Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Оценка точности вычисленных координат ⇐ ПредыдущаяСтр 4 из 4
Средняя квадратическая ошибка М положения пункта Р вычисляется по формуле:
Средние квадратические ошибки
где С учетом (3.30) формула (3.29) примет вид:
Средние квадратические ошибки абсциссы mx и ординаты my вычисляют в метрах, для чего формулы (3.29) преобразовывают: Веса Px и Py уравненных координат пункта P вычисляются по формулам: Веса Px и Py имеют размерность В заключение вычисляют среднюю квадратическую ошибку M местоположения пункта P по формуле (3.31). Значение mβ округляют до 0,1″, mx, my, M – до 0,001 м. Выбор вариантов к заданию 3 Значения измеренных углов βi вычисляются по формуле
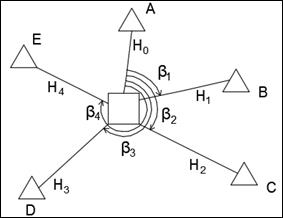
где Н0 – начальное направление; Нi – направление с индексом i (i = 1,2,3,4). Значение направлений Н0, Н1, Н2, Н3 и Н4 с определяемого пункта Р на исходные А, В, С, Д и Е (рисунок 3.3) и координат исходных пунктов в метрах, соответствующих этим направлениям, выбирают из таблицы 3.1. по индивидуальному шифру студента и году выполнения задания.
Рисунок 3.3. Координаты и направление на пункт А выбираются исходя из года выполнения задания по таблице 3.1. Координаты пунктов и направления пунктов В, С, Д и Е выбираются по таблице 3.2. Координаты и направление пункта В выбираются как сумма чисел дня рождения учащегося. Координаты и направление пункта С выбирается как первая цифра шифра обучающегося без учёта сотен. Координаты и направление пункта Д выбирается как вторая цифра шифра обучающегося без учёта сотен. Координаты и направление пункта Д выбирается как суммированием всех 3х цифр шифра и выбором последней цифры этой суммы. Например, 2019 год. Последний високосный год от указанной даты был в 2016 году, следовательно, для 2019 выбирается колонка N+3 для определения координат пункта А. Затем, исходя из дня рождения студента (21 число) и шифра студента 63п-79. Получится: пункту В соответствует цифра 3, пункту С – цифра 7, пункту Д – цифра 9, пункту Е – цифра 6 (0+7+9 = 16).
Таблица 3.1 – Таблица для определения исходных координат и направления на пункт А
Таблица 3.2 – Таблица для определения исходных координат и направлений на пункты В, С, Д и Е.
Все вычисления необходимо производить в таблицах, приведённых далее:
Примечание: за окончательное принимается значение α2, полученное по формуле (8), которое может отличаться от полученного по формуле (2) на 180°. В этом случае значения α1 и α3 также должны быть изменены на 180°. Определяемый пункт P: ___________________ Данные пункты: T1___________________ T2___________________ T3___________________
Вычисление приближенных дирекционных углов и расстояний:
Вычисление свободных членов уравнения поправок:
Вычисления коэффициентов нормальных уравнений:
Составление и решение нормальных уравнений:
Вычисление окончательных координат пункта:
Вычисление окончательных дирекционных углов и расстояний:
Вычисление поправок в измеренные углы и контроль решения задачи:
КОНТРОЛЬНЫЕ ВОПРОСЫ 1) Каково назначение геодезических сетей? 2) Какие принципы закладываются при развитии геодезических сетей?
3) В чем суть метода полигонометрии? 4) Как классифицируется полигонометрия по точности? 5) Какие основные требования предъявляются к полигонометрии 4 класса 1 и 2 разрядов? 6) Для чего проводятся привязочные работы в полигонометрии? 7) Что такое угловая и координатная привязка? 8) Когда привязка осуществляется засечками? 9) В чем отличие однократной от многократной засечки? 10) Каковы основные этапы решения прямой и обратной многократных засечек? 11) В чем заключается оценка точности положения пункта» определяемого засечками, и как она, производится? 12) Каковы основные задачи предварительных вычислений? 13) В чем состоит контроль полевых журналов? 14) Для чего определяют: степень изогнутости хода и какие критерии’ для этого используют? 15) Что такое продольная-и поперечная невязки вытянутого хода и для чего они используются? 16) В чем заключается предварительная оценка точности измерения углов и линий? 17) Как оценивается точность положения пункта? 18) В чем заключается задача уравнивания полигонометрического хода? 19) Что такое строгий и приближенные способы уравнивания? 20) Как проводится оценка точности измеренных величин и вычисленных координат при уравнивании полигонометрического хода? 21) Какие способы применяют для уравнивания полигонометрических сетей? ЛИТЕРАТУРА 1. Горяинов И.В. Обратная линейно-угловая засечка: новый взгляд на геометрию геодезической засечки. Инженерные изыскания. Геомаркетинг, М. 2015 №6 2. Шлапак В.В. Методические указания, программа и контрольные работы №4, 5, 6 по курсу «Геодезия». - М.: Изд. МИИГАИК, 1990, с.43. 3. Шлапак В.В. Методические указания к выполнению контрольных работ №4, 5, 6 по курсу «Геодезия». - М.: Изд. МИИГАИК, 1990, с.44.
ПРИЛОЖЕНИЕ А
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 120; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.136.17.105 (0.089 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (3.29)
(3.29) положения пункта P по осям координат Х и Y определяются по формулам:
положения пункта P по осям координат Х и Y определяются по формулам: (3.30)
(3.30) - веса уравненных значений координат
- веса уравненных значений координат  .
. (3.31)
(3.31) (3.32)
(3.32) (3.33)
(3.33)

 ;
2.
;
2.  ; 3.
; 3.  ;
4.
;
4.  ;
5.
;
5.  ;
6.
;
6.  ;
7.
;
7.  ;
8. Контроль:
;
8. Контроль:  .
.