частотах вращения выходное напряжение U возрастает медленнее, чем увеличивается частота вращения. Статическая характеристика становится нелинейной. Для графитовых щеток постоянным следует считать не сопротивление перехода щетки – коллектор, а падение напряжения U щ. Это обусловлено зависимостью сопротивления графита, из которого изготавливают щетки, от плотности тока в нем. Уравнение (2.28) принимает вид:
При этом в области малых частот вращения тахогенератор становится нечувствительным к изменению ω – появляется зона нечувствительности ω з.н. Вид статической характеристики с учетом реакции якоря и нелинейности щеточного сопротивления – кривая 4 на рис. 2.21 (утрировано). Для улучшения линейности статической характеристики целесообразно по возможности увеличивать сопротивление нагрузки, так как при малых токах уменьшается реакция якоря. Хорошую линейность дают тахогенераторы с полым или дисковым якорем, так как у них снижается влияние реакции якоря. Для уменьшения зоны нечувствительности в тахогенераторах устанавливают медно-графитовые или серебряно-графитовые щетки. В тахогенераторах с обмоткой возбуждения изменение температуры окружающей среды приводит к изменению сопротивления обмотки возбуждения и, следовательно, тока возбуждения. Для уменьшения температурной погрешности магнитную систему тахогенератора делают насыщенной и рабочую точку выбирают за коленом кривой намагничивания. В этом случае изменение тока возбуждения почти не влияет на значение магнитного потока тахогенератора. Определим характер динамического звена. В переходном режиме уравнение для цепи якоря тахогенератора (без учета реакции якоря и падения напряжения на переходе щетки – коллектор) имеет вид
Подставим сюда выражения для е и i я. Введем обозначения:
С учетом этих обозначений уравнение динамики принимает вид:
Отсюда видно, что если входной величиной является угловая скорость якоря, то тахогенератор представляет собой апериодическое звено первого порядка с передаточной функцией
если же входной величиной является угол поворота, то тахогенератор представляет собой реальное дифференцирующее звено:
Основные преимущества ТГ постоянного тока заключаются в отсутствии фазовых погрешностей и высокой чувствительности. Крутизна выходной характеристики современных ТГ постоянного тока 3–100 мВ/(об/мин) (меньшие значения относятся к тахогенераторам с постоянными магнитами). В зависимости от класса точности тахогенератора скоростная амплитудная погрешность при номинальной частоте вращения составляет ±(0,5–3)%. К недостаткам тахогенератора относятся сложность конструкции, высокая стоимость, низкая надежность, нестабильность выходной характеристики из-за наличия скользящего контакта; пульсации выходного напряжения и радиопомехи, возникающие в результате коммутации тока. Как видим, все недостатки ТГ постоянного тока связаны с наличием щеточного контакта. Асинхронный тахогенератор. Имеет полый немагнитный ротор и две обмотки на статоре, сдвинутые в пространстве на 90°. Такую же конструкцию имеет двухфазного асинхронного исполнительного двигателя с полым ротором. Одна из обмоток В (возбуждения) постоянно включена в сеть (рис. 2.22), другая обмотка Г (генераторная) присоединена к нагрузке Zн, т. е. является выходной. Полый ротор выполняется из высокоомных материалов (константана, манганина и др.), сопротивление которых мало изменяется под влиянием температуры. Обмотка возбуждения создает пульсирующий магнитный поток, направленный по продольной оси машины. При неподвижном роторе этот магнитный поток будет наводить трансформаторную ЭДС Е тв полом роторе как во вторичной обмотке трансформатора. Полый ротор можно считать состоящим из элементарных проводников, замкнутых накоротко на торцах. Контуры токов, обусловленных трансформаторной ЭДС, располагаются в плоскостях, перпендикулярных продольной При вращении ротора (ω ≠ 0) ввиду его симметрии процесс наведения трансформаторной ЭДС не изменится, и магнитный поток Фв будет по-прежнему существовать. Стало быть, проводники ротора вращаются в поле Фв, и в них наводится ЭДС вращения (на рис. 2.22 условно показана с внешней стороны ротора). Величина ЭДС вращения Е вр = k 1ωФв, (2.36) где k 1 – коэффициент, зависящий от конструктивных параметров тахогенератора. Под действием ЭДС вращения по ротору протекает ток I вр, контуры которого при большом активном сопротивлении ротора располагаются в плоскостях, параллельных продольной оси. Эти токи создают магнитный поток Фвр, направленный по поперечной оси, т.е. по оси генераторной обмотки. Так как ток I вр пропорциональны ЭДС Е вр,то и магнитный поток Фвр пропорционален частоте вращения ротора ω: Фвр = k 2 ω. (2.37) Частота пульсации потока Фвр совпадает с частотой напряжения обмотки возбуждения ωв. Магнитный поток Фвр наводит в генераторной обмотке выходную ЭДС Е вых, действующее значение которой определяется уравнением Е вых = 4,44 fw г.эфФвр.m, (2.38) где w г.эф – эффективное число витков генераторной обмотки; Фвр.m – амплитудное значение потока по поперечной оси. Так как Фвр пропорционально ω, то и Е вых пропорционально ω. Частота выходной ЭДС равна частоте напряжения возбуждения и не зависит от частоты вращения ротора. Приведенные рассуждения справедливы при независимости потока Фв от частоты вращения ротора. В действительности магнитный поток Фв с ростом частоты вращения уменьшается. Это объясняется размагничивающим действием токов ротора. Если замкнуть обмотку Г на нагрузочное сопротивление Zн, то по ней потечет ток I г. Поток Фвр будет создаваться геометрической суммой МДС ротора и обмотки статора Г, что скажется на амплитуде ЭДС Е вых. Кроме того, само выходное напряжение Uвых будет меньше чем Е вых так как представляет собой геометрическую разность ЭДС Е вых и падения напряжения на собственном сопротивлении обмотки Zг: Úвых = Éг – ÍгZг. (2.39) Статические характеристики асинхронного ТГ приведены на рис. 2.23. Частота вращения ротора представлена в относительных единицах: ν = ω/ωв. Типичные параметры АТГ: - полная погрешность при максимальной рабочей скорости 0,1–2,5%; - крутизна выходной характеристики 1–10 мВ/(об/мин); - величина остаточной ЭДС 25–100 мВ.
Уравнение динамики без учета нагрузки имеет вид:
Если за входную величину принята частота вращения ротора, тахогенератор представляет собой безынерционное звено с передаточной функцией W (p) = k. Если же за входную величину принят угол поворота ротора, то тахогенератор представляет собой идеальное дифференцирующее звено с передаточной функцией W (p) = k р. Асинхронный тахогенератор используется, например, в авторулевом в качестве дифференцирующего звена, входной величиной которого является угол отклонения судна от заданного курса.
Тензорезисторные преобразователи Принцип действия тензорезистора основан на явлении тензоэффекта, заключающегося в изменении активного сопротивления проводниковых и полупроводниковых материалов при их механической деформации. В судовых системах контроля в основном применяются проводниковые тензорезисторы. Под воздействием внешней силы происходит деформация проводника как в направлении действия силы, так и в перпендикулярном направлении. Деформация в направлении действия силы в области упругих деформаций происходит в соответствии с законом Гука ε l = Δ l / l = σ/Е, (2.7) где ε l – относительная продольная деформация; l – длина проводника; Δ l – изменение длины в результате деформации; σ – механическое напряжение в проводнике; Е – модуль упругости (механическая х-ка материала). Относительная поперечная деформация проводника прямо пропорциональна относительной продольной деформации, но имеет противоположный знак (так как если тело растягивают, поперечное сечение сжимается): ε l = – μ ε п (2.8) где μ – коэффициент Пуассона. Активное сопротивление проводника при неизменной его температуре определяется из выражения R = ρl / S. Изменение сопротивления проводника под воздействием внешней силы обусловлено изменением всех трех переменных:
Относительное изменение сопротивления
Тензоэффект различных материалов характеризуется коэффициентом тензочувствительности, который равен
Для металлов и ряда сплавов (константан, нихром) k т близок к 2. Для увеличения чувствительности тензорезисторов выбирают материалы с высоким коэффициентом тензочувствительности, большим удельным сопротивлением и малым поперечным сечением. Наибольшее применение в тензорезисторах нашел константан. Он имеет незначительный температурный коэффициент сопротивления, что уменьшает погрешность, вызванную колебаниями температуры. В тензорезисторах, изготовленных из константана, в широком диапазоне сохраняется линейная зависимость между относительной деформацией и изменением сопротивления. Для работы при повышенных температурах рекомендуется изготовлять тензорезисторы из нихрома.
|
||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 131; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.016 с.) |

 (2.12)
(2.12)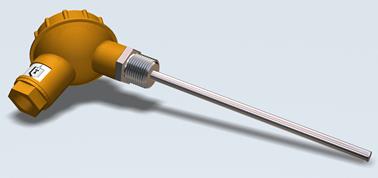
 Вообще сопротивление идеальных полупроводников (количество дырок и носителей заряда одинаково) в зависимости от температуры может быть представлено следующей формулой:
Вообще сопротивление идеальных полупроводников (количество дырок и носителей заряда одинаково) в зависимости от температуры может быть представлено следующей формулой: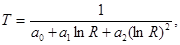 (2.14)
(2.14)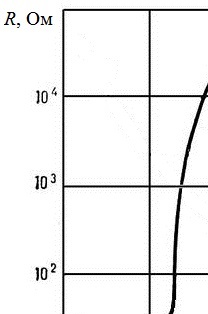 Широкое применение на судах нашли позисторы. Одним из основных отличий от термисторов являются знак и значение температурного сопротивления. В отличие от терм и ст ор ов температурная зависимость сопротивления позистора имеет сложный характер.
Широкое применение на судах нашли позисторы. Одним из основных отличий от термисторов являются знак и значение температурного сопротивления. В отличие от терм и ст ор ов температурная зависимость сопротивления позистора имеет сложный характер.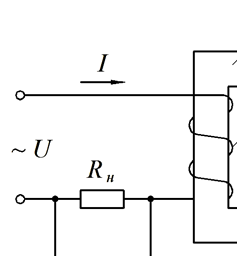 Индуктивные преобразователи служат для преобразования угловых и линейных перемещений в электрический сигнал. На рис. 2.9 показана схема простейшего индуктивного преобразователя, состоящего из магнитного сердечника 1 с обмоткой 2 и якоря 3. Между полюсами сердечника и якорем имеется воздушный зазор δ.
Индуктивные преобразователи служат для преобразования угловых и линейных перемещений в электрический сигнал. На рис. 2.9 показана схема простейшего индуктивного преобразователя, состоящего из магнитного сердечника 1 с обмоткой 2 и якоря 3. Между полюсами сердечника и якорем имеется воздушный зазор δ.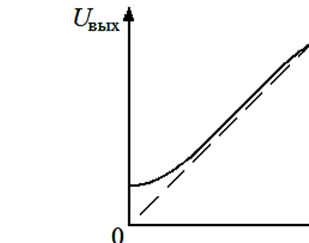
 (2.15)
(2.15)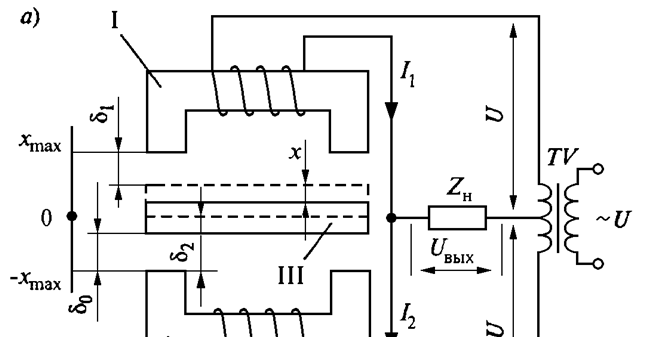
 Включение цилиндрических реверсивных индуктивных преобразователей может производиться как по дифференциальной, так и по мостовой схемам.
Включение цилиндрических реверсивных индуктивных преобразователей может производиться как по дифференциальной, так и по мостовой схемам. (2.24)
(2.24)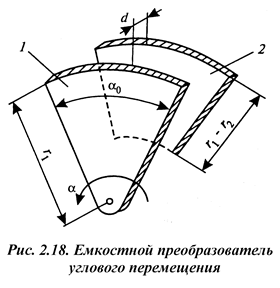 При изменении площади взаимного перекрытия пластин емкость изменяется по линейному закону. Емкостные преобразователи с переменной площадью перекрытия используются как датчики угловых перемещений (рис. 2.18). В этом случае емкость преобразователя равна
При изменении площади взаимного перекрытия пластин емкость изменяется по линейному закону. Емкостные преобразователи с переменной площадью перекрытия используются как датчики угловых перемещений (рис. 2.18). В этом случае емкость преобразователя равна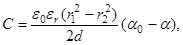 (2.25)
(2.25)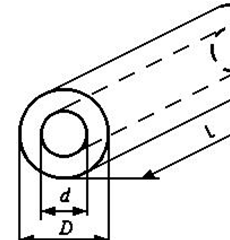 Емкость цилиндрического преобразователя (рис. 2.19)
Емкость цилиндрического преобразователя (рис. 2.19) (2.26)
(2.26) (2.27)
(2.27)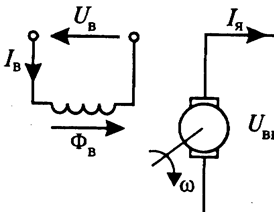 В судовых системах контроля и регулирования тахогенераторы применяются для измерения частоты вращения гребных валов, главных и вспомогательных силовых двигателей, а также для осуществления обратной связи по частоте вращения и для введения сигнала по производной от угла поворота в автоматических системах регулирования.
В судовых системах контроля и регулирования тахогенераторы применяются для измерения частоты вращения гребных валов, главных и вспомогательных силовых двигателей, а также для осуществления обратной связи по частоте вращения и для введения сигнала по производной от угла поворота в автоматических системах регулирования. (2.28)
(2.28) (2.29)
(2.29) (2.30)
(2.30) Видно, что выходное напряжение изменяется по линейному закону в функции частоты вращения ω. Наклон выходной характеристики зависит от сопротивления нагрузки (рис. 2.21, кривая 1 – х.х., 2 и 3 – с нагрузкой). Уменьшение сопротивления нагрузки приводит к уменьшению крутизны выходной характеристики.
Видно, что выходное напряжение изменяется по линейному закону в функции частоты вращения ω. Наклон выходной характеристики зависит от сопротивления нагрузки (рис. 2.21, кривая 1 – х.х., 2 и 3 – с нагрузкой). Уменьшение сопротивления нагрузки приводит к уменьшению крутизны выходной характеристики. (2.31)
(2.31) (2.32)
(2.32) – электромагнитная постоянная времени цепи якоря;
– электромагнитная постоянная времени цепи якоря; – статический коэффициент передачи тахогенератора.
– статический коэффициент передачи тахогенератора. (2.33)
(2.33) (2.34)
(2.34) (2.35)
(2.35)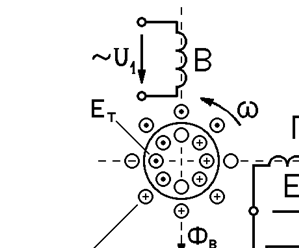 оси машины (на рис. 2.22 условно показаны внутри ротора). Эти токи создают магнитный поток, направленный, согласно правилу Ленца, навстречу магнитному потоку обмотки возбуждения. Теоретически в результате взаимодействия магнитных потоков при неподвижном роторе (ω = 0) в тахогенераторе создается магнитный поток Фв, направленный по продольной оси, поэтому в генераторной обмотке, расположенной по поперечной оси, ЭДС наводиться не будет (U вых = 0). На самом деле из-за несимметрии магнитной цепи, несимметрии полого ротора, а также неточности сдвига обмоток в пространстве на выходе тахогенератора имеется небольшое напряжение, называемое остаточным.
оси машины (на рис. 2.22 условно показаны внутри ротора). Эти токи создают магнитный поток, направленный, согласно правилу Ленца, навстречу магнитному потоку обмотки возбуждения. Теоретически в результате взаимодействия магнитных потоков при неподвижном роторе (ω = 0) в тахогенераторе создается магнитный поток Фв, направленный по продольной оси, поэтому в генераторной обмотке, расположенной по поперечной оси, ЭДС наводиться не будет (U вых = 0). На самом деле из-за несимметрии магнитной цепи, несимметрии полого ротора, а также неточности сдвига обмоток в пространстве на выходе тахогенератора имеется небольшое напряжение, называемое остаточным.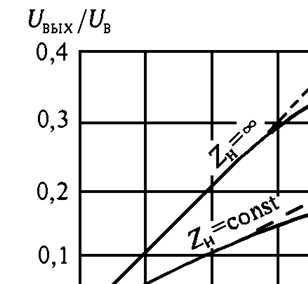 Для уменьшения скоростных погрешностей выбирают тахогенераторы с такой синхронной частотой вращения, при которой значение относительной частоты вращения ротора не превышает 0,3, так как выходная характеристика на участке ν = 0 – 0,3 практически линейна.
Для уменьшения скоростных погрешностей выбирают тахогенераторы с такой синхронной частотой вращения, при которой значение относительной частоты вращения ротора не превышает 0,3, так как выходная характеристика на участке ν = 0 – 0,3 практически линейна. (2.40)
(2.40) (2.9)
(2.9) (2.10)
(2.10) (2.11)
(2.11)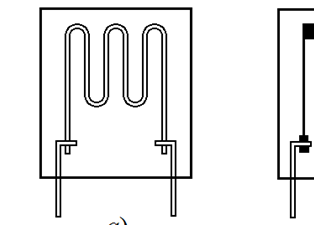 Проводниковые тензорезисторы разделяются на проволочные и фольговые. Обычно
Проводниковые тензорезисторы разделяются на проволочные и фольговые. Обычно 


