Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Составление рабочей схемы хода
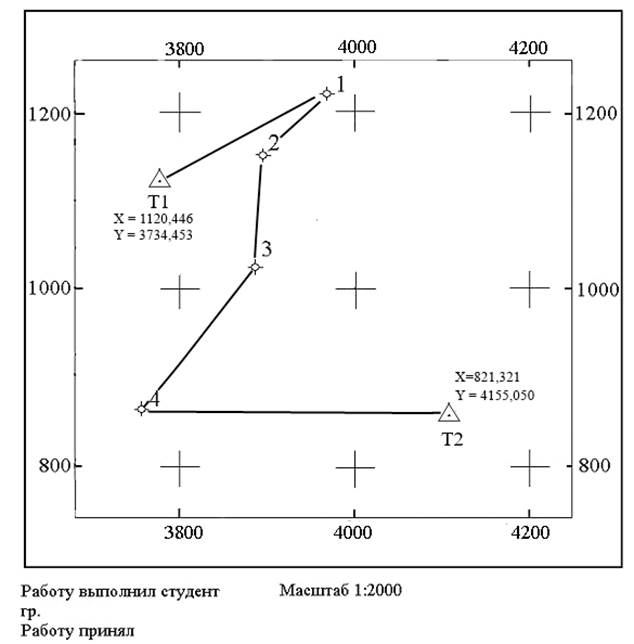
Схема хода составляется в масштабе 1:10000 или 1:25000. На схему наносятся исходные пункты (по координатам) и определяемые (по измеренным углам поворота и длинам сторон), выписываются координаты пунктов, измеренные значения углов поворота и длин сторон. Схема вычерчивается либо карандашом миллиметровке, либо при помощи системы автоматизированного проектирования (САПР). При сдаче работы через СДО в цифровой форме, схема хода прикрепляется: а) в первом случае к работе прикрепляется скан-копия схемы; б) во втором случае полученное растровое изображение схемы. Оценка точности полигонометрического хода: Далее необходимо выполнить оценку точности проекта запроектированного хода.
Рисунок 1.1 – Внешний вид оформления чертежа хода
Средняя квадратическая ошибка (М) свидетельствует о точности положения пункта в слабом месте хода после уравнивания. Эту ошибку вычисляют по разным формулам в зависимости от формы хода. Так как форма запроектированного хода может быть вытянутой или изогнутой, то для того, чтобы правильно выбрать формулу для оценки точности, необходимо воспользоваться критерием вытянутости хода. 1) полигонометрический ход считается вытянутым, если отношение [S]
где S – длина хода, т.е. сумма длин сторон; L - длина замыкающей (прямая, соединяющая начальный и конечный пункты хода); 2) ход можно считать достаточно вытянутым, если точки хода отклоняются в обе стороны от замыкающей хода в среднем на величину 1/24 (а в пределе 1/8) длины самой замыкающей; 3) линии хода отклоняются от направления замыкающей в обе стороны на 8˚(а в пределе на 24˚). Если ход вытянутый, то для оценки точности используется формула
где M – СКП положения пункта в слабом месте хода; n – число сторон в запроектированном ходе (определяется по схеме хода на карте); ms – СКО измерения линий, определяемая по паспорту прибора, которым предполагается измерять линии; mβ – ср. измерения углов, выбираемая из таблицы 2, в зависимости от класса или разряда предполагаемых работ; ρ" = 206265; L – длина замыкающей хода в сантиметрах на местности. Далее вычисляют относительную ошибку хода по формуле
При этом должно быть выполнено условие
где 1/ T – предельная относительная ошибка хода, заданная инструкцией для данного класса или разряда. Предельные относительные ошибки ходов для разных классов и разрядов приведены в таблице 2. Если относительная ошибка хода не превышает предельной, то считают, что ход запроектирован правильно. Если условие не выполнено, то можно рекомендовать для измерения углов и линий более точные приборы. Для изогнутого хода оценку точности выполняют по формуле
где Эти расстояния измеряют по схеме, а потом с учётом масштаба карты переводят в сантиметры на местности. Координаты центра тяжести хода определяют по координатам всех точек хода, включая начальный и конечный исходные пункты хода. При этом используют формулы:
где (n + 1) – число пунктов хода. При расчётах считать, что mβ = 5ʺ и mS = 0.002.
Таблица 1.1 – Исходные данные. Пункты
Таблица 1.2 – Исходные данные. Полигонометрический ход
Таблица 1.3 – Исходные данные. Коэффициенты
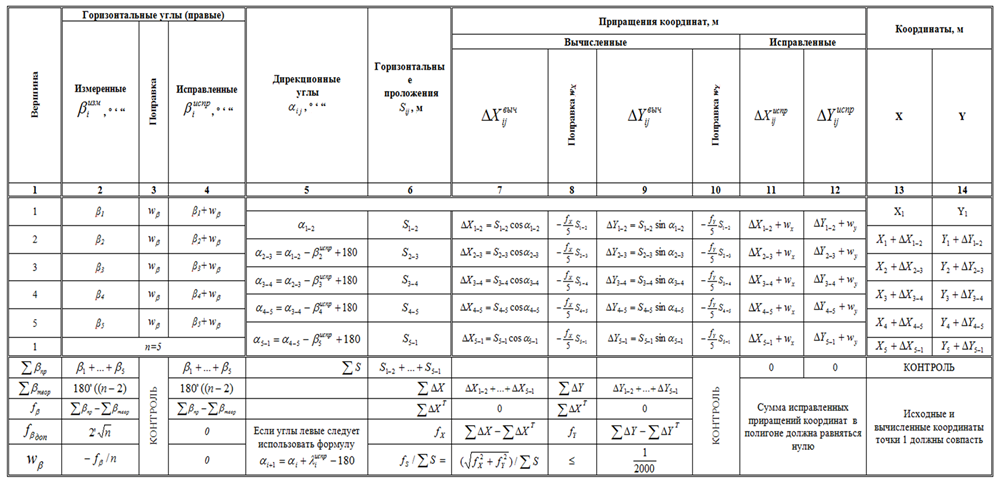
Рисунок 1.2 – Оформление ведомости расчёта координат пунктов
Задание 2. Предварительная оценка точности и решение обратной однократной линейно-угловой засечки Задачи: - Вычислить СКП планового положения пункта, полученного из решения обратной однократной линейно-угловой засечки, с заданными по варианту параметрами; - Выполнить решение обратной однократной линейно-угловой засечки; Обратная однократная линейно-угловая засечка представляет собой геодезическое построение, в котором для вычисления координат определяемого пункта (
Для вычисления СКП планового положения пункта, полученного из решения обратной однократной линейно-угловой засечки, используется следующая формула [1]:
где: Для вычислений координаты исходных пунктов (
Для получения координат определяемого пункта (
Приращения координат и координаты определяемого пункта (
Для оформления вычислений необходимо использовать таблицу 2.1 заполнив результаты промежуточных вычислений и итоговые значения. В таблице использован следующий вариант записи формулы 2.1:
где:
Таблица 2.1 – форма для проведения вычислений
Таблица 2.2 – Исходные данные
* – используется последняя цифра в вашем шифре; ** – в качестве переменной k используется второе число в вашем шифре. Например, для шифра 63зк-71 k = 71. Рассмотрим пример выбора исходных данных для шифра 63зк-71. Последняя цифра шифра равна 1, k = 71. Исходные данные для данного шифра следующие:
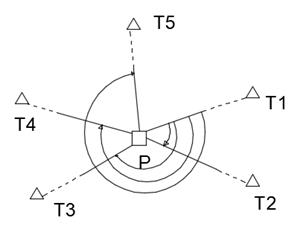
Задание № 3. Решение обратной многократной засечки. Для нахождения координат X и Y опорного пункта, практические всегда используют метод засечки. Измерения могут выполняться как на исходных пунктах (прямая засечка), так и на определяемых (обратная засечка). Каждое дополнительное измерение, вводимое в задачу сверх теоретически минимального количества, называют избыточными. Геодезические засечки без избыточных измерений принято называть однократными, а засечки с избыточными измерениями – многократными. При наличии избыточных измерений вычисление неизвестных выполняют методом уравнивания. Алгоритмы строгого уравнивания многократных засечек применяются при автоматизированном счете на ЭВМ, для ручного счета могут использоваться упрощённые способы уравнивания.
Наличие избыточных измерений с многократной засечки дает возможность вычислить координаты Цель работы: По измеренным углам β на пункте P и известным координатам X, Y исходных пунктов T (рисунок 3.1) вычислить координаты XP и YP пункта P путём уравнивания параметрическим способом результатов измерений и произвести оценку точности измеренных и вычисленных величин [2, 3]. Задачи работы: - определить приближенные координаты пункта P; - вычислить поправки δx и δy; - выполнить контроль ращения задачи; - выполнить оценку точности измерений и вычисленных координат. Координаты
Поправки
Рисунок 3.1.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 376; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.190.167 (0.053 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (1.20)
(1.20) (1.21)
(1.21) (1.22)
(1.22) (1.23)
(1.23)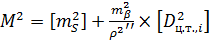 (1.24)
(1.24) – расстояние от центра тяжести хода до каждого пункта хода, включая исходные.
– расстояние от центра тяжести хода до каждого пункта хода, включая исходные. ;
;  (1.25)
(1.25) , метры
, метры
 , метры
, метры
 ) производится измерение расстояния (
) производится измерение расстояния ( ) до одного исходного пункта (
) до одного исходного пункта ( ) и угла между направлениями (
) и угла между направлениями ( ) на два исходных пункта (
) на два исходных пункта (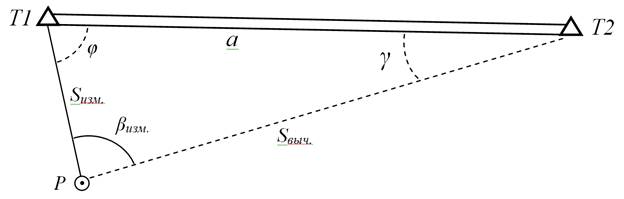 Рисунок 2.1 – Схема обратной однократной линейно-угловой засечки
Рисунок 2.1 – Схема обратной однократной линейно-угловой засечки (2.1)
(2.1) – СКП планового положения пункта в метрах;
– СКП планового положения пункта в метрах;  – СКП измерения расстояния в метрах;
– СКП измерения расстояния в метрах;  – СКП измерения угла в угловых секундах;
– СКП измерения угла в угловых секундах;  – радиан, выраженный в угловых секундах (206265ʺ);
– радиан, выраженный в угловых секундах (206265ʺ);  – угол между направлениями
– угол между направлениями  и
и  в радианах;
в радианах;  – расстояние между пунктами
– расстояние между пунктами  и
и  в радианах.
в радианах. ,
,  ,
,  ,
,  ), измеренные величины (
), измеренные величины ( вычисляется по формуле (2.3) а угол
вычисляется по формуле (2.3) а угол  (2.2)
(2.2) (2.3)
(2.3) (2.4)
(2.4) ,
,  ) необходимо вычислить дирекционный угол направления
) необходимо вычислить дирекционный угол направления  ), после чего координаты определяемого пункта вычисляются путём решения прямой геодезической задачи. В первую очередь вычисляется дирекционный угол направления
), после чего координаты определяемого пункта вычисляются путём решения прямой геодезической задачи. В первую очередь вычисляется дирекционный угол направления  (2.5)
(2.5) (2.6)
(2.6) (2.7)
(2.7) (2.8)
(2.8) (2.9)
(2.9) (2.10)
(2.10) (2.11)
(2.11)
 (2.12)
(2.12) , метры
, метры

 , метры
, метры
 , метры
, метры



 , метры
, метры




 пункта Р путем уравнивания измеренных углов по методу наименьших квадратов. При этом целесообразно применить параметрический способ, так как независим от числа избыточных измерений число неизвестных параметров всегда будет два (
пункта Р путем уравнивания измеренных углов по методу наименьших квадратов. При этом целесообразно применить параметрический способ, так как независим от числа избыточных измерений число неизвестных параметров всегда будет два ( (3.1)
(3.1) определяются из решения нормальных уравнений.
определяются из решения нормальных уравнений.