Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Другие картографические проекции, применяемые в мореплавании
· · Навигационные карты перспективных проекций. Здесь проекция осуществляется не на цилиндр, а на плоскость, касательную к поверхности из различных точек зрения. Закон построения навигационной карты в меркаторской проекции нами уже изучен. Приступим к рассмотрению навигационных карт в перспективных проекциях. Перспективные проекции. Они применяются при проектировании земной поверхности на плоскость, которая может касаться поверхности Земли, либо пересекать ее, либо находиться на некотором расстоянии от нее (Рис.1.53 b)). Такая плоскость называется картинной. Необходимое условие проекции – размещение точки зрения (К) на линии, проходящей через центр Земли и точку касания картинной плоскости. При D = 0 (т.е. точка зрения (К) находится в центре Земли) (точка О). Проекция с таким местом точки зрения называется гномонической. Если D = R (точка К) точка зрения находится на антиподе точки касания картинной плоскости. Такая проекция называется стереографической (Рис.1.53 b)). При R< D<¥ Проекция называется внешней и при D=¥ проекция ортографическая (Рис.1.53b)). Свойства перспективных проекций: Гномоническая – на этой проекции (Рис.1.53 а)) дуги больших кругов (ортодромий) являются прямыми линиями. Радиус параллели на проекции r = R tg Z. Такая проекция не равноугольна и масштабы не равны m¹n и их произведение не является постоянной величиной m*n ¹ Const. На гномонической проекции фигуры будут вытягиваться от центральной точки по радиус-вектору (r) пропорционально SecZ. Это свойство проекции позволяет прокладывать прямыми линиями кратчайшие расстояния между точками. Для получения азимута в лютой точке ортодромии составлены специальные таблицы, помещенные на самой карте. Здесь приводятся пояснения для расчета ортодромических расстояний между точками. Наиболее просто совместное использование карт в гномонической и меркаторской проекции. На гномонической проекции наносят по географическим координатам начальную и конечную точки и их соединяют прямой линией. Затем с карты в гномонической проекции снимают координаты точек ортодромии в необходимом интервале. На карте в меркаторской проекции по координатам наносят выбранные точки и соединяют прямыми линиями.
Стереографическая – на этой проекции (Рис.1.53а)) всякая окружность на поверхности будет и окружностью на плоскости проекции, кроме проходящей через точку зрения. Такие окружности будут уже прямыми. Эта проекция равноугольна m = n = Sec2 Стереографическая проекция используется для составления путевых карт полярной области (где меркаторская проекция не применима) и искажения на ней не превышают погрешностей графических построений. Чем крупнее масштаб такой карты, тем искажения уменьшаются. На планах в этой проекции локсодромия как логарифмическую спираль используют в виде прямой линии, так как на плане она будет иметь значительный радиус кривизны. Масштаб на планах в стереографической проекции считают постоянным.
  
Электронные карты. В настоящее время используется Электронная Картографическая Навигационная информационная Система (ЭКНИС) или английская аббревиатура ECDIS, работающая в двух режимах:
Карта ENC - это векторная электронная карта, которая по сравнению с бумажной имеет расширенные возможности при использовании: - отображать любую карту в удобном масштабе, - выражать и увеличивать на весь экран любой фрагмент карты, - использовать ориентацию карты, как по меридиану, так и по курсу, - получать информацию по любому объекту, отображенному на карте, - выполнять предварительную прокладку, - предусматривать контроль безопасности при исполнительной прокладке по времени, курсу, скорости и месту судна и получать предупредительные сигналы, - измерять пеленг и дистанцию на любую выбранную точку, - использовать базы данных системы ЭКНИС для получения навигационной и гидрометеорологической информации,
- снимать копии с экрана дисплея и распечатку маршрута, - при присоединении к РЛС/САРП и АИС получать необходимую информацию о целях на экране дисплея. Растровой же карте присущи недостатки: На ней невозможно автоматически выполнить: § подъем карты, § нанесение безопасной изобаты, § селекцию объектов и изображений, § вызов дополнительных характеристик объектов, § производство анализа обстановки по пути следования. Использование электронных карт сдерживается: - во первых – большой стоимостью без отмены наличия на борту полного комплекта бумажных карт, - во - вторых – по правовым причинам. При аварии по причине недостоверности карты ответственность несет фирма, издающая карты. Электронные карты пока официального статуса не имеет. Признание ENC в качестве документа возможно после обеспечения надежности аппаратуры и достоверности отображаемой информации, а также создания методов фиксации обстоятельств использования ENC в момент аварии. Временно можно использовать приборы регистрации рейса (черный ящик). До настоящего времени прибор регистрации о рейсе (ПРД) требуется иметь на пассажирских судах вместимостью 3000 р.т. и более, построенных после 1.07.2002 года. Таких судов меньшинство.
Пример. 1. По боковой рамке карты измерена длина изображения 1 мили, равная 1 см. Определить численный масштаб карты, если измерение производилось по главной параллели карты. Решение: 1 см на карте - равен 185200 см на местности, тогда: М 1: 185 200
Пример 2. Главный масштаб карты по параллели j = 40 ° N равен 1:200 000. Определить частный масштаб этой карты по параллели j =35 °50 ¢ N, учитывая сфероидичность Земли. Решение. Определяем приведенные широты: U0 = 40° 00¢ + (-) 5,7¢ = 39° 54,3¢ U = 35° 50¢ + (-) 5,5¢ = 35° 44,5¢ Рассчитываем главный масштаб по экватору СЭ: СЭ = 200 000* Sec39° 54,3¢ = 260720. Рассчитываем частный масштаб по заданной параллели С: С = 260720* Cos 35° 44,5¢ = 211 600 М 1:211600 Пример 3. Рассчитать размеры рамки промыслового планшета на район ограниченный координатами j1 = 45 °44,0 ¢ N l1 = 36 °12,0 ¢ E; j2 = 46 °21,0 ¢ N l2 = 35 °27,0 ¢ E. Размеры рамки 600Х700. Решение. Исходя из размеров горизонтальной рамки карты а = 600 мм. Определяем единицу карты: а = е (lE - lW). е = Размер вертикальной рамки планшета будет b = DN – DS. Из мореходных таблиц МТ на заданные широты рамок выбираем меридиальные части и вычисляем их разность РМЧ = 3129,2 – 3076,1 = 53,1. b = 13,3*53,1 = 706,2 мм. Рассчитаем масштаб такого планшета для j = 46°. е= Сj = СЭСosU. U = 46 – 5,8 = 45°54,2¢. Сj = 139500*0,7181 = 100 175. М 1: 100 175. Контрольные вопросы
Глав 10
Обсервации и их сущность
10.1 Изолинии и линия положения Как бы тщательно не велось счисление пути судна, оно не может обеспечить безопасность плавания. Возможные погрешности в поправках навигационных приборов (компаса, лага), неточное знание элементов течения, трудности в определении величины угла дрейфа – все это приводит к значительным погрешностям счисления и отклонению судна от заданного пути. Естественно возникает необходимость корректировать счисление по результатам измерений различных навигационных параметров. Определение места судна при плавании вблизи берегов и навигационных опасностей является необходимым условием обеспечения безопасности, а в море - ориентировки и экономичности рейса. Определение места судна (ОМС) или обсервация, это отыскание географических координат (jо, lо) той точки, где в данный момент находится судно. Для определения места судна необходимо измерить как минимум два навигационных параметра. Геометрические величины, измеряемые непосредственно или косвенным путем для определения места судна в море по береговым и небесным ориентирам называют навигационными параметрами. Измеренный навигационный параметр будет характеризовать изолинию, на которой находится место судна. Обсервация - это не только измерение двух навигационных параметров, но и выбор угла пересечения изолиний. Этот угол должен быть не менее 30° и не более 150°.
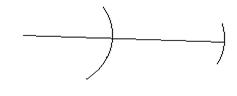
Пеленг- дистанция- разность расстояний- прямая линия окружность гипербола Изолиния на земной поверхности, представляет собой геометрическое мест точек, в которых сохраняется постоянство навигационного параметра (Рис. 1.54). Изолиния пеленга - это прямая линия (a). Изолиния расстояния - это на ограниченном пространстве окружность (b). Изолиния разности расстояний - это гипербола (c). Изолиния высоты светила - это круг равных высот. Если прямую линию и окружность на карте меркаторской проекции провести не сложно, то гиперболу и круг равных высот начертить на такой карте и трудно, и требуется значительное время. Для упрощения решения задачи изолинию вблизи счислимого места начали заменять прямой линией, касательной к этой изолинии или секущей ее, называемой линией положения.
Линия положения это прямая линия на небольшом участке, заменяющая изолинию в районе ОМС, обычно секущая или касательная к изолинии. Интересна история получения все больших знаний о линии положения. Всему виноват случай, но, как писал А.С. Пушкин «И случай, бог изобретатель» привел к целому направлению исследований линии положения. А случай навел на мысль американского капитана Т. Сомнера, круг равных высот заменить секущей, проходящей через две точки на изолинии (Рис.1.55). Когда при нанесении точек круга равных высот он увидел, что прямая соединяющая две точки изолинии при продолжении выводит прямо на маяк, он решил проверить правильность предположения о такой замене и направил судно по направлению секущей. Через некоторое время он, действительно увидел маяк прямо по носу. Это метод называют методом Сомнера или долготным. В уравнении круга равных высот (КРВ) по Sin h вычисляет координаты двух точек, задаваясь счислимой широтой и затем ее изменение на 10¢. Получают долготы (l1 l2) двух точек при jс и jс + 10¢. Такие же вычисления выполняют с высотой второго светила. В конечном итоге две секущие дают точку пересечения - ОМС. Позднее штурман черноморского флота Акимов в 1849 году предложил наносить высотную линию положения по координатам одной точки круга равных высот и вычисленному для этой точке азимуту (Рис.1.56). Линию положения проводят через рассчитанную точку КРВ, перпендикулярно азимуту (такой прием называют еще и «приемом Джексона», который издал для этого метода таблицы в 1962 году). Метод Сомнера несколько упростился.

В первой половине прошлого века советский ученый В.В. Каврайский распространил идею метода Сент-Илера на все навигационные изолинии (гипербола, изостадия и другие) и дал обобщенную теорию линии положения (Рис.1.58; 1.58а). Таким образом, счисление и обсервация это единый процесс решения основной задачи судовождения – обеспечение движения судна по выбранному маршруту.
Поэтому при всех условиях плавания нельзя пренебрегать ни тем, ни другим, а следует использовать взаимный анализ для контроля и повышения надежности судовождения.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 202; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.1.156 (0.045 с.) |
 Проекции карт, используемых в навигации в основном подразделяются на два вида:
Проекции карт, используемых в навигации в основном подразделяются на два вида: .
. .
. СЭ =
СЭ =  СЭ =
СЭ = 


 а b c
а b c 

 D1
D1